ModbusTCP通讯协议在高温MOCVD控制系统中的应用
2014-07-04 01:42:44何华云林伯奇胡晓宇
电子工业专用设备 2014年12期
何华云,林伯奇,胡晓宇
(中国电子科技集团公司第四十八研究所,湖南长沙410111)
MOCVD (Metal-organic Chemical Vapor Deposition)是一种有机金属气相沉积法,通常是以III族、II 族元素的有机化合物和V 族、VI 族元素的氢化物作为源材料,在真空腔里热分解后,在衬底表面形成各种III-V 或II-VI 化合物薄层材料,广泛应用于光电子材料和器件等研究和生产中[1]。
目前市场上用于量产的MOCVD 设备全部依赖进口,主要来自德国Aixtron 和美国的Veeco,由于GaN/AlGaN 基材在军事上的特殊用途,使得能够生长AlGaN 材料的高温MOCVD 设备受到西方国家的禁运,国内高温MOCVD 设备的研究尚属空白,研制具有自主知识产权的高温MOCVD 设备有着非常重要的意义。
中国电子科技集团公司第四十八研究所2002年起开始致力于GaN 基材料生长用MOCVD 设备,2013年自主研发了一台19 片的M8453-3/UM型高温MOCVD 设备(如图1所示),用于制备GaN 发光二极管及大功率激光器所需的GaN/Al-GaN 系外延材料。

图1 高温MOCVD 整机照片
1 高温MOCVD 控制系统概述
MOCVD 设备控制系统比较复杂,通常包括衬底传送(机械手,手套箱或传送室)、衬底旋转、衬底温控(加热和在线监测)、气路、真空、安全联锁等子系统。高温MOCVD 和普通的MOCVD 设备的系统组成并无差别(系统组成原理如图2所示),其特殊性主要体现在最高生长温度为1 450 ℃,而普通的MOCVD 设备均在1 250 ℃以下。
为适应系统中各种部件和外围检测仪表的连接,系统布线简单、传输速度快、抗干扰能力强。MOCVD 控制系统通常设计为基于TCP/IP 协议的快速以太网拓扑结构,可包含Modbus TCP、DeviciNet、RS485 等多种协议。
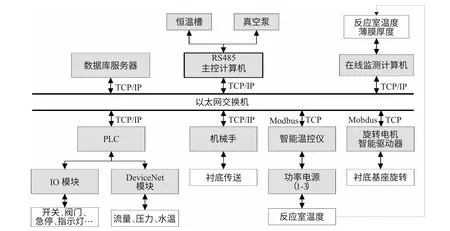
图2 MOCVD 系统组成原理
MOCVD 工艺对气氛和温度非常敏感,衬底表面的层流气氛、组分以及衬底温度控制精度、均匀性,是保证外延材料质量的关键。
为了保证衬底旋转速度稳定及平滑升/ 降速,旋转控制器选用进口伺服智能驱动器,实现了衬底旋转最大速度1 200 r/min,并通过起始速度、加速度、减速度及旋转方向的在线修改,实现对转速斜率上升/下降的灵活控制。
衬底温度由在线监测计算机、主控计算机和智能温控仪实现闭环控制,以保证衬底温度均匀性控制在±1 ℃。温控仪内部控制器配置有多路电流采集模块、电压采集模块、输出控制模块,实时采集加热电源的电流、电压信息,通过输出模块实现对加热电源功率的线性控制;温控仪设置有双回路,可预存多组PID 参数,可针对每组PID 设定其功率输出上、下限;另外,根据温控仪内部提供的软连线功能,可灵活将电压、电流、电阻、温度和材料等特性参数进行关联,实时计算加热器当前电阻、当前温度,并依据相关特征参数设置多重报警,保证设备运行安全可靠。
主控计算机需根据不同的工艺步对旋转驱动器进行速度、加速度、减速度、使能、报错、驱动模式等数据进行设定和监测;定时读取温控仪内的电压、电流、电阻、设置温度、当前温度及控制模式等数据;定时对温度进行设定,并通过对控制模式的修改,将当前控制方式设定为开环控制、回路一闭环控制、回路二闭环控制。为了满足主控计算机对旋转驱动器及多路温控仪的多个参数读写的通讯要求,我们采用了Modbus TCP 以太网协议。
