农业车辆电控液压转向系统的设计
2014-07-02 01:25沈文龙薛金林张永
湖南农业大学学报(自然科学版) 2014年3期
沈文龙,薛金林*,张永
(1.南京农业大学工学院,江苏 南京 210031;2.江苏省智能化农业装备重点实验室,江苏 南京 210031)
农业车辆电控液压转向系统的设计
沈文龙1,2,薛金林1,2*,张永1,2
(1.南京农业大学工学院,江苏 南京 210031;2.江苏省智能化农业装备重点实验室,江苏 南京 210031)
以茂源250型拖拉机为试验平台,设计一种用于农业车辆自主导航的电控液压转向系统。该系统使用电控比例液压阀、换向阀和溢流阀,改造拖拉机的液压转向油路;采用STC12C5A60S2作为比例阀的控制器,同时加装角度传感器作为系统的反馈。将带有死区的PD控制算法在SimHydraulics建立的液压转向系统模型上进行仿真,并实车试验验证。在左、右极限转向和4种特定目标角度转向试验中,该系统比原有系统响应时间快0.2 s,超调量在5%以内。
农业车辆;液压转向系统;电子控制单元
利用自动转向控制系统实现农业车辆自主导航,可使农业车辆在田间作业时更快、更精准[1]。与手动转向系统相比,提高了工作效率和安全舒适性,降低了劳动强度和人力成本[2]。
车辆自动转向主要有电机转向控制和电液转向控制2种。华南农业大学采用步进电机通过链条传动带动方向盘转动实现转向操作[3–6];美国伊利诺斯州立大学通过对拖拉机转向系统的改造,开发出电液操控系统[7–8]。笔者以茂源250型拖拉机为研究平台,设计一种用于农业车辆的电控液压转向系统,不仅能够避免链条传动的滞后性和不稳定性,而且能保证自动与手动转向系统的切换。利用Matlab/Simulink的SimHydraulics模块建立了电控液压转向控制系统模型,对其进行了仿真,并进行实车试验,根据结果分析该系统的响应特性。
1 系统结构
电控液压转向系统主要由两大部分组成(图1):①液压系统,包括电控比例液压阀、换向阀、溢流阀和改造后的油路;②控制单元,包括控制器(ECU)及外围电路和上位机(计算机)。
