
一种基于软件的数据时标修正算法
2014-07-09 02:31张鑫波
河北省科学院学报 2014年1期
张鑫波,张 冰
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
在测控领域中,测角数据的准确性直接决定着卫星的定轨精度。各测控站在每次任务中直接将打有时标的测角数据上报中心。为便于比对和数据分析,中心要求各测站上报的测角数据时标必须是整点形式(通常取整50ms)。而各测站的整点测角数据,大多是基于Windows中断机制采集保存的。在实际工程中,计算机上运行的各程序软件都会不同程度地采用Windows中断,这样势必会影响测角数据的时标采集,偶尔会出现中断丢失或时标不整点的现象。尽管测角数据是真实的,但不便于中心进行数据比对。因此,笔者试图采用软件修正的办法对数据时标点进行修正,以提高数据的比对效率。
1 软件修正算法
各设备在硬件中断(50ms)中,都会通过时统卡读取时统的系统时间,首先将包含年月日时分秒毫秒的时间转换为毫秒,经过与上一个周期记录的时间进行比对,如果时间差为整50ms,则认为正确时标,否则需要进行时标修正,并利用前几点数据计算出修正后时标对应的数据点。对于算法中用的一些变量,定义如下:
T0:当前的系统时间转化为的毫秒数;
T1:上一个周期系统时间转换为的毫秒数;
Δ:当前时间与上一周期时间毫秒时间差(即:T0-T1);
bStart:基准时间点选择标志;
M:毫秒时间差包含50ms的个数(即:Δ/50,除法结果的商);
N:毫秒时间差减去50ms倍数后的余数(即:Δ%50,除法结果的余数);
A0:当前周期内的角度值;
A1:前一个周期内的角度值;
A2:前两个周期内的角度值。
1.1 基准时间点的选择
算法通过对时间间隔Δ进行比较分析。重要前提,就是上一周期时间点必须是准确的整50ms,否则无法保证后续时间修正的准确性,其程序流程图见图1。程序初始化时各参数变量均为零,第一个判断为了使软件或时统设备在启动正常后进入本流程,第二个判断用于跳出对初始基准时间点的选择,第三个判断是对初始基准时间点T0的选择。
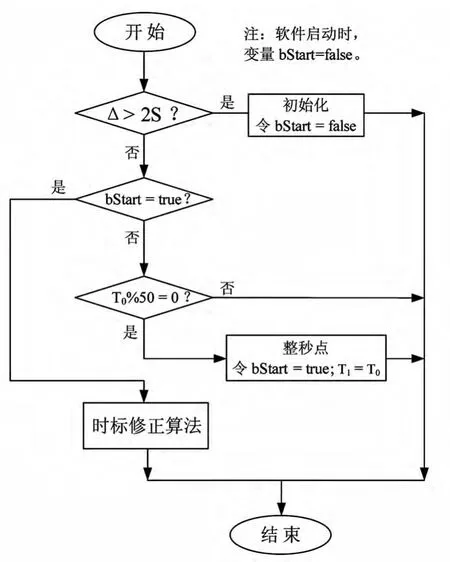
图1 时标基准点选择流程图
1.2 数据递推迭代
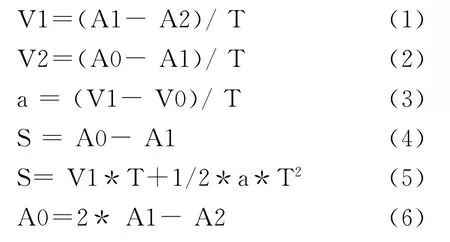
根据物理学中的速度相关公式,可以由前两点的速度、距离信息递推出下一点的距离信息。将式(1)~ (4)带入(5)中,可推到得到式(6)。
1.3 时标修正算法
经过对大量数据记录文件的分析,发现时标数据的变化主要包含以下4种情况:
