一种深度测量电路在吊放声呐中的应用
2014-07-17 07:58:42袁青裕汪雪莲
声学与电子工程 2014年2期
袁青裕 汪雪莲
(第七一五研究所,杭州,310023)
1 引言
压力传感器是工业实践中最为常用的一种传感器,广泛应用于各种工业自控环境,涉及水利水电、生产自控、航空航天、军工、船舶等众多行业。基于压力传感器的深度测量电路是水下分机传感器单元的重要组成部分,主要用于测量吊放声呐水下分机基阵的入水深度,输出的深度信号不仅为声呐发射功率大小及温深剖面图绘制给出依据,还为飞控确定飞机高度提供参考,是关系到飞机安全和声呐工作性能的重要辅助信号。
本文介绍的深度测量电路用于替代引俄吊放声呐中深度测量模块。俄制深度测量模块采用上世纪六、七十年代的电子技术,该模块以压力感应薄膜的形变指示压力。最早引进的俄制吊放声呐深度测量模块已基本接近或超过稳定工作寿命,进入了器件失效故障高发期。随着俄制吊放声呐使用时间的加长,发生故障的数量会成倍增长,研制国产深度测量电路已成为目前的迫切需要。
设计的深度测量电路研制原则是整体性能与原型部件保持一致,结构、外部接口(包括电路接口和机械接口)与原型部件相同。原型部件共设七个接线端子,接口定义见表1。
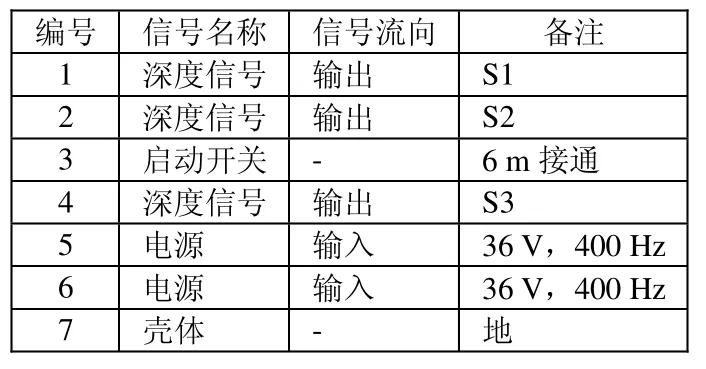
表1 原型深度测量部件接口定义
深度测量电路与原型部件的工作环境一致,且输入、输出信号相同,供电电源使用水下分机提供的36 V、400 Hz交流电,为保证干端设备对深度信号的正确分析,深度测量电路输出信号的角度值与深度值成正比,比例系数为1°/m,与原型部件一致。采用新型半导体压电阻型传感器探头,不仅实现了小型化、模块化,其精度和可靠性也得到了显著提高。通过将深度信号由常用的直流信号转变为声呐所需的两路交流信号,实现深度信息在吊放电缆中的长线传输。
2 设计方案
2.1 组成及原理
深度测量电路包括电源模块、压力传感器探头、信号调理电路、旋转变压器等部分。原理框图如图1所示。
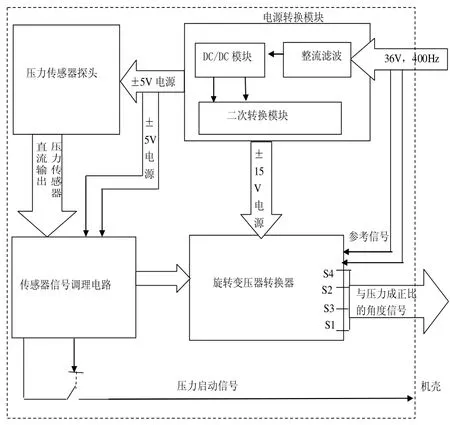
图1 深度传感器电路原理框图
深度测量电路工作原理如下:压力传感器探头利用压电转换原理产生包含深度信息的直流信号至信号调理电路,信号调理电路将传感器探头所感应的微弱信号放大,并通过A/D转换将直流模拟信号转换成含有深度信息的数字信号,旋转变压器电路将携带深度信息的数字信号转换成声呐所需的两路相互正交的正余弦400 Hz的交流信号,通过公式α=arctg(X1/X2)(式中X1、X2分别表示两路输出信号)计算出角度,再按1°/m的比例换算成压力,并实现对负载的隔离驱动。电源转换模块将水下分机提供的36 V、400 Hz交流电转换成各部件所需的直流电。