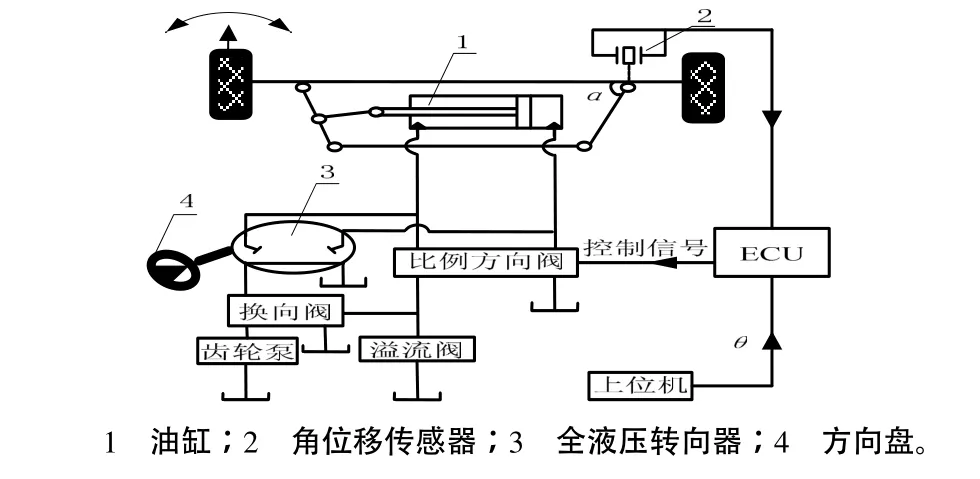
图1 转向系统结构Fig.1 Sketch of the steering system structure
系统根据上位机发出的转向信号(期望转角θ)和角度传感器实时检测到的角度信号(实际转角α)的差值e(偏差信号),由控制器计算出控制量,通过电压信号控制模块将数字值转换成实际电压值供给比例换向阀,进而控制比例阀的开口方向和大小,以减小偏差值。控制器反复进行这一过程,从而驱动油缸位移,带动前轮(转向轮)转向机构转向,使前轮快速达到期望转角。闭环控制系统如图2所示。

图2 电控液压闭环控制系统Fig.2 Block diagram of electric hydraulic power steering control system
2 系统硬件
2.1 电控液压转向机构
根据不同的驾驶需要和突发安全性的考虑,转向系统应具有自动转向和人工转向模式,且2种模式的切换应简单、快捷。为此,所设计的转向控制系统在原有转向系统的基础上,并联安装了一套转向控制机构(图3)。作后,油泵泵出的液力传动油经过油滤输送给三位四通比例换向阀,实现自动转向。三位四通比例换向阀的作用是根据控制器给出的控制信号,控制比例阀开口方向和大小,将液压油输入转向油缸的左或右腔,推动前轮转向。溢流阀主要起定压溢流的作用,保护整个油路。
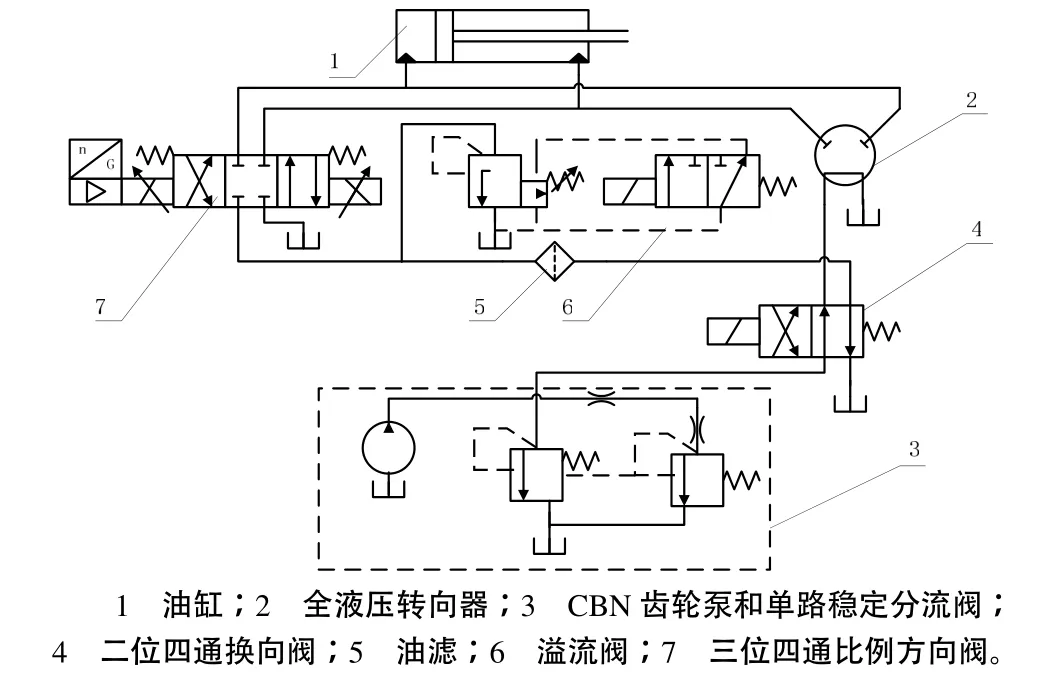
图3 改造后的转向控制系统Fig.3 Oil circuit of reconstructed steering system
转向系统动力装置由CBN–E306齿轮泵提供6.3 L/min恒流油源[9]。二位四通换向阀的作用是切换油源流向,未通电时,将油泵泵出的液力传动油供给全液压转向器,通过方向盘实现手动转向;通电工
2.2 转向控制器