1)时间间隔Δ=0,即连续产生了2次中断,采集到了相同的数据,丢弃本周期内采样数据;
2)时间间隔0<Δ<50,当Δ>40时迭代递推出下一个临近整50ms时间点数据,否则丢弃本周期内采样数据,不做任何处理;
3)时间间隔Δ=50,正确的时间采样数据;
4)时间间隔Δ>50,即本中断采样时间滞后或出现中断丢失的情况,需要计算出错过的整50ms的时标,并迭代递推出该时标点的数据,对于Δ%50后的余数,可采用情况2)中的相关处理方法。
结合以上4种现实情况的分析,可以得到具体的时标修正算法流程图,见图2。针对需要修正的时间周期,由上一周期系统时间累加50ms得到当前系统时间,并利用前几个周期的数据点递推得到当前时间点数据,同时依次更新前几个周期内的数据信息。

图2 时标修正算法流程图
2 应用实例
首先,得到未采用时标修正算法的记录文件中时间间隔Δ的相关数据,见图2。其中,时标出现了很多跳点,即非整50ms的时间点。当采用了时标修正算法后,可以得到效果图3。图中时间间隔始终为50ms,完全解决了时标异常的问题。同时,上报的测角经比对,均满足系统精度要求,也验证了数据迭代的正确性。
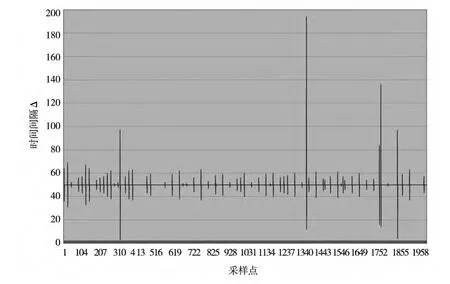
图3 未采用时标修正算法的时标信息图
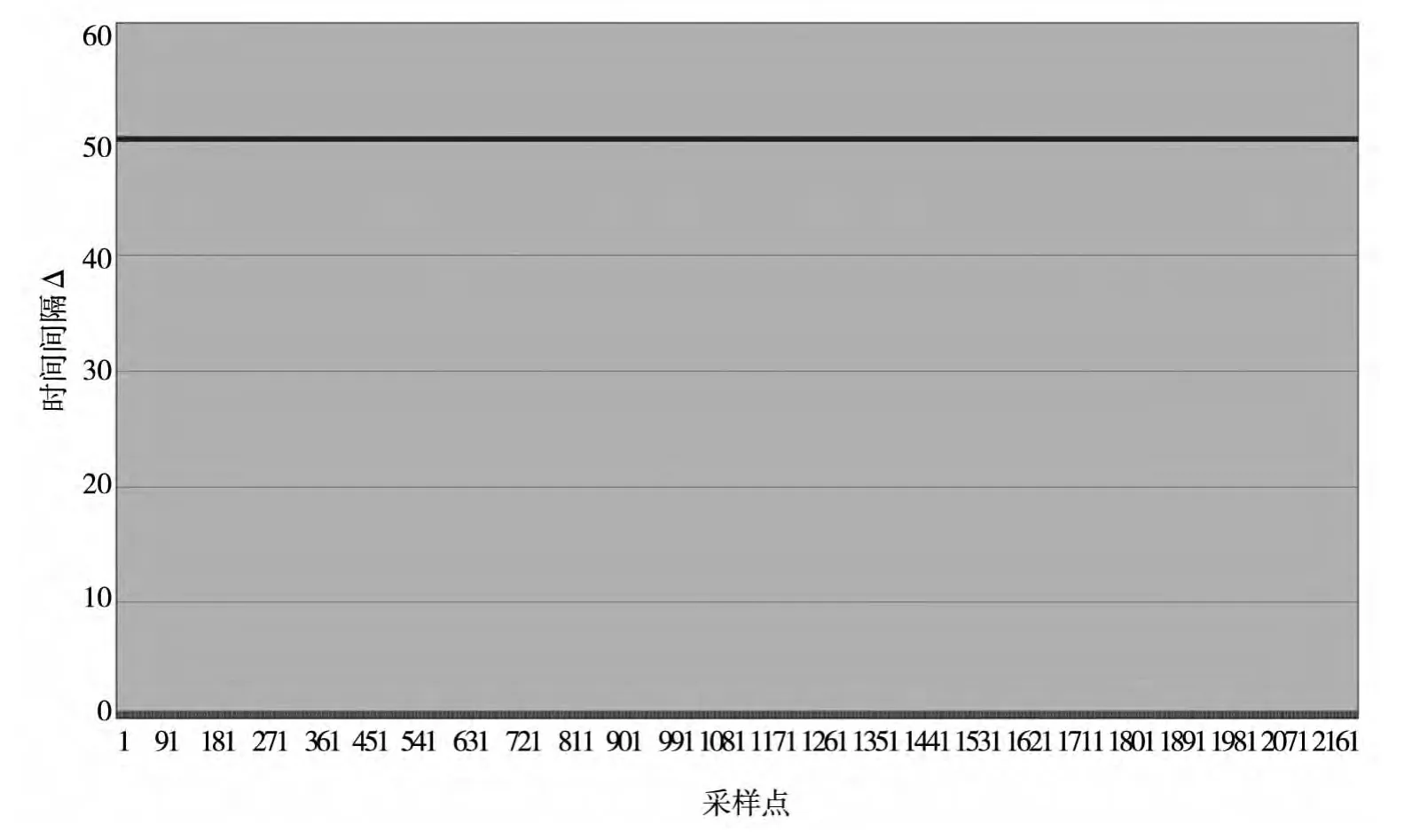
图4 采用时标修正算法的时标信息图
3 结束语
经过验证,该算法能够完全消除上报数据中时标异常的现象,并且已经应用在某9m测控天线中。经过长期运行,时标及测角的精度均满足系统指标要求。该算法简单,容易实施,节约了改造硬件的成本,极大地增强了系统的稳定性和可靠性。
[1]申强.一种在实时控制中数字滤波的算法[J].通讯与测控,2004,(3):10-13.
[2]徐孝凯.C++语言基础教程[M].北京:清华大学出版社,2003.
猜你喜欢
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年1期)2021-03-29
北京航空航天大学学报(2020年10期)2020-11-14
航天电子对抗(2018年3期)2018-07-14
山东工业技术(2017年23期)2017-11-28
演艺科技(2017年8期)2017-09-25
测绘科学与工程(2016年6期)2016-04-17
科技与创新(2015年17期)2015-09-11
电子设计工程(2015年8期)2015-02-27
雷达学报(2014年4期)2014-04-23