2.2 电源模块电路设计
电源模块由整流滤波电路、DC/DC模块和二次稳压模块构成。深度测量电路供电电源为36 V、400 Hz交流电,整流滤波电路将交流电压整流成直流电压,再由DC/DC模块变换为±15 V的电压供传感器信号调理电路和旋转变压器所用。
电源噪声是电路噪声的主要来源,而传感器感应的是微弱信号,电路的噪声需要降到微伏级以下。为降低电路噪声,我们在选用高效率、低噪声DC/DC模块的基础上,还采用纹波极低的二次稳压模块为前级传感器和传感器调理电路供电。
旋转变压器参考电压直接由36 V、400 Hz交流电提供,保证与接收部分的400 Hz的载波同频同相。
2.3 深度传感器电路设计
深度传感器探头采用 NPI系列压力传感器探头,压敏电阻、传感器芯片被封装在能隔离测量介质且充满液体的腔体内,腔体由不锈钢膜片和不锈钢腔体组成。该传感器探头在恶劣环境中使用时,仍能保证卓越的灵敏度、线性度以及硅传感器的迟滞效应。
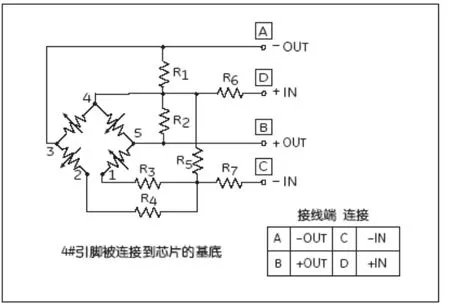
图2 深度传感器探头原理图
压力传感器探头具有以下优良特性:固态传感器的高可靠性;1.0 mA激励电流下200 mV FSO的高灵敏度;采用316不锈钢,强度高;典型线性度,0.1%FSO;典型温度准确度,0.2%FSO[1]。
2.4 信号调理电路设计
信号调理电路将传感器探头所感应的微弱信号放大,并通过单片机完成A/D转换,将直流模拟信号转换成含有深度信息的数字信号。
直流前置放大电路负责对微弱感应信号进行放大,是传感器信号调理电路的主要组成部分,该电路必须具有低噪声、高线性度等特性。为保证深度传感器的性能,直流前置放大器采用 TI公司的精密仪表放大器实现。
2.5 旋转变压器设计
旋转变压器电路是输出级电路,不仅要将携带深度信息的数字信号转换成两路正交的400 Hz角度信号,还要实现对负载的隔离驱动。设计拟选用专用数字旋转变压器 14SXZ34A(7.8V)3L-5,能提供5 VA的驱动能力,能较好地适应各种负载。
旋转变压器可将二进制数字角度量转成含有该数字角度量的电信号输出。二进制数字角度量采用了 LS/CMOS 数字锁存,输入和输出交流信号采用输入、输出变压器隔离,这样使得转换器在使用中不用外加数字锁存器,旋转变压器的原理框图如图3所示。
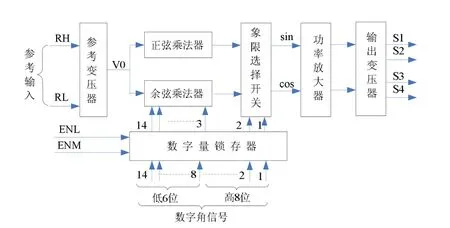
图3 旋转变压器原理框图
输入参考信号RH、RL经隔离变压后,给正余弦乘法器提供参考电压V0,V0=E0sinωt。数字角度量输入后,经数字锁存器把低 12 位连接到正余弦乘法器,高2位连接到象限选择开关,以形成全象限的正、余弦信号,经过功率放大器进行放大,最后由输出变压器升压隔离形成四线二相的旋转变压器信号输出。