控制器是电控液压转向系统的核心,应具备3项要求:一是能接受上位机传来的转向信号和采集传感器检测到的实际角度信号并进行处理,即上、下位机之间通信和传感器模拟信号转换成计算机能够处理的数字信号;二是能根据转向信号和实际角度信号,按照事先编好在单片机中的程序,输出控制量;三是将单片机输出的数字控制量转换成可以驱动比例液压阀的电压量。根据需要,选用STC12C5A60S2单片机作为控制器,具有8路10位A/D转换器[10]。
采用力士乐4WREE系列的一款电控比例换向阀,控制电压为–10~10 V,电压值的正负控制阀芯左或右移,电压值的大小决定阀芯开口大小。根据该电液阀的工作要求,制作能够与控制器配合的D/A模块,它能将数字控制量转换成±10 V的电压值。车辆改造后,若控制电压为负,则前轮左转;若控制电压为正,则前轮右转。
2.3 角度传感器
电控液压转向控制系统采用WYH–3型无触点角度传感器来检测前轮的转角,并将其反馈到控制器中,形成一个闭环控制系统。该传感器可将机械转动转换为0.5~4.5 V的电信号输出,供单片机A/D口直接转换。角度传感器安装在一个亚克力板制作的平台表面。该平台固定在前桥的横梁上保持静止面。传感器的转轴与转向节立轴刚性联结,当转向横拉杆带动转向臂转动时,传感器转轴同步运动,从而可以测得前轮的角度。
3 转向控制算法及SimHydraulics仿真
拖拉机自身机构和液压阀特性,转向存在较小角度死区[11]。为避免频繁转向,增加系统的稳定性,在死区范围内即认为转向轮已经达到预定期望。传统的PID控制中,积分I 控制环节的作用是通过累加系统的偏差值消除系统的绝对误差,会使死区失去其意义,造成系统转向振动,因此选择带死区的PD 控制算法作为系统的控制策略。
由PD算法决定的D/A输出值outV 与各参数关系参照文献[12]。

式中:Vout为D/A输出值;Kp为比例系数;Kd为微分系数;e(k)、e(k–1)为第k次的偏差值和第k–1次的偏差值。
经过试验,得到死区角度为1.5°。控制算法的程序流程图如图4所示。
