丘陵山区双行玉米联合收获机的设计
2014-07-13 07:07:46刘师多师清翔王升升
河南科技大学学报(自然科学版) 2014年5期
张 奎,刘师多,师清翔,王升升,牛 康
(河南科技大学农业工程学院,河南洛阳471003)
0 引言
玉米是世界三大主要粮食作物之一。近年来中国玉米种植面积不断增加,玉米机收率却远低于小麦的90%和水稻的70%。现有玉米联合收获机的主要功能是摘穗、果穗收集和秸秆粉碎还田。但现有机型功耗大,且不能实现秸秆切碎回收,其主要原因是:摘穗后的玉米植株仍长在田间,且杂乱无章,只能粉碎还田。对秸秆粉碎还田处理,一方面消耗大量动力,另一方面也制约着玉米秸秆的综合利用。减小玉米联合收获机功耗的有效途径是以秸秆切碎代替秸秆粉碎。
中国丘陵山区玉米种植面积约占全国玉米种植面积的1/4,主要集中在中国南方、西南方以及黄淮西部等地。丘陵山区沟壑纵横,道路狭窄且路况复杂,地块小、不规则;玉米种植大多采用人工种植方式,玉米行距及生长状况差异较大。现有机型对玉米行距要求严格,很难适应不同行距玉米的收获[1-2],而且难以在丘陵山区转移和作业,市场上还没有成熟的适合丘陵山区玉米收获的机型[3]。对于丘陵山区出现的单行玉米机[4-6],因其生产效率低、对土壤碾压严重,难以推广应用。丘陵山区玉米收获机械化的发展已经成为严重制约中国玉米收获机械化全面提高的瓶颈。研发适合丘陵山区玉米收获的机型已势在必行,因此本文研制了与手扶拖拉机配套的双行玉米联合收获机。
1 总体方案配置
与手扶拖拉机配套的双行玉米联合收获机总体配置如图1所示。本机主要由茎秆切割及输送装置、摘穗及切碎装置、果穗输送装置等部分组成。该机能自行开道,可一次完成摘穗、果穗收集、秸秆切碎还田。手扶拖拉机是丘陵山区的主要动力,本机与手扶拖拉机配置,增加了其利用率,配套动力为11.03 kW,整机转弯半径小,在丘陵山区通过性好。
通过对河南省西部丘陵地区玉米种植习惯的实地考察,该地区玉米种植行距范围为400~800 mm。故设计收获行距范围为300~800 mm。茎秆切碎输送装置、摘穗及切碎装置采用左偏置方式。开道后以左侧为未收割区,右侧为收割区。
1.1 茎秆切割及输送装置
茎秆切割及输送装置主要包括可伸缩玉米茎秆引导扶持装置、横向输送带、往复割刀、纵向夹持链等部分。工作原理为:横向输送带拨齿抓取生长玉米植株,同时往复割刀从根部将其割断,由输送带完成带穗玉米植株立姿横向输送,随后由纵向夹持链将玉米植株立姿向后上方输送。该装置要求输送带拨齿抓取生长玉米植株的同时,割刀能将玉米植株割断。玉米植株直径范围为20~30 mm,因此设计输送带拨齿超出割刀30 mm[7]。夹持链与地面夹角为35°[8],缩短了整机长度。一般玉米结穗高度都在500 mm以上,本装置夹持点设计为400 mm,其高度可通过工作部件的升降来调节,以适应不同果穗高度玉米的收获。
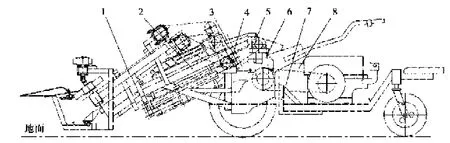
图1 与手扶拖拉机配套的双行玉米联合收获机总体配置
1.2 摘穗及切碎装置
