
基于重复控制的电动加载系统研究
2014-07-07 15:47:34段向东贾建芳
电源技术 2014年5期
段向东,贾建芳
(中北大学信息与通信工程学院,山西 太原 030051)
基于重复控制的电动加载系统研究
段向东,贾建芳
(中北大学信息与通信工程学院,山西 太原 030051)
电动加载系统的优点在于加载跟踪速度快,而消除多余力矩是加载系统保障加载精度的技术关键。常规PID控制难以满足系统准确性和快速性的需求,提出了一种基于重复控制的复合控制策略。建立了电动加载系统的数学模型,给出了电动加载系统的结构图,并采用重复控制器来提高系统的控制精度。仿真结果表明,该方法能够有效地抑制多余力矩,提高系统的跟踪性能。这种控制算法易于实现,具有较强的实用性。
电动加载系统;重复控制;PID控制;多余力矩
电动加载系统是用来模拟飞行器在飞行过程中舵面所受的气动力载荷的装置,它具有结构简单、体积小、能模拟各种加载力矩的优点,主要任务是快速、准确地逼真再现这种气动力载荷。电动加载系统作为被动式力伺服系统,加载电机和加载对象同轴联接,其运动受到加载对象的影响,因此不可避免地存在多余力矩。多余力矩严重影响了加载系统的精度,抑制多余力矩是电动加载系统必须解决的关键问题[1]。
文献[1]采用结构不变性原理及其方法抑制多余力矩,但由于系统的结构刚度、时变特性、非线性等的影响,仅采用该方法抑制多余力矩达不到理想效果。因此将人工智能的方法与反馈控制理论结合,形成具有自学习、自调节能力的控制策略,就成为行之有效的控制策略。文献[2]设计了基于RBF神经网络的直线逆模型控制策略,有效地抑制了多余力矩,提高了系统的动态特性及加载精度。文献[3]提出了基于小脑模型关联控制器(CMAC)的控制策略,CMAC进行前馈控制,PID进行反馈控制,保证了快速实时,同时进一步减小了多余力矩干扰。
大多数电动加载系统采用PID控制方式,它算法简单、动态响应较快,但其稳态输出特性变差,很难保证控制作用最优。近年来提出的重复控制算法则利用控制偏差重复的特点,逐周期地修正输出电压,经过几个周期的重复控制可以极大地提高系统跟踪精度,改善系统的品质。为了提高控制精度及改善控制系统的鲁棒性,本文应用重复控制算法,来达到抑制电动加载系统多余力矩干扰的目的;通过构造重复控制器来提高系统的跟踪精度,同时抑制多余力矩的干扰。
1 重复控制
重复控制是Inoue根据内模原理提出的一种控制方法。它是利用内模原理,在稳定的闭环系统内设置一个可以产生与参考输入同周期的内部模型,从而使系统实现对外部周期性参考信号的渐近跟踪,即加到被控对象的输入信号除偏差信号外,还叠加了上一周期该时刻的控制偏差。把上一周期的偏差和当前的偏差一起叠加到被控对象进行控制,形成所谓的重复控制。重复控制系统不仅可以保证系统的内部稳定条件,而且还可以满足控制对象的输出无稳态偏差地跟踪参考输入、抑制周期性扰动[4]。
图1所示是一种嵌入式重复控制系统,其中,r为系统的输入;u为系统的输出;e为误差信号;d为干扰信号;为低通滤波器;C(s)为补偿器;P(s)为被控对象;为周期延迟环节。
嵌入式重复控制的特点在于重复控制以外挂方式引入稳定的闭环回路控制系统,除易于实现外,重复控制器的设计可独立于系统回路,可同时处理非周期与周期信号的跟踪控制或干扰的抑制。低通滤波器的选择需要考虑两个方面,即保证稳定性和提高系统的精度。为了保证系统的稳定性,不能取为1,只能取为接近于1的数或低通滤波器,虽不能保证系统完全无静差,但跟踪精度足以满足要求。

图1 嵌入式重复控制系统框图
2 基于重复控制的电动加载系统设计
电动加载系统是以转矩为被控量的直流电机伺服系统,采用脉宽调制(PWM)驱动装置,产生大功率电流驱动直流力矩电机对被加载对象加载,加载系统通过连接机构与承载舵机相连,对其加载并随之运动。
电机驱动器采用脉冲宽度调制,PWM控制器的传递函数为:

直流力矩电机的传递函数为:

力矩传感器将电机与被加载对象相连,不考虑传感器的扭转刚度,建立数学模型为:

由上述表达式可得电动加载系统的数学模型,如图2所示。

图2 电动加载系统的结构框图
由数学模型可得电动加载系统的输出力矩为:

为了使系统的控制性能得到提高,把重复控制器嵌入到电动加载系统中,以形成基于重复控制的电动加载系统,如图3所示。图3中的重复控制器主要用来消除输出周期性的跟踪误差,减小系统在负载下的输出畸变。

图3 基于重复控制的电动加载系统的结构框图
3 电动加载系统仿真分析
根据上述数据,采用Matlab7.1进行仿真,得到图4~图6所示的仿真波形。

图4 重复补偿PID控制跟踪曲线

图5 PID控制跟踪误差曲线
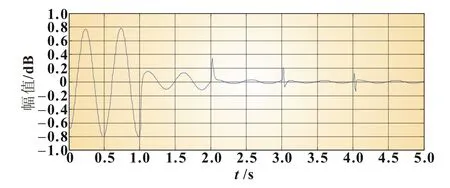
图6 重复补偿PID控制跟踪误差曲线
图4表明电动加载系统经过重复控制2个周期的学习以后,跟踪误差明显减小,理想曲线和实际曲线近似重合,说明重复控制能够更好地跟踪输入信号;并且可以看出,系统对多余力矩的干扰具有很强的鲁棒性,干扰对系统的影响被有效地抑制了。图5表明电动加载系统在常规PID控制下,误差经过多个周期后依然没有减小的趋势,说明常规PID控制跟踪误差能力较差。图6表明系统在重复补偿PID控制下,在经过2个周期的学习后误差明显减小,说明重复补偿PID控制能够更好地跟踪误差。因此,重复补偿PID控制在抑制误差方面明显强于单纯的PID控制,并且明显提高了控制的精度。
4 结论
重复控制通过不断累积误差信息进行反复学习,使控制系统能够跟踪或抑制任意周期或重复信号。本文将重复控制的思想引入到电动加载系统中,通过仿真结果可以看出,重复补偿PID控制能够更好地抑制多余力矩的干扰,提高系统的控制精度,从而实现对电动加载系统的跟踪。
[1]任志婷.小转矩电动式负载模拟器的设计[J].北京航空航天大学学报,2003,29(1):91-94.
[2]沈东凯,华清,王占林.基于神经网络的电动加载系统[J].航空学报,2002,23(6):525-529.
[3]叶正茂,李洪人,王经甫.基于CMAC的电动负载模拟器自学习控制[J].控制与决策,2003,18(3):343-347.
[4]张珂,王生泽,王永兴.基于重复控制的平面可控机构控制系统研究[J].东华大学学报,2006,32(3):52-56.
Research onmotor-driven loading system based on repetitive control
DUAN Xiang-dong,JIA Jian-fang
The advantage of themotor-driven loading system is that it can track the load curvemore quickly.The key technology in loading system is finding an effective method to elim inate surplus torque and enhance loading precision.A composite control strategy based on repetitive control was proposed,while it is difficult for the conventional PID control to satisfy the demand of system for accuracy and speediness.Aim ing at the problem,the mathematic model of the motor-driven loading system was built,and the structure of the motor-driven loading system was offered and a repetitive controller was used to improve control precision of the system.Computer simulation indicated that the method could effectively inhibit the disturbance of the surplus torque and improve tracking performance of the system.The controlarithmetic can be easily realized and hasmore practicability.
motor-driven loading system;repetitive control;PID control;surplus torque
TM 301
A
1002-087 X(2014)05-0962-03

2013-10-30
教育部高等学校博士学科点专项科研基金资助项目(2012420110003)
段向东(1986—),男,山西省人,硕士研究生,主要研究方向为智能控制与扰动补偿。
猜你喜欢
小读者(2021年2期)2021-03-29 05:03:20
能源工程(2020年6期)2021-01-26 00:55:22
山东冶金(2019年3期)2019-07-10 00:54:04
汽车观察(2018年10期)2018-11-06 07:05:28
消费导刊(2018年10期)2018-08-20 02:57:02
车迷(2017年10期)2018-01-18 02:10:46
北京汽车(2017年3期)2017-10-14 02:15:52
山东青年(2016年12期)2017-03-02 18:22:48
光学精密工程(2016年6期)2016-11-07 09:08:02
航天制造技术(2016年6期)2016-05-09 08:32:51