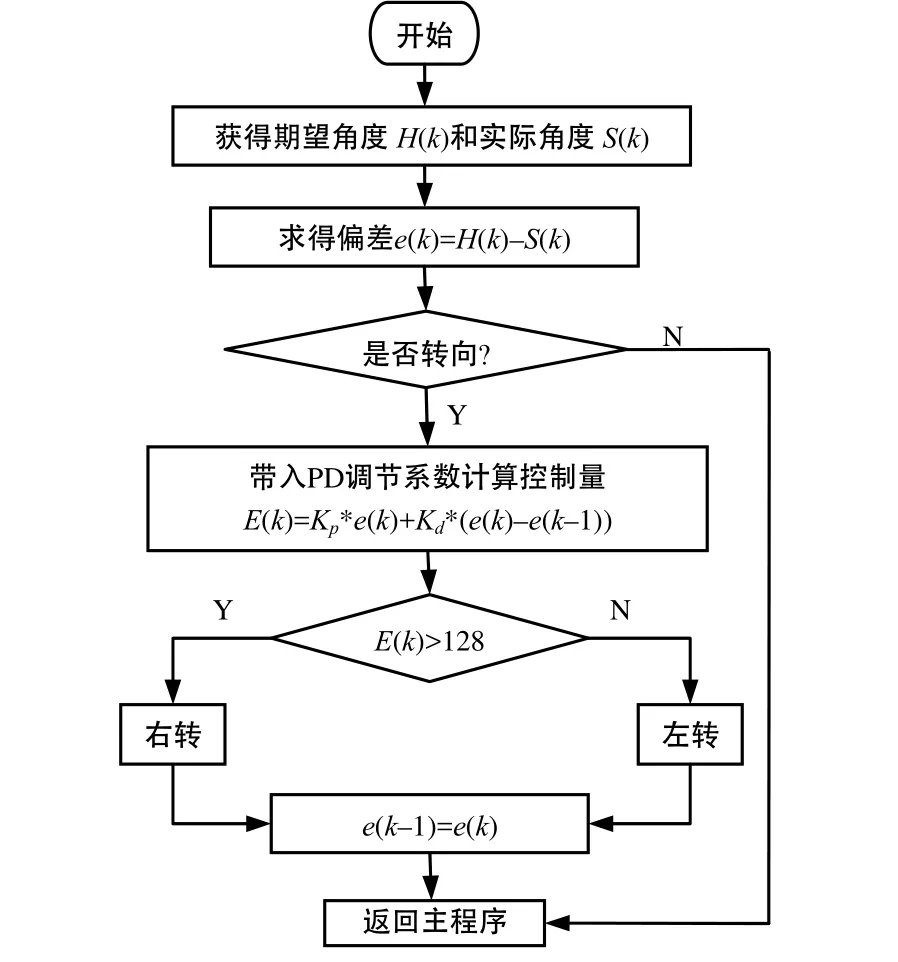
图4 PD控制算法程序流程Fig.4 Flow chart of the PD control program
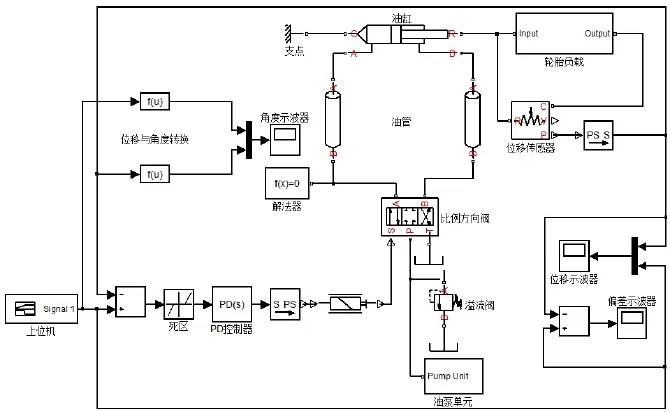
图5 SimHydraulics仿真框图Fig.5 Simulation block diagram of SimHydraulics
SimHydraulics搭建的电控液压转向系统仿真框图,全部仿真工作在单一环境下进行,避免简化数学模型精度不足或者AMEsim和Simulink联合仿真耗时过长[13–14]。系统的仿真框图如图5所示。主要由信号发生器、PD控制器、电控液压系统元件模型、轮胎负载模型、位移传感器、位移与角度转换模块等组成。信号发生器模拟产生上位机发出的转向角度指令,经过PD控制器计算比例方向阀的控制量。电控液压元件模型包括恒压油源模块(主要由CBN–E306型齿轮泵组成)、比例阀(4WREE10E75–22/G24K31/A1V型)、溢流阀(DBW10B1–52/3.15–6EG24N9K4型)、油管和油缸(缸径50 mm、杆径25 mm)等。轮胎(5.00–15型农用车轮胎)负载模块施加在油缸杆上,位移传感器测量油缸杆的位移,经过位移和角度转换模块,示波器观测油缸运行实时状态、前轮转角运行曲线等。
位移与角度转换模块中的转换函数由试验标定而得。
将上述元件参数和标定关系输入仿真框图中,控制信号设置为10°,分别以无算法控制和PD算法控制作为控制策略,仿真结果如图6所示。
由图6可知,当Kp=0.25、Kd=0.01时,仿真曲线光滑平稳,在0.234 s达到稳定。此时的PD系数能使前轮较快地转向目标角度,同时防止出现超调现象,在小误差范围时尽可能保持稳定,避免抖动。尽管SimHydraulics可快速有效地检验系统,但其底层仍建立在理想的数学模型上,元件和负载等工作的实际情况,需要实际试验来检验PD系数的有效性。通过试验,确定Kp=0.35、Kd=0.02时,在0.52 s前轮达到10°期望转角,此时超调量在允许范围内,工作平稳,往复摆动现象基本消失。
