基于污染物排放的区域交通信号控制模型
2014-07-01 01:13詹娟张慧邵静静
河南科技 2014年4期
詹娟 张慧 邵静静
(重庆交通大学交通学院,重庆 404100)
基于污染物排放的区域交通信号控制模型
詹娟 张慧 邵静静
(重庆交通大学交通学院,重庆 404100)
为了对区域交通进行有效控制,并减少车辆尾气排放造成的环境污染,本文提出了基于污染物排放的区域信号控制模型,通过模拟仿真进行了验证,表明该方法对于区域交通控制和减少环境污染具有重大意义。
区域交通控制;污染物排放;控制模型
随着城市的发展,城市交通问题日益突出和严重,加强城市的交通管理和控制,整治城市各项交通问题迫在眉睫。随着计算机技术和自动控制技术的发展,城市交通控制的规模也逐渐从点控、线控向面控发展。关于区域交通控制系统的模型、算法都有大量的研究成果,但是却几乎没有任何研究将城市区域的环境污染与区域控制相结合。由机动车尾气排放引起的大气污染已经严重影响了城市居民的生活和健康,尤其是在交通流量大、道路情况复杂、交叉口集中地区域,由于交通拥堵和延误,车辆不停地反复加减速和怠速所排放的污染物浓度极大,对城市环境造成了严重污染,影响居民的生活质量。
1 污染物排放
机动车排放污染物主要包括一氧化碳、氮氧化物、碳氢化物和少量二氧碳,其中对人体伤害较大的是CO、CH和NOX,本文主要研究这三种污染物的排放。交叉口汽车行驶和怠速时的尾气排放情况不相同,所以,由此造成的污染物排放也不相同[1]:一是车辆在交叉口区域道路上正常行驶时的尾气排放量;其二是车辆在所有进口道怠速时的尾气排放量。

其中,s为污染物类型(s=1,2,3);u为车辆类型;EFpcuS为污染物s换算成标准小汽车的排放因子g/(puc·km);EFIpcuS为污染物换算的标准小汽车的怠速排放因子g/(puc·km);EFSm为u型车的s型污染物的排放因子g/(veh·km);EFISu为u型车的s种污染物的怠速排放因子g/(veh·km);au为u型车在交通量总量中的比例;pu为u型车的换算系数,取值参考《城市道路设计规范》(1995)。
因此,车辆在区域内的一个信号交叉口的尾气排放总量Es为行驶排放和怠速排放之和。
其中:PR为行车线源污染物排放量(g/h);EFijk为第n条车道的u型车s种污染物的排放因子(g/(辆·km));xnm第n条车道的u型车的交通量辆/h);Ln交叉口进出口路段宽度(km);j交叉口车道总数。
其中:PI为车辆怠速产生的污染物排放量(g/h);EFIijk为第n条车道的u型车的s种污染物的怠速排放因子(g/(辆·km));xnu为第n条车道的u型车的交通量(辆/h);dn为第n车道的平均停车延误(s)。
2 延误的计算
车辆平均延误:第i个交叉口的平均车辆延误,等于该交叉口各个进口道延误的加权平均值[2],区域平均延误等于各交叉口平均延误的加权平均值。
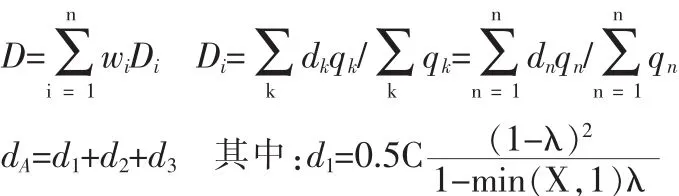
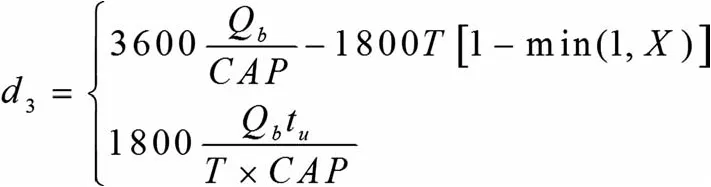
由于两者的量纲不同,将两者做线性归一化处理,根据重要性按比例叠加,建立交叉口延误最小和污染最小的多目标规划模型,约束条件为两者的约束条件,即可得到以下模型:

E和E0是区域路网中机动车尾气排放的实际值和初始值,D和D0是区域车辆平均延误的实际值和初始值,G为加权系数。L为相位,Xl为相位l的饱和度,x=(…,xk,…)为决策变量的向量,路段的交通流量。
3 粒子群算法
Step1:初始化。确定微粒编码xi={x1,x2,x3,x4},xi代表相位的绿灯时间,初始化粒子群,初始化各微粒的位置xi及速度vi,粒子个数Num、惯性因子ω(0≤ω≤1)的初值、最大允许迭代步数G等值、学习因子c。
