
基于Pro/E的喷气织机六连杆开口机构运动分析与仿真
2014-07-11 07:43付正飞韩立人
制造业自动化 2014年8期
付正飞,韩立人,马 莉
FU Zheng-fei1,2, HAN Li-ren1, MA Li1
(1.湖北文理学院 机械与汽车工程学院,襄阳 441053;2.湖北文理学院 省级协同创新中心,襄阳 441053)
0 引言
由于六连杆开口机构的加工方便、刚度高、运动平稳,因此噪声低且磨损少,被广泛应用在造平纹织物的喷气织机织中。开口机构运动的平稳性直接关系到布面的编织质量,开口机构运动出现波动会在布面上形成瑕疵,甚至造成断经而应影响生产效率,所以对开口机构进行运动学分析十分重要。作图法和实验法误差很大且设计时间长,不能满足设计精度和现代产品开发的要求[1];运用复极矢量法建立机构的解析方程组、用高级语言编写程序来求解综框运动特性的方法[2],既复杂费时又需要高深的数学知识,不易被工程技术人员所掌握。本文借助三维的Pro/E软件,通过建立开口机构的三维参数化模型和各构件之间的连接关系,并进行运动仿真,可直接获得综框的运动特性和各结构点的运动轨迹曲线等数据,实现对机构的运动特性分析和结构尺寸的调整。
1 六连杆开口机构的工作原理和工作要求
开口机构是纺织机五大机构之一,是形成织物所必需的重要机构[3,4]。在棉纺织过程中,开口机构的任务是依照织物组织要求,顺次驱动综框上下运动,把穿入各页综框内的经纱上下分开成两层,以形成梭口,待纬纱引入后再使梭口闭合,构成经纱、纬纱的交织状。
六连杆开口机构是在四连杆开口机构的基础上改进成,一般用于织造平纹织物,如图1 所示。其工作原理是[5]:曲轴O1A绕O1轴作360°旋转运动,O2B杆绕轴作往复摆动,连杆AB则作平面运动;当铰链C随AB杆作平面运动时,由中连杆CD将运动传递到三臂摆杆DEE′,使其绕机架上的支点O3摆动,然后通过综框长臂连杆EF、E′F′, 驱动综框作上下运动形成开口;该开口机构由一个六杆机构 O1A BO2CDO3和两个曲柄滑块机构O3EF 和O3E ′F′组合而成,六杆机构是在曲柄摇杆机构上并接一组Ⅰ级杆件 C DO3而成。当各铰链位置和连杆长度给定后, 可以确定综框的运动规律。
梭口是指开口时自停经架中导棒至织口、经纱被上下分开所形成的菱形空间,梭口形成分为三个时期:开口时期、静止时期和闭口时期。经纱离开经位置线到梭口满开时称为开口时期,这时综框运动的速度应由快到慢逐渐减小,经纱张力由小到大逐渐增加;当梭口满开后,经纱在梭口上下两个极限位置上处于静止状态,以便引纬器通过梭口;之后梭口开始闭合,经纱由静止进入运动状态,直至综平,经纱张力逐渐减小,其传动函数曲线如图2 的实线所示,φ为主动曲柄的转角,s为综框的位移。若采用四连杆机构,传动函数曲线为图2中虚线所示,因中间无停歇时间较短而不能满足织机的工艺要求,为此常采用六连杆机构,平滑在开口两极限位置处的速度,从而增加开口的相对静止时间,使其基本满足工艺要求。
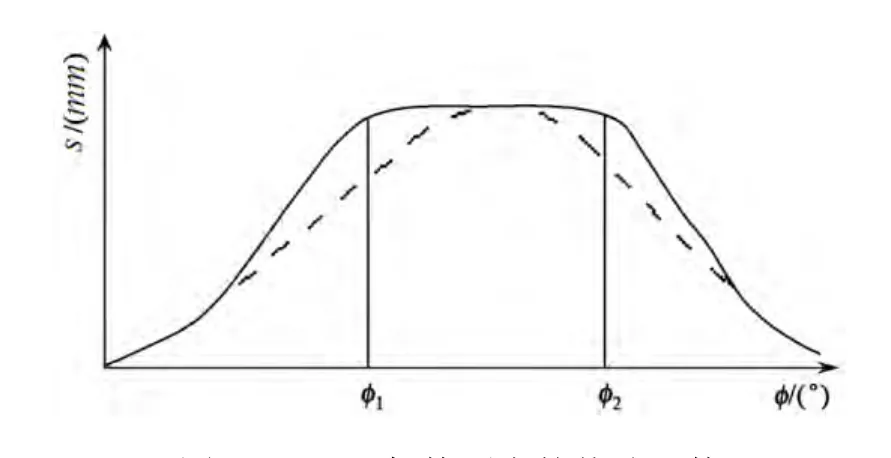
