
基于多传感器融合的移动测绘系统应用评述
2014-07-01 23:29曲国庆
传感器与微系统 2014年8期
徐 工, 曲国庆, 卢 鑫
(1.山东理工大学 建筑工程学院,山东 淄博 255000;2.山东黄金矿业(玲珑)有限公司,山东 招远 265400)
综述与评论
基于多传感器融合的移动测绘系统应用评述
徐 工1, 曲国庆1, 卢 鑫2
(1.山东理工大学 建筑工程学院,山东 淄博 255000;2.山东黄金矿业(玲珑)有限公司,山东 招远 265400)
随着多传感器融合技术的发展,地面移动测绘系统(TMMS)作为一种多传感器集成的快速、高效的无地面控制测绘技术,近年来得到了飞速的发展和广泛的应用。针对该系统的工作原理、应用特点等具体研究了TMMS的实际应用优势,并通过实例从其数据采集的快速高效性、数据成果的丰富性及数据精度等方面,针对性地分析了TMMS在数字城市与三维建模中的应用。随着城市信息化的发展,地面移动测绘技术将在数字城市建设中发挥巨大的作用。
建模; 数字城市; 定位定姿系统; 多传感器融合技术; 可量测实景影像
0 引 言
地面移动测绘系统(terrestrial mobile mapping system,TMMS)是20世纪90年代兴起的一种快速、高效、无地面控制的测绘技术[1,2]。它是在机动车上集成了GNSS全球定位系统(GPS)、CCD相机、惯性导航系统(inertial navigation system,INS)、激光扫描(laser scanner,LS)系统等多种先进传感器[1~7],能进行高精度大场景三维数据信息采集。随着CCD,LS等数字传感器的快速发展,多传感器数据融合[8]已经成为移动测图系统设计、空间数据处理中最关键的一步,基于GPS/INS组合的直接地理定位、几何数据融合、时间和空间的配准都是移动测绘系统的基本问题。
目前,传统的数据采集仍采用RTK和全站仪等作业方式[4],随着数字城市[3]、数字地球的发展,对地理空间数据的获取与更新速度提出更高的要求,而传统数据采集手段安全隐患多、作业效率低,已不能满足人们对空间信息快速获取与更新的需要[3,9]。TMMS的产生,很好地解决了这个问题,它作为高精度、高效率的海量三维数据采集手段,己在我国100多个数字城市信息化项目中得到成功应用[3,9]。
随着数字城市的发展,街景的三维可视化已成为数字城市发展中的一项重要工作,利用TMMS获取建筑物立面影像数据和高密度点云数据,进行三维重建以实现城市模型的可视化已成为研究的热点。
1 TMMS的应用优势
TMMS的迅速发展,与高效、实时地获取和更新地理空间数据的需求密切相关,与传统数据获取手段相比[9],具有较大优势,表1是TMMS与传统测图方式的比较情况。