2 Modbus TCP 协议
Modbus TCP 协议具有以太网的通信速度,能满足主控计算机对多路控制器多个参数快速读写的要求[2],且要求的布线简单(网线+ 交换机),是一种理想的MOCVD 控制系统解决方案。Modbus TCP 通信协议是基于Modbu 协议的主机/ 从机(Master/Slave)通信机理,与互联网(Internet)客户机/服务器(Client/Server)的通信机理相对应,即Modbus 协议中的主机为Modbus TCP 协议中的客户端(主控计算机),从机为Modbus TCP 协议中的服务器(旋转驱动器、智能温控仪)。
Modbus TCP 协议是施耐德公司推出的基于TCP/IP 的以太网通信协议,与传统的OSI 模型相比,Modbus TCP 协议网络模型中没有表示层和会话层,而在应用层采用Modbus,在传输层采用TCP 协议,网络层采用IP 协议。将Modbus 与TCP/IP 相结合,在TCP 帧中嵌入Modbus 信息帧,去掉Modbus 信息帧中的差错校验,再在Modbus信息帧前添加7 个字节的报文头,组成Modbus TCP 协议信息帧,如图3所示。
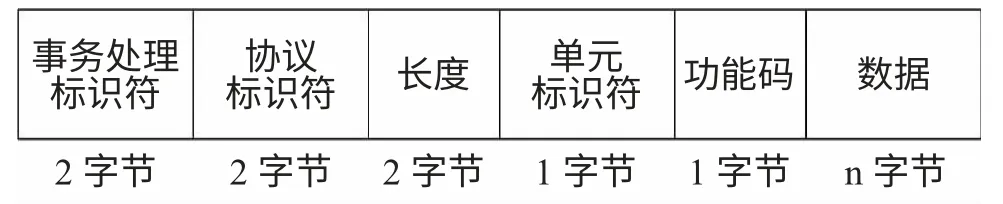
图3 Modbus TCP 协议信息帧格式
3 Modbus TCP 通信实现
3.1 编程环境及通讯端设置
主控计算机使用Visual Basic 6.0 编程环境,采用套接字控件Winsock 与其它控制器进行通讯。Winsock 控件是基于Windows 操作系统的套接字网络编程接口,可以方便地实现主控计算机与其它控制器“点对点”通信。“套接字”的实质是在IP 协议的基础上以TCP 或UDP 规范进行信息交换,建立双方通信的过程即称建立一个“套接字”,进行各种信息的交流。
主控计算机利用IP 地址与各控制器建立TCP 连接,而Modbus TCP 协议规定每个控制器还必须有自己的单元地址(在控制器端设置),这个单元地址与IP 地址一样,也是唯一的,用于构成信息帧,其取值范围为0~255。
3.2 Modbus TCP 通信实现
利用旋转驱动器配置的专用测试软件Work-Bench,测试主控计算机与智能驱动器的Modbus TCP 连接是否成功,并获取所需的各控制参数地址,进行驱动稳定性实验;然后利用智能温控仪配置的ITools 软件,测试主控计算机与温控仪的PID 控制器是否连接成功,获取所需的各控制参数地址。主控计算机与控制器之间的完整通信过程如图4所示。
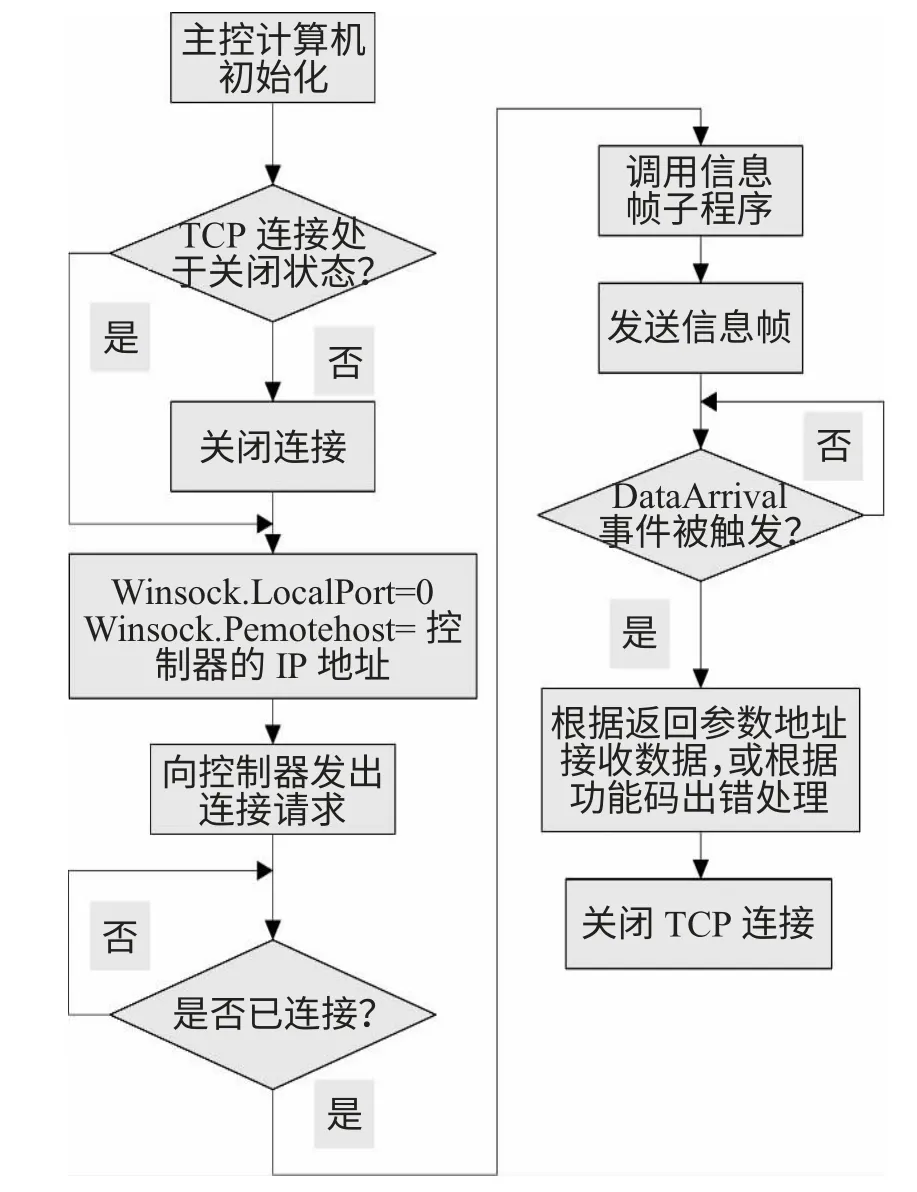
图4 主控计算机与控制器通信过程
3.3 读控制器参数子程序示例
Private Sub ReadFromController(单元识别号,参数地址)
Dim byte_Out(0 to 11) as byte
byte_Out(0) = &H0 ' 事务处理标识符高/ 低字节-由服务器复制,通常为0
byte_Out(1) = &H0
byte_Out (2) = &H0 ' 协议识别号高/ 低字节,为0
byte_Out(3) = &H0 '
byte_Out(4) = &H0 ' 长度字段高字节(所有的消息长度小于256 字节)
byte_Out(5) = &H6 ' 长度字段低字节,等于此数组此字节后续的字节个数
byte_Out(6) = &H1 ' 单元识别号(根据实际情况进行修改)