摘穗及切碎装置主要由摘穗装置和切碎装置组成。摘穗装置主要完成玉米果穗的摘取,该装置位于茎秆切割及输送装置下方,并与之有一定重叠,纵向夹持链向后输送速度与摘穗装置螺旋筋向后推进速度一致,确保立姿带穗玉米植株在夹持链松开时能平稳有序进入摘穗装置,并在直筋段完成摘穗,避免了玉米植株未能进入摘穗辊而造成的堵塞。摘穗装置与地面夹角25°,最大限度减小了整机长度,保证整机短小灵活。两摘辊布置采用一高一低,垂直高度相差超过玉米果穗半径,以便摘掉后的玉米果穗顺利地落入果穗输送装置。
切碎装置位于摘穗装置下方,对完成摘穗后的玉米茎秆进行切碎还田,以切碎代替粉碎,有效降低了整机功耗。并改变传统的与摘穗装置垂直布置的方式,采用与摘穗装置平行配置,增大了喂入口,便于摘穗后的玉米植株流畅的进入切碎装置。切碎草长可调,可满足不同畜牧养殖要求。
1.3 果穗输送装置
果穗输送装置主要由螺旋输送搅龙等组成。通过螺旋叶片对玉米果穗的摩擦推运,将果穗输送至果穗箱收集。本装置体积小,质量轻,保证了整机的轻量小型化。入口低于摘穗装置,便于玉米果穗能顺利从摘穗装置落入。螺旋输送搅龙螺距S=150 mm,试验表明:叶片高度20 mm,转速不超过350 r/min[9]时,果穗输送效率最高,且对果穗损伤小,输送过程稳定,对不同尺寸和含水率玉米果穗有较强适应性。
2 作业过程
田间作业时(见图2),随着玉米收获机的前进,生长在田间的未收割玉米A(见图2)首先碰到可伸缩玉米茎秆引导扶持装置的引导扶持杆,由于玉米根部韧性较大,引导扶持杆向内侧缩回,当引导扶持杆上的拐点(见图2中M点)超过玉米A时,引导扶持杆在拉簧作用下反方向旋转,回到原来位置,起到扶持玉米茎秆的作用。输送带拨齿拨住玉米,同时割刀将带穗玉米从根部割断。割断后的带穗玉米处于输送带、引导扶持杆以及安装板共同形成的通道中,在输送带拨齿的作用下沿图2所示的运动轨迹立姿运送至纵向夹持链。夹持链将带穗玉米植株立姿有序输送到摘穗辊,摘穗辊完成玉米摘穗,同时将玉米茎秆向下拉入切碎装置,将玉米秸秆切碎还田。摘掉的玉米穗落入果穗输送搅龙部分,果穗在螺旋叶片推运作用下,进入果穗箱。
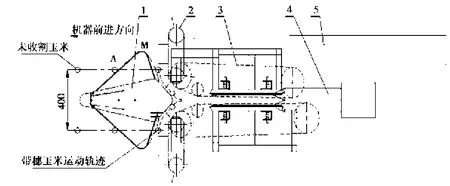
图2 作业示意图
3 主要工作部件参数的确定
3.1 横向输送带前倾角度和拨齿间距的确定
为了保证带穗玉米植株以直立姿态顺利完成由横向输送到纵向输送的过渡,应该使玉米植株在横向输送过程中就有一定的纵向输送速度,因此将横向输送带向前倾一个角度α,选取合适的α值可使输送带有与机进速度相同的分速度,输送带示意图见图3。
机进速度v为0.5 m/s,拨禾带工作速度 v1为2.45 m/s,由sin α =v/v1,得 α =11.8°。
根据收获需要,横向输送带的拨齿间距要合适。
(1)拨齿间距过小时,两拨齿到达同一抓取点的时间较短,则会出现玉米植株在还未被割断的情况下,被多个拨齿拨打,造成玉米植株的损伤甚至折断,即机器前进距离为植株直径d时所用时间为t1,则在时间t1内,经过横向输送带上同一抓取点的拨齿不能超过两个。
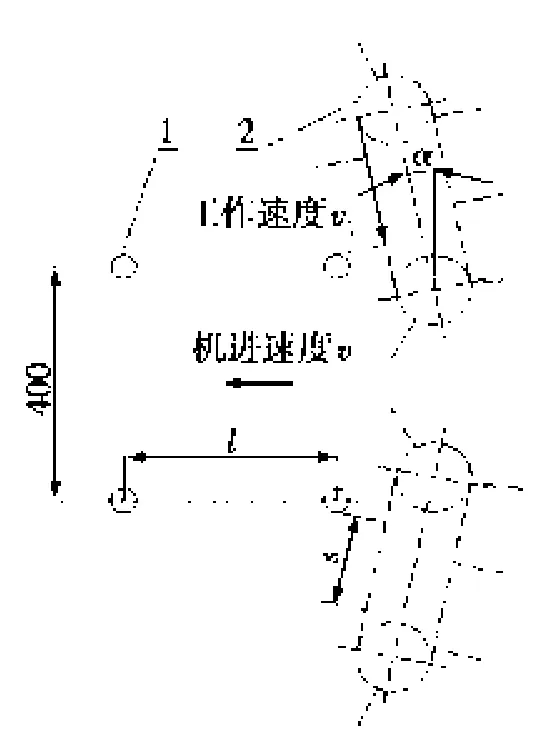
图3 输送带示意图
(2)拨齿间距过大时,两拨齿到达同一抓取点的时间较长,割断的玉米植株在这段时间内会因为得不到及时的扶持输送而发生倾倒,输送过程很可能失败,即机器前进距离为玉米株距l时所用时间为t2,则在时间t2内,经过横向输送带上同一抓取点的拨齿不能少于两个。