表1 TMMS与传统方式的比较Tab 1 Comparison between TMMS and traditional method
2 TMMS系统应用分析
2.1 TMMS系统在数字城市与三维建模中的应用
随着TMMS的发展,其应用范围越来越广泛,包括公安部门的交通事故勘察与流动违章处理,高速公路修测、监控及管理,城市规划图的数据采集与更新、城市部件检查等[3]。其中典型的应用有:
1)高速公路测量:TMMS在高速公路测量中能够进行道路地形图的测量,可获取道路周围地物属性信息、点位信息及可量测影像,测量操作简单,降低了作业成本,提高了工作效率。
2)数字地形图的快速采集与更新:TMMS可用于电子地图的制作、道路状况、道路设施等的实时监控等方面,能够迅速地发现变化,实现对原图的及时修测[10]。
3)建筑物三维建模:TMMS能够根据实际应用需求,分别通过影像数据或点云数据进行城市建(构)筑物三维重建。
2.2 移动测量精度应用分析
TMMS野外采集信息丰富,既有点云数据,也有影像数据,成果包括数字线划图(digital line graphic,DLG)、三维模型、街景漫游、可量测实景影像[3,11,12]等,必会在道路、交通、公安,数字城市各领域得到较好的应用。
结合某移动测绘系统所做的实验数据,得到一组车速与点云线间距之间的关系,如表2所示。
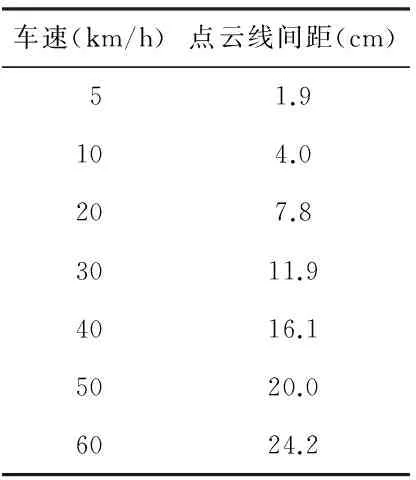
表2 车速与点云线间距之间的关系Tab 2 Relation between vehicle speed and point cloud line space
由表2可以看出:当车速小于20 km/h时,移动扫描点云线间距在10 cm以内,可以满足高速公路1︰1 000比例尺地形图测绘的精度需求,但此时车速较慢,效率较低;当车速在30~50 km/h之间时,移动扫描间距在20 cm之内,可以满足高速公路1︰2 000比例尺数字地形图测绘的精度要求。
3 实例分析
3.1 数据采集
实验段公路长约4 km,为了保证测量效率,移动测量车行驶速度均匀(约30 km/h)。实地踏勘后,设计行车路线,由2名工作人员半天内即完成了外业数据采集,内业数据预处理、DLG和重要建筑物的三维建模共用时约2天;而采用传统测量方式,则需要3个人花费6天左右时间。
3.2 数据处理
3.2.1 移动测量精度检核
对移动测量精度评定,采用GPS RTK结果与移动扫描点云精度进行比较,检核结果如表3所示。
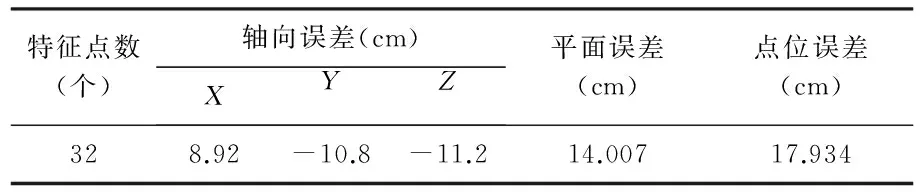
表3 特征点精度检核Tab 3 Precision test of feature point
3.2.2 数据成果
项目可以输出的数字成果丰富,实现了数字地形图的快速更新,同时可建立目标物的三维实体模型,实现实景影像的量测等。
1)图1为利用点云数据生成的DLG,可满足1︰2 000甚至更小比例尺带状地形图的绘制;
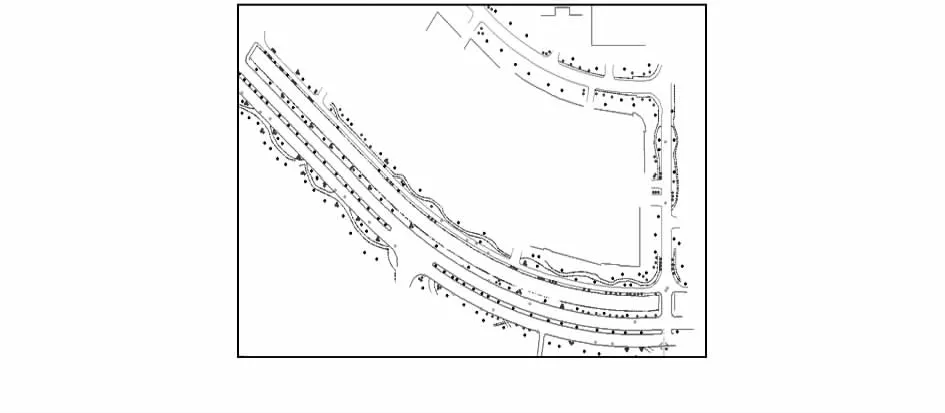
图1 DLGFig 1 DLG
2)图2为通过获取的目标点云数据快速完成的三维实体模型,能够更直观地进行成果管理;
3)图3为在GIS平台上实现实景影像的量测,可在影像上直接量取地物信息,如长度、面积、点位信息等,实现二、三维的联动,提高了数据采集和更新的效率,使城市管理更加便捷和真实。

图2 建筑物三维实体模型Fig 2 Building 3D solid model

图3 可量测实景影像Fig 3 Measurable scenery image
3.3 建模效果比较
下面是对某建筑物的三维实体重建,扫描时车速约15 km/h,扫描距离在15~25 m之间。图4是大楼的原始点云数据,图5是由车载点云数据建立的大楼三维模型效果。

图4 原始点云Fig 4 Original point cloud

图5 建筑物三维模型Fig 5 Building 3D model
表4是对模型的几何体特征与全站仪测量结果进行的精度比较,取全站仪测量数据作为“真值”,通过对窗户、墙面、装饰物等对象的长度、面积的比较,对移动扫描点云数据所建模型精度进行评价。

