
通讯技术在电动汽车充电站中的应用设计
2014-07-05 11:33:16孙君光张兴旺赖前程
自动化与信息工程 2014年2期
孙君光 张兴旺 赖前程
(中国电器科学研究院有限公司)
0 前言
电动汽车充电站是电动汽车大规模商业化后不可缺少的能源服务基础设施[1]。建设大量的充电站是推动电动汽车发展的重要条件之一。为实现充电站运行和管理的智能化,满足智能电网对充电站的要求,通讯技术在电动汽车充电站的设计中得到广泛应用。先进、合理的通讯网络、方式、协议的设计能与电动汽车充电站实现现代化、智能化的充电功能相匹配,同时对方便使用和提高充电站的运营效率和智能化管理水平具有重要意义。
1 充电站监控系统整体设计
充电站监控系统的网络结构分为3层,结构图如图1所示。
第1层为充电站中央监控系统,包括数据服务器、Web服务器、监控主机等设备;第2层为配电监控、充电监控、烟雾监视和视频监视4个子监控系统;第3层为现场智能设备[2-4]。根据现场设备的不同,现场设备与各子监控系统间采用CAN现场总线或以太网连接。各子监控系统通过局域网和TCP/IP协议与中央监控管理系统连接,实现对整个充电站的数据汇总、统计、故障显示和监控。

图1 充电站监控系统网络结构组成示意图
2 充电监控系统双CAN通讯网络设计
2.1 充电机监控系统双CAN通信网络
充电机监控系统主要包括充电监控站、充电机、充电桩,以及充电对象—电动汽车。充电机与电动汽车蓄电池管理系统之间的通信网络(CAN1),实现充电机和蓄电池管理系统之间的数据交换;充电机与充电监控系统之间的通信网络(CAN2),实现监控系统对充电机数据的实时采集、监视和控制等功能[5]。
2.2 CAN1的网络组成结构
充电机与蓄电池管理系统的CAN网络(CAN1)包括两个节点,即充电机与蓄电池管理系统(BMS)。
在CAN1网络中还包括一个车载的监控系统,用来监视车载蓄电池的运行状态。发送的信息包括蓄电池的基本信息,蓄电池的电压、温度、荷电状态(SOC)等数据,以便监控系统实时监视蓄电池的工作状态。充电机也根据从电动汽车传送的数据决定最佳的充电策略。CAN1的网络组成如图2 所示。
2.3 CAN2网络组成图
CAN2包括一台监控计算机和若干台充电机。由于CAN总线的负载能力限制了CAN总线的接入数量,每一个CAN总线最多接入30个CAN节点。CAN2网络组成如图3所示[5]。
充电监控系统由一台或多台工作站或服务器组成,包括监控工作站、Web服务器等。这些计算机通过局域网络连接。当充电站的规模较小,充电机数量不多,采用单台监控工作站即可满足监控要求;当充电站的规模较大,充电机数量较多时,可以采用2台或2台以上监控工作站,并根据需要选择配置服务器。
充电监控系统作为充电站监控系统的核心部分,采用CAN2网络与充电机通信,能够实时采集充电机的工作状态、运行参数、故障信息数据,以及动力电池的基本信息、电压、温度、SOC、充电量、故障信息等数据,根据上级系统指令和BMS提供的动力电池信息,调整充电机的充电模式与充电运行参数。
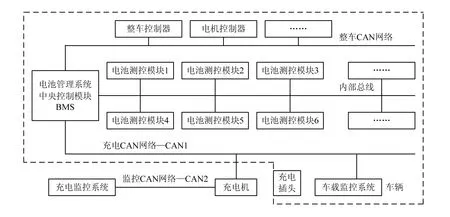
图2 CAN1网络组成图
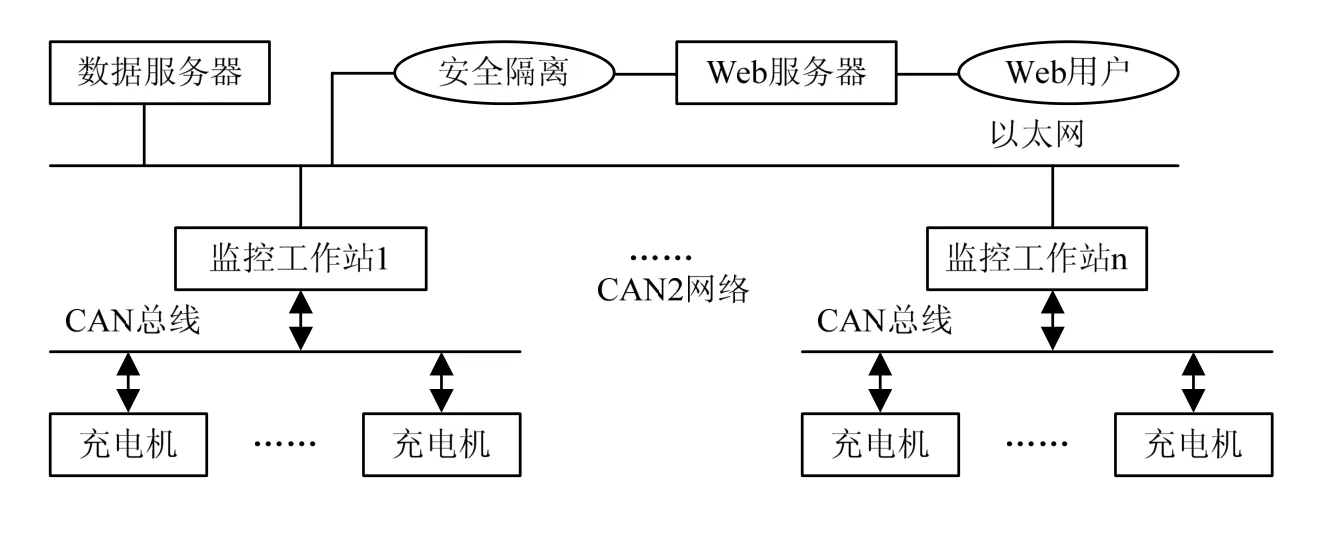
