
舰船模型试验用加速度计标定方法研究*
2014-07-07 09:10肖昌润刘瑞杰
传感器与微系统 2014年10期
肖昌润, 刘 洋, 刘瑞杰
(海军工程大学 舰船工程系,湖北 武汉 430033)
舰船模型试验用加速度计标定方法研究*
肖昌润, 刘 洋, 刘瑞杰
(海军工程大学 舰船工程系,湖北 武汉 430033)
为模拟舰船模型运动过程中加速度的输出状态,通过加速度计的静态输出与转台旋转的动态输出相结合的方法来实现。利用最小二乘法、阻尼最小二乘法以及Isight数据优化方法来处理测量数据,并得到加速度计的标定系数,从而使标定后的加速度计达到工程应用的精度。
舰船模型;加速度计;标定;多角度
0 引 言
舰船模型试验中,常常需要测量模型舰船的运动量,例如:速度、加速度、横摇和纵摇角度以及角加速度等状态量[1]。试验中标定的是MEMS数值型加速度计,是一种三轴向加速度计,被广泛应用于舰载卫星导航系统、军用民用飞行模拟器等,虽然该加速度计是一种较成熟的产品,但也存在长期稳定性较差、明显的时漂现象等问题,因此,需要对试验中所用加速度计进行标定[2]。目前,对于加速度计的标定很多文献都作了介绍,并提出了不同的标定方法。加速度计的标定可分惯性系统中的静态标定、精密离心法及动静混合高精度标定方法[3]。精密离心法所需要的硬件条件比较高,需用到精密离心机和相配套的高精度转台等,需要较大的资金支持,而且试验数据的解算十分繁琐[4]。
针对舰船模型试验中,加速度计并不需要如此高精度。本文采用加速度计的静态输出与转台旋转的动态输出相结合的方法来模拟舰船模型运动过程中加速度的输出量,并利用最小二乘法、阻尼最小二乘法以及Isight数据优化方法来处理试验数据,得到加速度传感器的标定系数。设备装置简单,易实现,并能够达到对加速度计的标定的目的。
1 加速度计的标定装置
如图1所示,整个标定装置包括电机、旋转平台、电源、下位机、无线发射器、上位机、加速度计、角度调节装置等。上位机通过无线发射器控制电机进速,下位机接收加速度计的数据输出,并通过无线发射器与上位机相连通,将加速度计的实时数据反馈到上位机中。

图1 装置组成框图Fig 1 Block diagram of device composition
2 标定模型的建立
在惯性系统下,加速度计通过自制旋转台进行试验标定。一方面舰船模型中加速度计的所需精度不需十分精准;另一方面,由于旋转台的旋转速度并不是很高,从而可以忽略转台转动产生的附加哥氏加速度[5]。舰船模型中加速度计的输入主要有两个方面:向心加速度和重力加速度。本节所研究的加速度计标定模型根据不同方向的输出值(即试验测量值),建立相应的数学模型,并通过试验值对试验结果进行拟合,估算得到偏差较小的数学模型的参数值。加速度计的简化模型如图2。

图2 加速度计的简化模型图Fig 2 Simplification model diagram of accelerometer
2.1 水平面标定数学模型
对惯性系统中的加速度计进行标定时,主要的偏差是零偏误差、旋转台旋转误差、偏心误差、偶然误差以及安装误差等[6]。在本节的标定模型中,将零偏误差、旋转台旋转误差、偏心误差、偶然误差等方面的误差综合考虑,当作加速度计不同状态下的状态误差,在建立模型时作为一项标定参数,即Axp,Ayp,Azp。安装误差是由安装加速度计时存在倾角造成的,即Eij(i,j=x,y,z;且i≠j)。另外一项标定参数为标定系数,即Sx,Sy,Sz[7]。从而建立相应的数学型模为
(1)
2.2 仿舰船模型运动状态多角度标定模型
当加速度计XY,YX,ZY平面与旋转平面存在一定的夹角时,运用上述运算模型会增加计算误差,且由于只是单独考虑加速度计各个方向上的加速度,均会使标定产生误差,且与舰船模型加速度计的实际应用情况不相符[8]。本文将利用上述标定模型,结合舰船模型加速度计的实际工作状态,在水平面标定的基础上推导出一种适用于舰船模型加速度计标定的非线性计算模型
(2)