4 电控液压转向控制系统的台架试验
为了检验转向系统是否工作平稳、准确,将茂源250型拖拉机的前转向轮支起,忽略路况的影响,分别进行2项试验。
试验1,分别在手动和自动转向的工作模式下,记录转向轮向左、右极限转向时的运动过程。在手动模式下,驾驶员尽最大努力由一侧极限向另一侧极限转动方向盘,控制转向轮转向;在自动模式下,上位机发送极限位置命令,控制器控制转向轮转向。
试验2,通过上位机发送4个特定角度(±10°、±20°)给控制器,控制器分别在无算法和带有死区的PD算法情况下发出控制命令,记录转向轮运动过程。

图7 手动和自动工作模式下的转向特性Fig.7 The steering characteristic curve of manual and automatic modes
试验结果表明,在手动转向模式下,转向过程有较为明显的振荡;在电控液压系统的自动模式下,过程平顺、无振荡,且用时均减少约0.2 s(图7)。说明该系统不仅可以替代人工手动操作,而且具有较好的稳定性;在无算法的情况下,转向过程超调量较大,轮胎剧烈往复摆动;在带有死区的PD控制算法情况下,轮胎没有明显的往复运动,平均摆动次数1~2次(图8),超调量均保持在5%以内,峰值时间在1 s内,可以达到准确、稳定的要求。
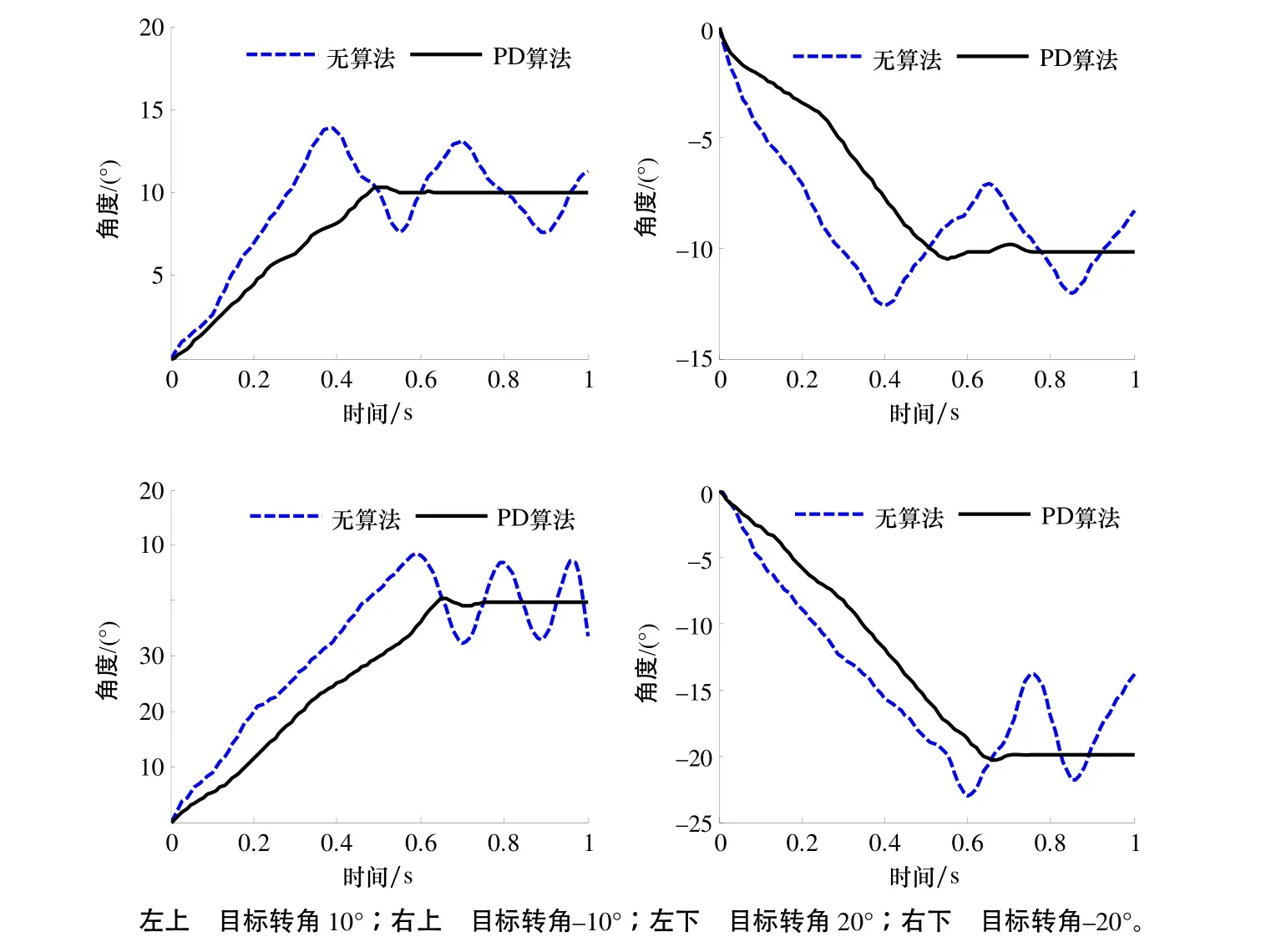
图8 特定目标转角的转向特性Fig.8 The steering characteristic curve of target angle
1323–1330.
[9] 吕白.CBN型齿轮泵[EB/OL]//http://wenku.baidu.com/ view/f897190303d8ce2f0066231a.html.2011–01–17.