表4 模型几何体特征比较Tab 4 Comparison of model geometry feature
从表4的结果中可以看出:TMMS模型与全站仪测量所得距离偏差为10~20 cm左右,个别误差稍小;面积偏差随着测量对象面积的增大而增加。TMMS建模误差来源除测量误差外,点位偏移、点云拟合等都会带来一定影响,通过进一步优化,利用TMMS进行数字城市三维建模工作是可行的。
4 结束语
利用TMMS快速采集外业数据,一方面,能极大地缩短工期,降低作业成本,提高数据采集和更新的效率,实现外业采集的一体化;另一方面,将获取的各传感器数据进行联合解算,得到点云和影像数据,利用点云数据制作线划图和三维模型,利用全景影像提取纹理,同时能实现可量测实景影像,极大地降低了三维建模和纹理提取的工作量,使成果管理更加丰富直观,具有多样性。
目前,TMMS已经从实验室走向市场,在测绘、勘探、交通、公安等领域已经得到了广泛的应用,取得了良好的收益,具有广阔的应用前景。
[1] 陈 芳.移动测量系统在城镇大比例尺地图快速测量和更新中的应用[D].焦作:河南理工大学,2011.
[2] 丁安民,陈 芳,张合兵,等.车载移动测量系统在大比例尺测图中的应用[J].河南理工大学学报:自然科学版,2011,30(2):161-163.
[3] 李德仁,郭 晟,胡庆武.基于3S集成技术的LD2000系列移动道路测量系统及其应用[J].测绘学报,2008,37(3):272-276.
[4] 麦照秋,陈 雨,郑 祎.IP-S2移动测量系统在高速公路测量中的应用[J].测绘通报,2010(12):23-26.
[5] Wang Jian,Jin Fengxiang.Precision estimation of mobile laser scanning system[J].Survey Review,2010,42:270-278.
[6] 张 伟.基于移动道路测量系统的数字道路采集外业生产研究[J].测绘与空间地理信息,2009,32(4):172-173.
[7] Li Rongxing.Mobile mapping—An emerging technology for spatial data acquisition[J].Photogrammetric Engineering and Remote Sensing,1997,63(9):1165-1169.
[8] Anttoni Jaakkola,Juha Hyyppä,Antero Kukko,et al.A low-cost multi-sensorial mobile mapping system and its feasibility for tree measurements[J].Journal of Photogrammetry and Remote Sen-sing,2010,65:514-522.
[9] 李德仁,郭 晟.移动测量与导航数据采集与更新[J].ITS通讯,2005(1):25-28.
[10] 易延光,黄洪彬.车载移动测量系统的构成与应用[J].黑龙江水利科技,2011,39(3):284-285.
[11] 张晓东,杨元喜,崔先强.可量测影像序列的组合定位算法及其在1:50000地图测绘中的应用[J].测绘学报,2010,39(3):231-236.
[12] 李德仁,胡庆武.基于可量测实景影像的空间信息服务[J].武汉大学学报:信息科学版,2007,32(5):377-380.
Review of application of mobile mapping system based on multi-sensor fusion
XU Gong1, QU Guo-qing1, LU Xin2
(1.College of Civil Engineering and Architecture, Shandong University of Technology,Zibo 255000,China;2.Shandong Gold Mining (Linglong)Co Ltd,Zhaoyuan 265400,China)
With the development of multi-sensor fusion technology,terrestrial mobile mapping system(TMMS),as a multi-sensor integration,fast,high efficient non-ground-control surveying technology has recently gained its rapid development and extensive application.Aiming at operation principle and application characteristic,the actual application advantages of TMMS are specifically studied,and the specific application of TMMS in the area of digital city and 3D modeling is also analyzed in detail by example from the aspect of high efficiency of data collection,richness of data results and data precision.With development of city informatization,TMMS technology will play a great role in digital city construction.
modeling; digital city; position orientation system; multi-sensor fusion technology; measurable image
10.13873/J.1000—9787(2014)08—0001—03
2014—01—20
P 234.4
A
1000—9787(2014)08—0001—03
徐 工(1983-),男,山东莱芜人,博士,讲师,研究方向为数字城市与三维建模。
猜你喜欢
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
浙江国土资源(2019年10期)2019-10-31
建材发展导向(2019年10期)2019-08-24
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
电子制作(2018年11期)2018-08-04
中国公共安全(2017年7期)2017-10-13
电子制作(2017年9期)2017-04-17
测绘科学与工程(2016年5期)2016-04-17