设横向输送带上相邻两拨齿的距离为s。则由以上两种情况可得:
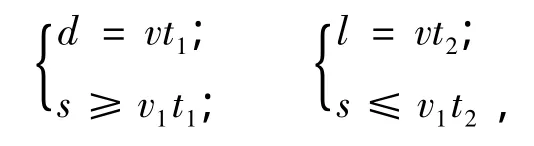
式中,根据田间实际测量,植株直径d的范围是20~30 mm,植株间距l的范围是200~300 mm。
通过计算,拨齿间距s的范围是147~980 mm,因输送带总长度为960 mm,故拨齿数值可取:1、2、3、4、5、6,本机型取4个拨齿,即拨齿间距为240 mm。
3.2 纵向夹持输送链
根据现有研究成果,选择夹持链速度v为1.9 m/s、夹持间隙为20 mm[10-11],此时玉米植株在纵向夹持输送过程中引起的断秆、倾倒等问题最少。调节夹持链张紧装置,可使玉米茎秆立姿纵向输送过程稳定、可靠。
3.3 摘辊主要参数的选择
摘穗辊[12-14]分为3部分,前部为锥形引导段,中间为螺旋筋段,后部为直筋摘穗段。摘穗辊总长度为530 mm,前部锥形引导段长度为100 mm。直筋摘穗段一般在150 mm左右,本机将两行玉米输送到同一摘辊内摘穗,故适当加长直筋摘穗段,选取200 mm。摘辊直径D在65~100 mm[15]时工作质量指标比较好。取摘辊直径D=79 mm,螺旋筋、直筋直径为D'=8 mm。一般摘穗辊的工作间隙s为:

式中,d为玉米秸秆直径,玉米结穗下部茎秆直径一般在20~30 mm,取d=30 mm,则摘辊间隙s=2~12 mm,选取s=9 mm。摘辊圆周速度v=3~4 m/s,选取摘辊圆周速度为3.8 m/s,则摘辊转速为:

为使螺旋筋向后推送速度和夹持链速度保持一致,则由nL/60=v可确定螺旋筋的螺距L=125 mm。
3.4 切碎装置及茎秆切碎长度
玉米秸秆用途不同,对切碎长度的要求也不同。秸秆还田要求切碎长度小于100 mm。畜牧业要求切碎质量好,碎段长度一致,尽量不产生长草段,超长率应小于7%;茬口整齐,斜茬率应小于5%;切碎长度可根据饲养要求变化来调整,例如,牛以30~40 mm为宜;羊则以15~25 mm为宜[16-17]。本机切碎装置可通过调整传动比来调整切碎长度。茎秆理论切碎长度l=60 000 v/(nz),其中,v为茎秆喂入速度;n为滚刀转速;z为动刀片数。取v为3.8 m/s,滚刀转速2 100 r/min,动刀片数为3,则理论切碎长度为36 mm。
4 性能测试与试验
2012年10月,河南省农业机械产品质量监督检验站对与手扶拖拉机配套的双行玉米联合收获机进行了田间试验和性能测试,测试结果如表1所示。
随后,本机型在河南省西部丘陵地区进行了大面积可靠性收获试验,试验结果表明:本机作业性能稳定,操作灵活,可靠性高,损失小,深受广大丘陵山区农民欢迎。
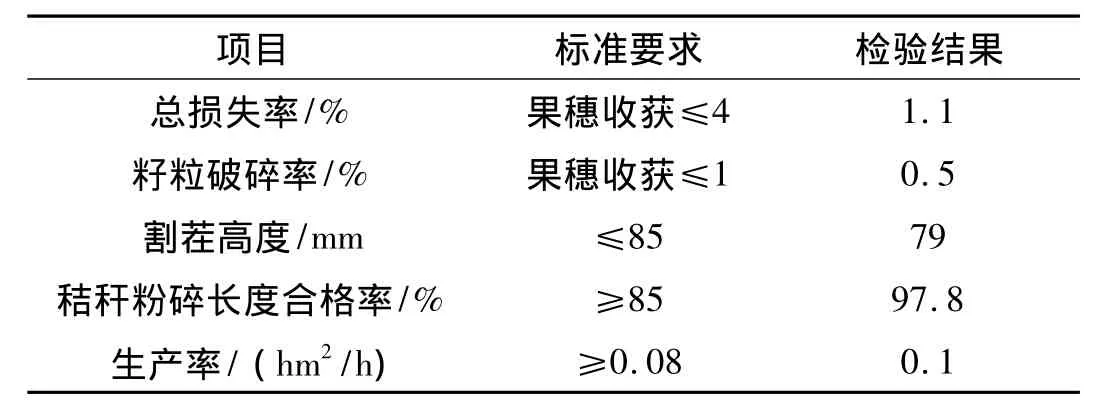
表1 与手扶拖拉机配套的双行玉米联合收获机性能测试结果
5 结论
本机器对玉米秸秆切碎处理,使得整机动力有效降低,配套动力为11.03 kW;行距适应性强,可收获行距为300~800 mm;可一次完成玉米摘穗、果穗收集、秸秆切碎还田等作业。本机器以丘陵山区保有量最大的手扶拖拉机为配套动力,实现了玉米收获机械的小型化,适合在丘陵山区推广使用。
[1]贺俊林,胡伟,郭玉富,等.扶禾杆在不对行导入玉米茎秆中的运动仿真[J].农业工程学报,2007,23(6):125-129.