Step2:适应值选择。作为适应度函数minf(x),按公式计算出每个粒子的适应度值。
Step3:微粒进化,对粒子群中每个粒子与全局所经历的最好位置gbest作比较,并检验这个粒子的可行性条件,如果这个粒子的适应值较好且满足约束条件,则将其设为gbest。
Step4:标准粒子群最优解。当最优粒子的适应值足够好或进化代数达到预定代数时,算法终止并输出该最优粒子。否则重新初始化速度和位置并重新设定适应值,直至得出最优粒子,最后将最优粒子解码为最佳配时优化算法。
4 实例分析
4.1 确定交叉口权重
选取最典型的井字型区域交叉口进行实例分析,根据如图所示实际路网的历史交通数据,以及非高峰小时和非高峰小时的道路交通流变化,通过变异系数法确定1-4交叉口的权重比为0.2、0.2、0.3、0.3。
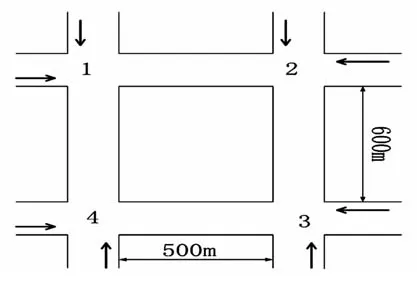
图1 实际路网简化示意图
图2 模拟路网
4.2 优化参数
利用synchro仿真软件对实际区域进行仿真,并根据实际道路参数和历史交通流量设置道路参数,选择区域平均延误最小和污染物排放最小的双目标模型,对区域各入口交通流量小、近饱和和饱和状态下的控制情况进行模拟,分别设置为800、1 000、1 200辆/h,获得不同交通流量的情况下,区域的平均延误和污染物排放总量。
为求得粒子群算法在不同交通状态下的微粒子,需要利用VisualC++对本文提出的粒子群算法编制程序,并根据以上仿真的基本数据用粒子群算法进行优化,3种不同流量下的最优粒子的输出对比synchro仿真得到如下表数据。
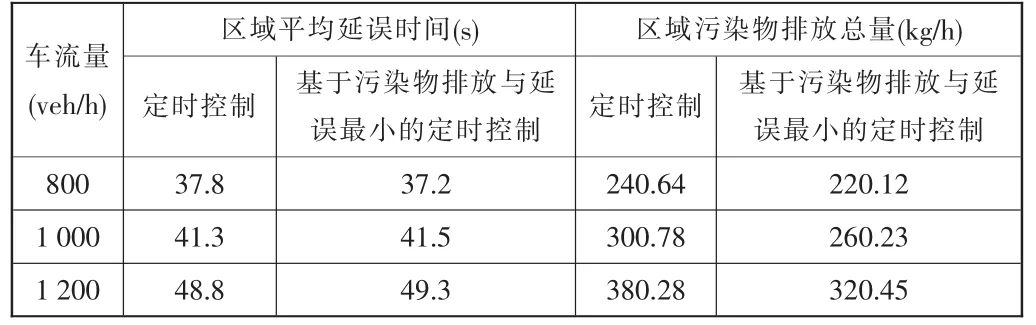
车流量(veh/h)区域平均延误时间(s)区域污染物排放总量(kg/h)定时控制基于污染物排放与延误最小的定时控制定时控制基于污染物排放与延误最小的定时控制80037.837.2240.64220.12 1 00041.341.5300.78260.23 1 20048.849.3380.28320.45
5 结束语
作者通过建立基于环境污染和延误最小的区域交通控制多目标信号控制模型,利用粒子群算法对该模型进行优化,该方法通过编程实现优化求解,并采用synchro仿真软件进行了仿真。结果表明,基于污染物排放和延误最小的信号控制可以有效减少污染物排放且对平均延误影响很小,该方法对于改善城市交通污染有十分重要的意义。
[1]王炜,项乔君,常玉林等.城市交通系统能源消耗与环境影响分析方法[M].北京:科学出版社,2002.
[2]唐殿奎.区域交通控制的分析与研究[D].济南:济南大学2010.
[3]于德新,高鹏,杨兆升.基于遗传神经网络的区域交通控制评价效果[J].北京工业大学学报,2010,36(4):490-494.
0141
A
1003-5168(2014)04-0154-02
詹娟(1989—),女,硕士研究生,研究方向:交通信号工程及控制。
猜你喜欢
铁道机车车辆(2022年1期)2022-03-24
消费导刊(2018年10期)2018-08-20
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17
工程建设与设计(2016年8期)2016-03-11
中国房地产业(2016年2期)2016-03-01
新民周刊(2015年19期)2015-09-10
浙江大学学报(工学版)(2015年1期)2015-03-01
系统工程学报(2015年3期)2015-02-28
城市轨道交通研究(2014年2期)2014-04-21
压缩机技术(2014年3期)2014-02-28