该模块除具有较强的负载能力外还具有以下优良特性:高精度,14位分辨率,精度±6′;输出变压器隔离 500 Vdc;宽温度范围:−55℃~+85℃;完善的保护功能,具有过流、过热保护功能[2]。
3 试验结果
在适当的测量条件下,通过压力计对深度传感器探头打压,调整压力计使压力由0 ~1.5 MPa输出,每隔0.5 MPa记下压力计实际压力P01和深度测量电路两路输出电压表1和电压表2 的电压值X1(sin值)、X2(cos值)。根据公式α=arctg(X1/X2)逐次求出方位角α,并按 1°/m 每米的比例求出实测压力P02,将实测压力P02与实际压力测出的压力P01相减,两者之差的绝对值即为深度传感器误差。试验结果见表2。满足深度0~150 m、误差不大于 ±1 m的技术要求。
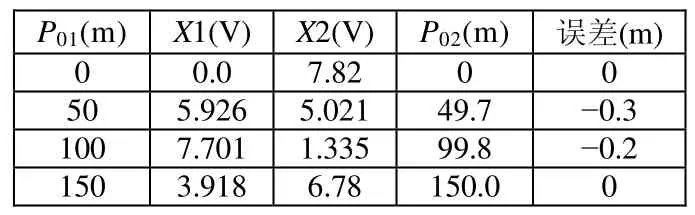
表2 深度测量电路实验结果
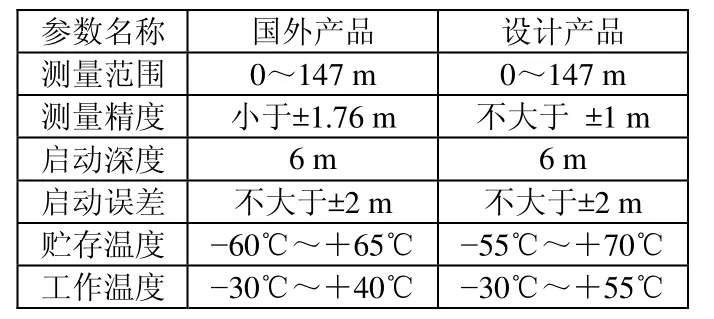
表3 性能参数对照表
由于采用新型半导体压电阻型传感器探头替代了传统的机械式压力传感器,加上电子电路和旋转变压器的应用,使得文章中设计的深度测量电路在测量精度、输出负载能力及抗电子干扰能力均优于俄制同类产品,技术指标对照表见表3。
4 结束语
本文介绍了一种深度测量电路的设计方案,详细分析了电路各部分的工作过程和设计思路。目前,该深度测量电路装置已经在实验室及湖试中进行了多次验证,并完成装机验证试飞。深度测量电路的国产化有利于军备保障的及时性和高效性,实现引进装备的国内自主维修保障,具有重要的军事和经济效益。
[1] 连云港杰瑞电子公司.产品数据手册[M].2003.[2] GE公司.传感与测量[M].出版时间不详.
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:52
今日农业(2021年19期)2021-11-27 00:45:49
基层中医药(2021年5期)2021-07-31 07:58:24
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:08
今日农业(2020年13期)2020-08-24 07:35:28
海洋信息技术与应用(2020年3期)2020-08-24 07:25:10
小学科学(学生版)(2019年10期)2019-11-16 08:55:14
今日农业(2019年16期)2019-01-03 11:39:20
通信电源技术(2018年3期)2018-06-26 06:33:30
现代工业经济和信息化(2016年4期)2016-05-17 05:35:38