'上述信息为7 个字节的Modbus TCP 报文头
byte_Out (7) = &H3 ' 读多个寄存器命令功能码
byte_Out (8) = "&H" + 4 位16 进制参数地址的高字节
byte_Out (9) = "&H" + 4 位16 进制参数地址的低字节
byte_Out (10) = &H0 ' 参数值的数据长度信息高字节
byte_Out (11) = &H1 ' 参数值的数据长度信息低字节
End Sub
3.4 写控制器参数子程序示例
Private Sub WriteToController(单元识别号,参数地址,所写数据)
Dim byte_Out(0 to 16) As Byte
byte_Out(0) = &H0 '事务处理标识符高/ 低字节-由服务器复制,通常为0
byte_Out(1) = &H0
byte_Out (2) = &H0 ' 协议识别号高/ 低字节,为0(表示Modbus/TCP 协议)
byte_Out(3) = &H0
byte_Out(4) = &H0 ' 长度信息高字节(所有的消息长度小于256 字节)
byte_Out(5) = &HB ' 长度信息低字节,等于数组此字节后续的字节个数
byte_Out(6) = &HFF '单元识别号
'上述信息为7 个字节的Modbus TCP 报文头
byte_Out (7) = &H10 ' 此处为写多个字功能码,可根据实际情况修改
byte_Out (8) = 4 位16 进制参数地址信息的高字节
byte_Out (9) = 4 位16 进制参数地址信息的低字节
byte_Out(10) = 写寄存器个数信息高字节
byte_Out(11) = 写寄存器个数信息低字节
byte_Out(12) = 写数据字节个数信息(2* 寄存器个数)
' 将需写入的数据转换为4 字节的16 进制信息
byte_Out(13) = &H00 ' 以写十进制值1234 为例(转换为16 进制值为&H000004D2)
byte_Out(14) = &H00
byte_Out(15) = &H04
byte_Out(16) = &HD2
End Sub
4 结束语
目前,M8453-3/UM 型高温MOCVD 设备已经研发完成,在蓝宝石衬底和Si 衬底上成功生长出AlN/AlGaN 材料,应用于HEMT 功率开关和LED器件上,并扩展应用到紫外LED 和日盲探测器的研究中。
[1]过润秋,陈贤能.基于PLC 的MOCVD 计算机控制系统设计[J].微计算机信息.2007,23(5-1):25-27.
[2]尹静涛,董会.Modbus/TCP 协议在高炉监测网络中的应用[J].中国科技信息.2009(21):144.
猜你喜欢
销售与市场(营销版)(2021年10期)2021-11-21 20:15:03
中国交通信息化(2021年1期)2021-06-11 01:23:50
销售与市场(营销版)(2019年6期)2019-06-21 01:16:38
网络安全技术与应用(2017年9期)2017-09-20 09:54:28
中国科技信息(2016年6期)2016-08-31 07:27:16
中国科技信息(2015年24期)2015-11-07 08:52:23
中国科技信息(2015年23期)2015-11-07 08:25:56
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17
自动化博览(2014年4期)2014-02-28 22:31:15