图3 CAN2网络组成图
3 充电设备内部通讯
3.1 非车载充电机通讯设计
大功率非车载充电机除采用双CAN总线与电动汽车和监控系统相连外,其内部通讯包括控制及通讯管理单元与充电模块、人机交互界面、电量计量单元、计费读卡单元的通讯连接图如图4所示。
大功率非车载充电机一般采用多个充电模块并联组成一个充电单元,并通过RS-485连接充电监控与通信管理单元,通讯信息包括控制参数和控制命令及相关状态量等。
人机交互界面采用大屏幕彩色触摸屏,采用RS485通信方式。充电可选择定电量、定时间、定金额、自动(充满为止)4种模式;显示当前充电模式、时间(已充电时间、剩余充电时间)、电量(已充电量、待充电量)及当前计费信息。
读卡器采用R232通信方式,用于身份识别、记录电量消费信息。
电量计量单元,独立的电能计量仪表用于对充电机输入电量、输出电量、电动汽车充电量进行测量,以此进行用电计费、电费结算和成本核算等工作,并把电量信息通过RS485发送到控制及通讯管理单元。
3.2 充电桩
充电桩主要实现对电动汽车充电的交流电源的控制,其内部通讯包括控制及通讯管理单元与人机交互界面、电量计量单元、计费读卡单元的通讯,如图5所示,这些接口及功能与非车载充电机相似。与监控系统相连的方式可以是CAN,也可采用红外通讯及GPRS无线通讯方式。
GPRS通信和红外通信,可根据需要上传充电桩的运行状态参数,并与服务器进行IC卡身份认证。
充电桩除在电动汽车充电站应用外,主要的应用通常为居民小区、停车场、沿街道停车位等较为分散的场所。各分散充电桩通过无线发射、小区组网等方式完成IC卡信息认证及信息传输等。

图5 充电机内部模块通讯设计
4 通讯协议及接口设计
4.1 CAN接口及通讯协议设计
4.1.1 CAN接口设计
CAN接口芯片采用ADI公司的ADM3053,它是一款隔离式CAN物理层收发器,集成隔离DC/DC转换器,符合ISO11898标准。该器件采用ADI公司的iCoupler®技术,将双通道隔离器、CAN收发器和ADI公司的isoPower®DC/DC转换器集成于单个表贴封装中。通讯接口设计如图6所示。
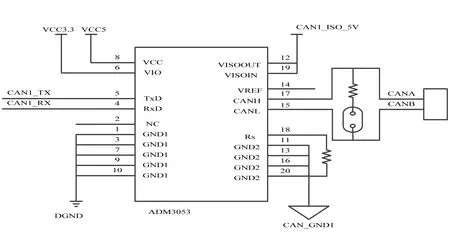
图6 CAN通讯接口设计
4.1.2 CAN通信协议设计
相关行标及国标规定了电动汽车非车载充电机监控单元与电池管理系统(BMS)之间的通信协议,采用CAN2.0(控制器局域网)通信协议。标准规定了参数定义和参数组定义,前者包括数据长度、数据类型、数据分辨率、数据范围等;后者包括数据域长度、传输循环率、数据地址等。设计参见相关标准[4-5],限于篇幅不再赘述。
对于CAN1系统,采用CAN2.0设计,通讯协议根据内部数据量设计。
4.2 串口及通讯协议
4.2.1 串口接口设计
串口接口主要包括RS485和RS232,限于篇幅,本文只给出RS485设计。RS485接口采用ADI公司的ADM2587E芯片进行设计。ADM2587E是隔离型RS485收发器,可配置为半双工或全双工,支持±15 kVESD保护及信号和电源隔离。该器件适用于多点传输线上的高速通信。内部集成隔离式DC-DC电源,无需外加DC-DC隔离模块,节约了成本及减少了设计的复杂度,RS485串行通讯接口设计如图7所示。