安装加速度计时,将加速度计的XY,YX,ZY平面与旋转平面相平行,同时将加速度计的X,Y,Z方向指向旋转台中心方向。测量记录转台在0,20 ,46 ,56,66,76,86 r/min转速下加速度传感器X,Y,Z方向上的数值,得到测量数值axi,ayi,azi。
3 标定过程与误差分析
3.1 水平面标定试验和数据处理
具体试验与分析过程如下:
1)将加速度计XY平面水平安装在转台上,X轴向指向旋转圆心,旋转转台,采集2~3 min,记录数据。
2)将加速度计YX平面水平安装在转台上,Y轴向指向旋转圆心,旋转转台,采集2~3 min,记录数据。
3)将加速度计ZY平面水平安装在转台上,Z轴向指向旋转圆心,旋转转台,采集2~3 min,记录数据。
4)通过对加速度计输出编码进行转换,得到相应加速度值,并将每种转速下采集数据求平均值作为该转速下加速度值。
5)通过调整加速度计位置和转台转速选取9组数据。考虑到加速度计的测量范围,本文选取0,46,86 r/min转速状态作为计算状态,利用上述标定模型,估算标定模型各项参数。
当加速度计XY平面水平安装在转台上,X轴向指向旋转圆心,旋转转台转速为46 r/min时,加速度计标定数学模型如下
(3)
i取不同值代表不同转速下的加速度计输出值,上式中加速度单位为gn(gn代表一个重力加速度),利用最小二乘法运算得到相应的标定参数,对加速度计进行标定,得到标定系数,加速度计的X方向标定过程如下(Y,Z方向加速度和输出量标定与X方向标定相同)
(4)
其中
(5)
对不同转速试验得到的多组数据进行标定,与理论数据相比较,误差如图3~图5。

图3 X方向偏差对比Fig 3 Deviation comparison of X direction
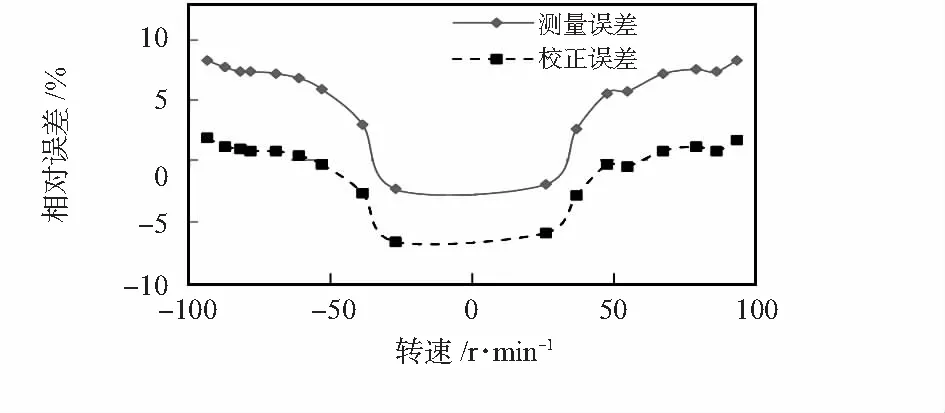
图4 Y方向偏差对比Fig 4 Deviation comparison of Y direction

图5 Z方向偏差对比Fig 5 Deviation comparison of Z direction
3.2 仿舰船模型运动状态多角度标定试验与数据分析
具体试验与分析过程如下:
1)将加速度计的沿XY,YX,ZY平面分别与旋转平面成30°,60°,135°,测量记录转台在不同转速下加速度传感器X,Y,Z方向上的数值,得到测量数值ax,ay,az。
2)将加速度计的XY平面与旋转平面成135°,ZY平面与旋转平面成45°,测量记录转台在不同转速下加速度传感器X,Y,Z方向上的数值,得到测量数值ax,ay,az。
根据加速度计的输入与输出相等,可以得到运算模型
(6)
模型中标定参数共有12个,故需要选取数据组要不少于12组,本文选取16组数据,分别对应加速度计不同安装角度下相同转速下的测量值,如下
(7)
由于计算模型是非线性的,在计算中需要对计算模型进行降幂。选取水平标定中的系数为初始值,对每个方程的未知参数做一阶泰勒展开,得到如下方程组
(8)
其中
(9)
由于一阶泰勒展开得到的方程组缺少基准,方程组矩阵总是出现列降秩的情况,为了提高准确度,本文运用了二种方式来求得标定系数。方法一:根据阻尼最小二乘法,运用Matlab软件编程实现对方程组的解算,得出加速度计的标定系数[9];方法二:根据方程组(7)和方程组(8)的限制条件,将计算误差小于5 %作为目标状态,运用Isight优化软件,得到标定参数最优解[10]。Isight优化软件寻优如图6。