图2 开口机构要求的传动函数
2 基于PRO/E的开口机构参数化建模与运动仿真
六连杆开口机构的运动特性是否满足实际需求,传统的方法是利用建立复极矢量来建立机构的解析方程组,通过编写程序进行求解综框的位移、速度和加速度数值,该方法复杂费时、需要高深的数学知识。本文借助三维的PRO/E软件,通过建立开口机构的三维参数化模型,并进行装配和运动仿真,实现对机构的运动特性分析和结构尺寸的调整。其过程如下[6,7]:
1) 测绘喷气织机的结构尺寸。现以44英寸的喷气织机为例,各连杆长度为O1A =60mm ,O2B =140mm ,AB =360mm ,AC =190mm ,CD = 280mm ,O3D =55mm ,O3E =110mm ,EF =520mm, O2和 O3相对于 O1的位置坐标分别为(-360,-127),(-248,-274),织机转速为350转/分。
2) 建立各构件的三维模型。在Pro/E中,首先根据上述数据建立关系式,以实现模型的参数化造型;再利用拉伸、旋转和阵列等工具,依次指定截面草图、深度、方向等参数,构建出六连杆开口机构的各个构件。
3) 构建喷气织机的装配模型。在Pro/E中,使用“销钉”和“滑动杆”约束方式,定义组件中各零件间的相对自由度,建立一定的约束关系,从而确定构件在整个装配体中的相对位置,织机装配模型如图3所示。实际设计的六连杆开口机构均采用双侧传动形式。
4) 开口机构的运动仿真。进入PRO/E机构操作环境,通过设置旋转运动伺服电动机为机构提供“动力”,选择“运动学”类型,并设置时间周期和运动增量,就可进行机构的运动仿真。

图3 织机的装配模型
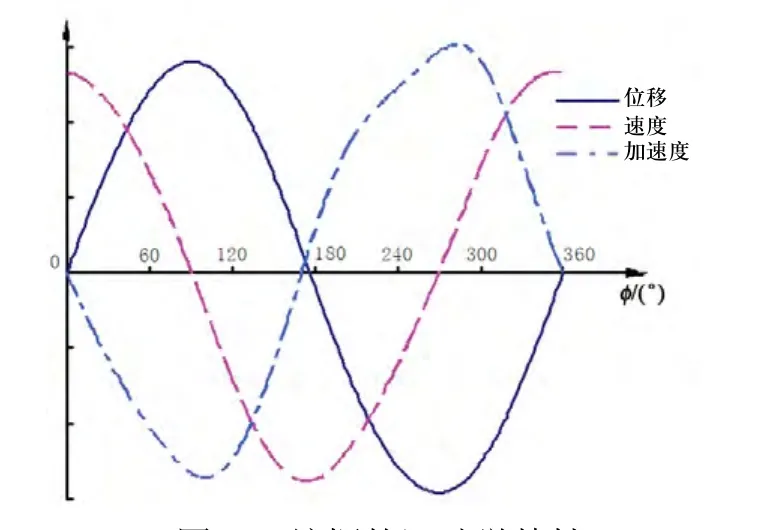
图4 综框的运动学特性
5) 测量综框的运动分析结果。在Pro/E中,利用分析测量功能即可方便地获得机构中各个部件的位移、速度、加速度的测量值。在此需要对综框进行运动学分析,分别选择“位置”、 “速度”、“加速度”测量类型,由于综框做直线运动,可以选择综框上任意一点作为测量点,测量的结果如图4所示。
3 六连杆开口机构运动分析结果
通过在Pro/E软件机构分析模块中对六连杆开口机构的运动学分析,得出了综框的运动曲线,可以发现:其运动特性与曲柄四连杆机构类似,综框的位移、速度和加速度曲线连续而光滑,运动平稳、没有绝对静止过程,而且各页综框动程相等。同时为了保证机构本身的刚度和强度,设计了双侧机构形式来传递运动,保证双侧机构相位同步,避免机构出现死点而无法运行。
六连杆开口机构设计的关键是确定C点的位置,C点的运动规律决定了O3轴的相应摆角大小和综框的特性。在Pro/E软件里,使用“插入—>轨迹曲线”工具,可以生成机构上任意一点的运动轨迹,C点的运动轨迹如图5所示。从图5中可以看出:C点的轨迹呈类椭圆形状,而且随AC长度的增大, 椭圆形状越扁,轨迹椭圆的长轴长度不变,即O3轴的摆角不变、棕框的极限位置不变;其短轴长度缩短,这可为增加综框在极限位置附近的相对静止时间创造条件。
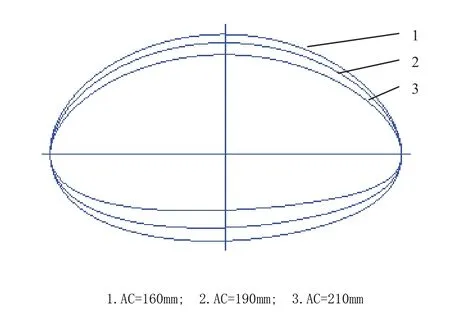