[2]张道林,刁培松,董锋,等.拨禾指式不对行玉米收获装置的试验[J].农业工程学报,2010,26(5):103-106.
[3]张喜瑞.董佑福.我国玉米收获机械化的现状与发展趋势[C]//全国玉米收获保护性耕作机械化学术研讨会论文集.威海:中国农业工程学会,2006:33-39.
[4]杜岳峰,朱忠祥,毛恩荣,等.基于 ADAMS的丘陵山地小型玉米收获机仿真[C]//收获机械技术及装备国际高层论坛论文集.镇江:中国农业机械学会,2011:1-5.
[5]石敬之,吕先胜,李士贞.夏玉米不同收获时期对产量的影响[J].河南农业大学学报,1987,21(2):275-279.
[6]王毓华,张巧莲.小型手扶拖拉机配套微型玉米联合收获机的研究与设计[J].农机推广与安全,2003(6):10-11.
[7]常建国,陈宝昌,卞瑞锋,等.新型单行玉米收获机的研究设计[J].农机化研究,2001(4):46-48.
[8]赵洪光,张道林.秸秆切割装置夹持与切割关系的分析[J].山东理工大学学报:自然科学版,2005,19(4):81-84.
[9]倪长安,丁慧玲,刘师多,等.新型双行玉米联合收获机的研制[J].农机化研究,2007(9):109-111.
[10]张喜瑞,董佑福,张道林,等.玉米收获机夹持输送装置的研究[J].农业装备与车辆工程,2007(10):8-17.
[11]李光乐,覃艳雅,张喜瑞,等.玉米联合收获机夹持输送喂入装置的优化试验[J].江苏农业科学,2011,39(5):511-512.
[12]陈松涛,周学建,师清翔,等.玉米收获机摘穗装置运动参数特性研究[J].河南科技大学学报:自然科学版,2007,28(1):64-69.
[13]杨洪峰,张道林,张继磊,等.玉米收获机摘穗辊理论工作长度的研究[J].农机化研究,2010,32(1):188-190.
[14]牛康,刘师多,师清翔,等.新型玉米果穗输送装置的设计及应用[J].河南科技大学学报:自然科学版,2013,34(6):62-65.
[15]李宝筏.农业机械学[M].北京:中国农业出版社,2003:423-426.
[16]中国农业机械化科学研究院.农业机械设计手册[M].北京:机械工业出版社,1988.
[17]蔺公振,姬江涛,貌建华,等.滚筒式铡草机设计[J].洛阳工学院学报,2000,21(1):11-13.
猜你喜欢
今日农业(2020年18期)2020-12-14 19:08:44
文学港(2018年1期)2018-01-25 12:48:44
散文诗(2017年22期)2017-06-09 07:55:21
滇池(2016年2期)2016-05-30 17:58:42
中国农业文摘-农业工程(2016年5期)2016-04-12 05:38:11
设备管理与维修(2016年5期)2016-03-16 02:20:53
现代农业(2016年6期)2016-02-28 18:42:54
橡胶工业(2015年10期)2015-08-01 09:06:02
山东农机化(2015年6期)2015-01-03 08:09:45
山东工业技术(2014年19期)2014-08-15 00:54:54