图6 Isight优化软件寻找最优解Fig 6 Isight optimization software to search the optimal solution
不同试验次数标定误差对比如图7~图9所示。
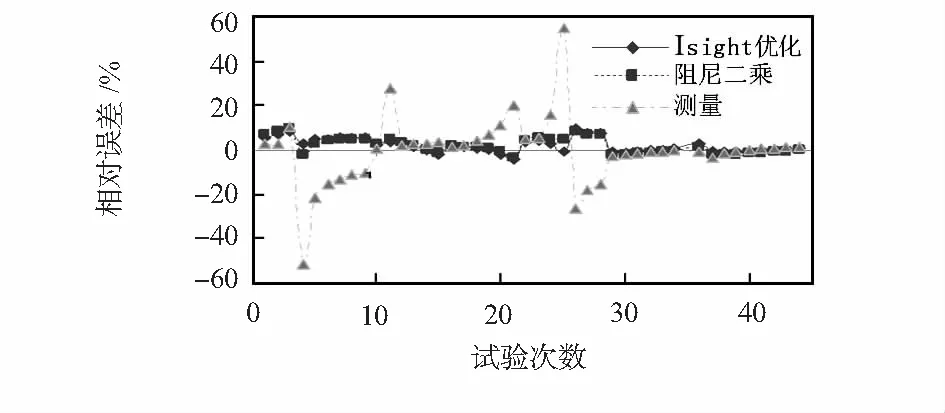
图7 X方向优化误差对比Fig 7 Optimized error comparison of X direction
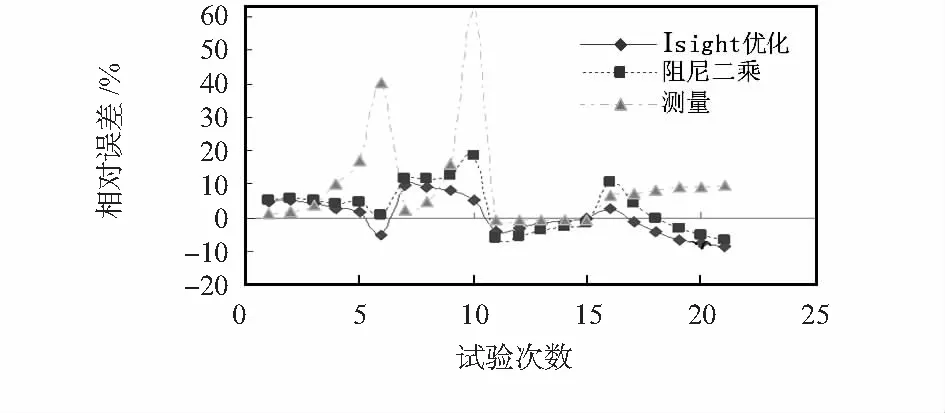
图8 Y方向优化误差对比Fig 8 Optimized error comparison of Y direction

图9 Z方向优化误差对比Fig 9 Optimized error comparison of Z direction
4 结束语
1)通过加速度计的水平面标定试验,可分别得到加速度计在各轴向的测量值,并与理论值相对比,验证了加速度计的有效性;同时,验证了最小二乘算法模型在独立标定中的准确性。
2)水平标定所得参数,由于没有考虑到三轴向的耦合作用,在多角度标定时,会增大标定误差。
3)在多角度标定中,运用阻尼最小二乘法原理通过Matlab软件编程解算得到的试验误差与Isight数据优化得到的实验误差相近,验证了本文所自编的Matlab计算算法的正确性。
[1] 李维嘉,刘 军.用于船舶计程仪速度标定的高精度旋转系统研究[J].机电设备,2006(2):35-38.
[2] 陈 剑,孙金海,李金海,等.惯性系统中加速度计标定研究[J].微电子学与计算机,2012,29(8):131-133.
[3] 刘百奇,房建成.一种改进的IMU无定向动静混合高精度标定方法[J].仪器仪表学报,2008,29(6):1250-1254.
[4] IEEE standard specification format guide and test procedure for linear,single-z-axis,nongyroscopic accelerometers[S].IEEE Std 1293-1998.
[5] 任顺青,冯士伟,马向斌.加速度计的全组合标定[J].中国惯性技术学报,2007,15(6):760-764.
[6] 王志胜,王道波,蔡宗琰.传感器标定的统一数据处理方法[J].传感器技术,2004,23(3):46-50.
[7] 杨亚非,吴广玉,任顺青.提高加速度计标定精度的方法[J].中国惯性技术学报,1998,4(6):98-102.
[8] 任顺青,陈 岩,赵振昊.精密离心机主轴回转误差对加速度计输入精度的影响[J].中国惯性技术学报,2007,15(1):116-119.
[9] 王新洲.非线性模型参数估计理论与应用[M].武汉:武汉大学出版社,2002.
[10] 赖宇阳.Isight参数优化理论与实例详解[M].北京:北京航空航天大学出版社,2012.
Research of calibration method of accelerometer for ship model test*
XIAO Chang-run, LIU Yang, LIU Rui-jie
(Department of Naval Architecture & Ocean Engineering,Naval University of Engineering,Wuhan 430033,China)
In order to simulate output state of acceleration in process of ship model motion,apply combination of static output of accelerometer and dynamic output of rotating-platform rotation to achieve the goal.Using the least square method,damped least square method and Isight data optimization method to process measurement datas and obtain calibration parameters of accelerometers,which makes calibrated accelerometer achieve precision of engineering application.
ship model; accelerometer; calibration,multi-angle
10.13873/J.1000—9787(2014)10—0021—04
2014—07—31
总装预研基金资助项目(51314020203)
U 675.6
A
1000—9787(2014)10—0021—04
肖昌润(1963-),男,湖北武汉人,副教授,硕士导师,研究方向为舰船流体力学,舰船操纵性、舰船水动力性能预报。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2021年12期)2021-03-29
汽车维修与保养(2020年11期)2020-06-09
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年3期)2016-11-07
舰船科学技术(2016年1期)2016-02-27
探测与控制学报(2015年4期)2015-12-15
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