图5 C点的运动轨迹图
通过机构运动仿真,可以观察到CD杆对机构的影响:根据椭圆形状,当增加CD杆的长度,将使O3D杆向下面摆动时的相对静止时间增加,而向上面摆动时的相对静止时间减少;反之,如果缩短CD杆长度则O3D杆向下面摆动时的相对静止时间减少,而向上面摆动时的相对静止时间增加。调节CD杆的长度,使上下两方向的相对静止时间接近相等为益。改变O3D杆的长度时,只能改变O3轴的摆角大小,它对综框的运动规律并无影响,因此在结构允许的情况下,适当减小O3D杆长度,就可增大O3轴的摆角,在综框行程不变时,可通过减小双臂杠杆 EE ′长度来增加EF杆对综框的传动角,从而能够增大综框向上运动的有效分力,减少使综框前后晃动的水平分力,也有利于减少综框在导轨中的磨损。
通过对结构点位置的正确选择,能够使二次综平时间达到一致;也可以适当调整机械结构尺寸,如增加EF杆长度,能增大综框行程即梭口高度,以弥补满开时的综框相对静止时间较短的不足。
4 结束语
随着现代新型织机的快速发展,对织机的设计要求会愈来愈高,应用Pro/E三维软件建模工具实现了六连杆开口机构的参数化建模, 对织机开口机构的运动特性作进行了深入分析,可以直接获得综框的运动速度、加速度特性和各结构点的运动轨迹曲线等数据,在此基础上,提出了对结构点位置和结构尺寸调整的方法和措施,以增大综框行程或梭口高度,使二次综平时间达到一致,为机构设计提供理论依据和指导。
为织机的结构设计提供了一种切实可行的可视化、实时化设计新思路,能够使设计更加直观、简洁,降低了设计难度,有利于一般工程人员掌握和应用。
[1] 刘裕宣,陈人哲.纺织机械设计原理[M].北京:中国纺织出版社,1996:34-88.
[2] 曹惟庆.连杆机构的分析与综合[M].北京:科学出版社,2002:74-116.
[3] 王卫东.纺织机械共轭凸轮反求设计研究[J]. 制造业自动化,2012,(23):65-66.
[4] 袁守华,朱国华.织机六连杆打纬机构的计算机辅助设计[J].纺织学报,1999,20(2):37-39.
[5] 邱海飞,王益轩.前死心位置处的六连杆开口机构振动分析[J].机械传动,2013,37(2):84-86.
[6] 张俊,刘亚丽.基于范成运动的平行分度凸轮机构设计[J].制造业自动化,2013,(8下):134-136.
[7] 卢志珍.基于Pro/E伸缩折叠起重机虚拟设计与运动仿真[J].制造业自动化,2012,(6):75-76.
猜你喜欢
棉纺织技术(2022年11期)2022-11-15
石油矿场机械(2022年3期)2022-06-17
晚晴(2022年2期)2022-06-01
纺织器材(2021年2期)2021-05-21
装备制造技术(2020年2期)2020-12-14
棉纺织技术(2019年9期)2019-09-11
中国纺织(2018年11期)2018-12-13
国际木业(2018年3期)2018-09-10
科学与技术(2018年22期)2018-06-17
纺织服装周刊(2018年16期)2018-05-15