4.2.2 串口通信协议设计
通信协议波特率采用19200b/s、8位数据位、1位停止位、无校验。
4.3 以太网接口及通讯协议
4.3.1 以太网接口设计
以太网接口芯片采用美国国家半导体公司的DP83848-单路10/100Mb/s以太网收发器,DP83848是一款强大的全功能10/100单端口物理层器件,实现了低功耗,包括几种智能掉电状态。这些低功耗模式通过降低功耗提高了产品的整体可靠性。支持多种智能功率模式,从而可以在应用中使用最少量的工作所需电量。以太网接口设计如图8所示。
4.3.2 以太网通信协议
以太网通信协议采用标准TCP/IP和UDP协议。
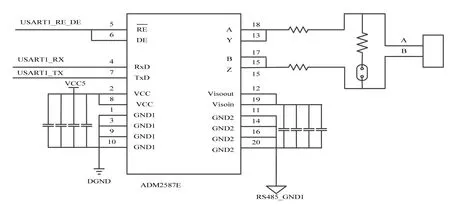
图7 RS485串行通讯接口设计
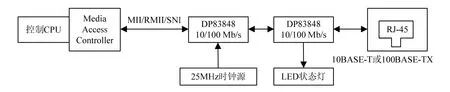
图8 以太网接口设计方案
5 结语
为满足现代充电站建设、使用和维护的需求,通讯技术在充电系统中占据极其重要的地位。提出的充电站3层充电站监控系统及其通讯整体设计方案,根据不同层次数据特点和使用需求,结合当前主流通讯技术,融合了不同通讯网络及协议,很好地满足应用要求。结合国内外充电机相关标准,提出的充电机双CAN通讯方案,并在实际的系统研发中得到应用。提出的充电机、充电桩内部通讯方案,则结合了充电机功能及控制特点,兼顾了对外接口的统一和满足标准要求。通讯方式及通讯协议的选取,考虑了不同通讯方式的特点及内部子系统的接口要求,对装置和设备的研发有积极的参考作用。
[1]陈清泉,孙逢春,祝嘉光.现代电动汽车技术[M].北京:北京理工大学出版社,2002:289-296.
[2]冯冬青,赵洪蕊,王迎迎.电动汽车充电站智能监控管理系统设计[J].计算机测量与控制,2011,19(7):1609-1621.
[3]王斌,张维戈,姜久春,等.电动车充电站充电机监控系统设计方案[J].计算机与网络,2008(11):48-50.
[4]严辉,李庚银,赵磊,等.电动汽车充电站监控系统的设计与实现[J].电网技术,2009,6(12):15-19.
[5]国家电网公司营销部.电动汽车充电设施建设标准及相关文件[M].北京:中国电力出版社,2010.
猜你喜欢
小学生作文·小学低年级适用(2024年4期)2024-05-23 17:59:55
环球时报(2020-12-08)2020-12-08 05:17:49
房地产导刊(2020年6期)2020-07-25 01:31:26
电子测试(2018年13期)2018-09-26 03:29:16
成都信息工程大学学报(2017年5期)2018-01-23 02:45:38
广东石油化工学院学报(2016年6期)2016-05-17 05:17:26
电测与仪表(2016年2期)2016-04-12 00:24:52
通信电源技术(2016年4期)2016-04-04 02:57:10
自动化博览(2014年9期)2014-02-28 22:33:16
铁路通信信号工程技术(2014年1期)2014-02-28 16:55:19
- 自动化与信息工程的其它文章
- 不同安装方式对压电加速度计灵敏度的影响
- 局部线性嵌入算法及其稳定性实现