关节臂测量机蛙跳功能的使用
2014-07-09 11:41:00徐州徐工筑路机械有限公司江苏221004戴宝庆薛二赛
金属加工(冷加工) 2014年13期
徐州徐工筑路机械有限公司 (江苏 221004) 戴宝庆 韩 松 薛二赛
1.关节臂测量机介绍
关节臂测量机是一种便携式的测量仪器,主要由关节臂、测头、底座和电池等组成。它模拟人的手臂运动方式用测头触碰各个待测点,用无线方式将数据传输到电脑中,通过专业软件进行数据处理,具有体积小、使用方便及性价比高的特点。我公司引进的关节臂测量机各轴采用了绝对编码器,消除了以往对编码器复位的要求,开机即可开始测量,缩短了测量前的准备时间。
2.蛙跳测量过程
待测工件为拌和机转子,待测量的关键尺寸为:两止口距离 2 232-0.5-1.0mm、两止口轴线同轴度φ0.15 mm(见图1)。由于测量范围的限制,无法一次测量两端面的内壁和止口,需要采用蛙跳的方法测量。
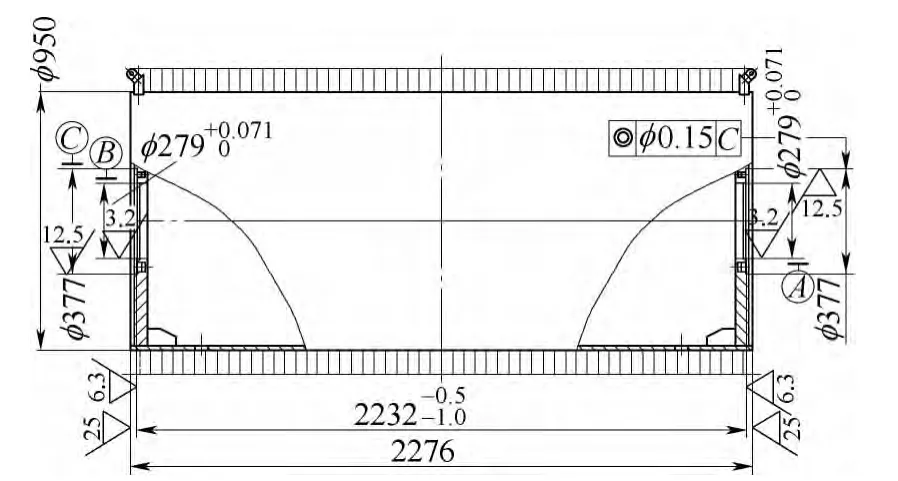
图 1
(1)准备工作。固定好工件和关节臂测量机,在屏幕上输入相关信息 (见图2)。放置蛙跳测量基准 (见图3)。
(2)同轴度的测量常用公共轴线法,一般在待测量孔测出一系列的截面,对这一系列截面中心形成的轴线与公共轴线进行比较,评价偏差值是否超差。如图4所示为正在测量一端的一个截面,一般上下左右4个方向各取一点,至少需要测量2个截面形成1个柱体,以柱体的轴线进行比较。

图2 输入信息界面

图3 放置好的测量基准

图 4
(3)测量平面 (见图5),最少选取3个点。

图 5
(4)触碰基准点 (见图6)。

图 6
(5)测量另一端的平面和孔壁,方法同前 (见图7)。
(6)屏幕显示的信息 (见图8)。两个平面和柱体已测量完毕。

图7
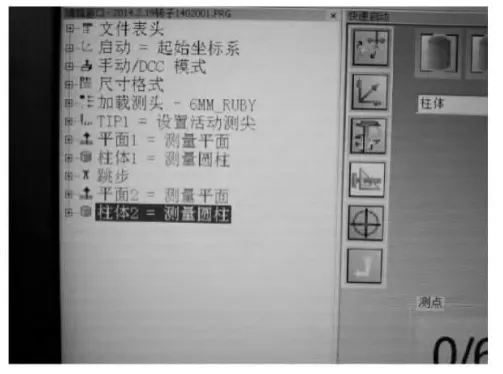
图8
(7)正在进行数据处理 (同轴度),如图9所示。
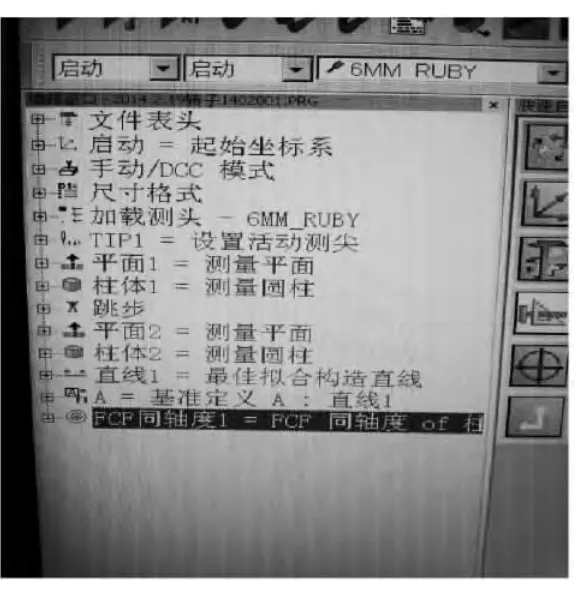
图 9
(8)测量结果 (见图10)。
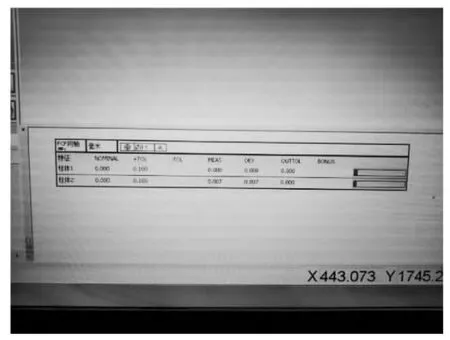
图 10
(9)结果评价 (同轴度)。在滚筒两端分别测量两个环面,各自形成的轴线和这两端共同形成的轴线偏差为0.007 mm和0.008 mm,符合设计要求。
3.操作的注意事项
(1)由于蛙跳过程是基准转换的过程,要求基准稳定,因此测量前工件的固定很重要,一定要稳固,操作过程要稳、准。
(2)蛙跳后测量精度会降低,因此要预先评估蛙跳后的测量精度是否在测量项目的允许范围内。否则会造成误判。
(3)采用测量基准的方法蛙跳时,移动测量机后,要按相同顺序重新测量相同的3个基准。
猜你喜欢
体育教学(2022年4期)2022-05-05 21:26:58
海洋工程(2021年1期)2021-02-02 02:48:12
水下无人系统学报(2020年1期)2020-03-06 09:52:32
制造技术与机床(2019年6期)2019-06-25 10:18:02
高中生学习·高二版(2017年9期)2017-10-25 06:46:21
凿岩机械气动工具(2017年2期)2017-07-19 10:21:14
中国设备工程(2017年10期)2017-01-20 12:15:14
光学精密工程(2016年3期)2016-11-07 09:03:25
娃娃画报(2016年5期)2016-08-03 19:25:40
河南科技(2014年8期)2014-02-27 14:08:00