[10] 宋凤娟,付侃,薛雅丽.STC12C5A60S2单片机高速A/D转换方法[J].煤矿机械,2010,31(6):219–221.
[11] 陈文良.拖拉机自动驾驶转向控制系统的研制[D].北京:中国农业大学,2006.
[12] 赵建东,安秋,姬长英,等.基于东方红–SG250拖拉机的自动转向控制系统设计[J].江苏农业科学,2013,41(4):349–351.
[13] 孟亚东,李长春,刘晓东,等.基于SimHydraulics的电液伺服系统实物仿真[J].系统仿真学报,2009,21(6):1596–1598.
[14] 李洪运,卓桂荣.基于SimHydraulics的制动防抱死系统仿真分析[C]//计算机集成制造系统编辑部.2010全国现代制造集成技术(CMIS)学术会议论文集.北京:计算机集成制造系统编辑部,2010:330–340.
[15] 齐晓杰.汽车液压与气压传动[M].北京:机械工业出版社,2009.
责任编辑:罗慧敏
英文编辑:罗 维
[1] 闫树兵,姬长英.农业机器人移动平台的研究现状与发展趋势[J].拖拉机与农用运输车,2007,34(5):13–15.
[2] 许仰曾,刘忠华,张天福,等.液压转向器的电控与信息化发展趋势[J].流体传动与控制,2004(3):1–3.
[3] 张智刚,罗锡文,李俊岭.轮式农业机械自动转向控制系统研究[J].农业工程学报,2005,21(11):77–80.
[4] 吴晓鹏,赵祚喜,张智刚,等.东方红拖拉机自动转向控制系统设计[J].农业机械学报,2009,40(S1):1–5.
[5] 陈文良,谢斌,宋正河,等.拖拉机电控液压动力转向系统的研究[J].农业工程学报,2006,22(10):122–125.
[6] 陈文良,宋正河,毛恩荣.拖拉机自动驾驶转向控制系统的设计[J].华中农业大学学报,2005,24(10):57–62.
[7] QiuH,ZhangQ.Feedforward-plus-proportional-integralderivative controller for an off road vehicle electrohydraulic steering system[J].Proc Instn Mech Engrs,2003,217(5):375–381.
[8] Zhang Q,Reid J F,Wu D.Hardware-in-the-loop simulator of an off-road vehicle electrohydraulic steering system[J].Transactions of the ASAE,2000,43(6):
Development of electro-hydraulic steering system based on agricultural vehicle
SHEN Wen-long1,2, XUE Jin-lin1,2*, ZHANG Yong1,2
(1.College of Engineering, Nanjing Agricultural University, Nanjing 210031, China; 2.Key Laboratory of Intelligent Agricultural Equipment in Jiangsu Province, Nanjing 210031, China)
An electro-hydraulic steering system of agricultural vehicle was designed for automatic navigation based on a Maoyuan-250 tractor. An electro-hydraulic proportional valve, a directional valve and a relief valve were used to reconstruct the oil circuit of the original steering system of the tractor. And the electro-hydraulic proportional valve was controlled by a STC12C5A60S2 while an angle sensor was applied for feedback. A steering model based on PD control algorithm with dead zone was established by SimHydraulics, and experiments about left-and-right limit and four specific target angles were conducted on the real vehicle. The tests showed that the response time was reduced by 0.2 s and the overshoot was controlled within 5% compared with the original system.
agricultural vehicle; electro-hydraulic steering system; electronic control unit (ECU)
S219.032.3
A
1007−1032(2014)03−0325−05
10.13331/j.cnki.jhau.2014.03.020
投稿网址:http://www.hunau.net/qks
2013–11–29
中央高校基本科研业务费专项(KYZ201127)
沈文龙(1988—),男,江苏淮安人,硕士研究生,主要从事车辆自主导航研究,shen_wenlong@126.com;*通信作者,xuejinlin@njau.edu.cn
猜你喜欢
小学生学习指导·爆笑校园(2019年6期)2019-09-10
电子制作(2016年19期)2016-08-24
工业炉(2016年6期)2016-04-10
红蜻蜓·低年级(2015年11期)2016-02-02
汽车实用技术(2015年8期)2015-12-26
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17
液压与气动(2015年6期)2015-04-16
中国自行车·骑行风尚(2014年4期)2014-10-10
武夷学院学报(2014年5期)2014-07-19