
车牌识别与检测
2014-06-30 08:41:38赵夏君
湖南交通科技 2014年1期
赵夏君
(武汉大学遥感信息工程学院,湖北武汉 430000)
0 引言
汽车牌照识别技术是计算机视觉和模式识别技术在现代智能交通系统中的一项重要的研究课题,是实现交通管理智能化的重要环节。在不影响汽车运行状态的情况下,计算机自动完成车牌的识别,可降低交通管理工作的复杂度。车牌自动识别技术在车辆过路、过桥全自动不停车收费,交通流量控制指标的测量,车辆自动识别,高速公路上的事故自动测报,不停车检查,车辆定位,汽车防盗,稽查和追踪车辆违规、违法行为,维护交通安全和城市治安,防止交通堵塞,提高收费路桥的服务速度,缓解交通紧张状况等方面有重要作用,因此对汽车牌照识别技术的研究有重要的现实应用意义。
1 问题的提出
车牌识别在交通监视,车辆牌监控与管理方面有着广泛的应用。目前的车牌识别方法主要是针对车辆自动注册和收费,停车场管理等场合,所监视的区域一般只有单一车辆,背景比较简单。在我国的许多运用场合监视区域比较复杂,现有的方法无法直接运用,比如,高速公路的监视与监控,城市要道的监视与监控,所监控的区域一般同时会出现多辆汽车,背景也比较复杂。另外,车辆牌照识别系统是全天候的,若没有理想的补充光照明,自然光照度的昼夜变化会引起牌照图像的对比度严重不足,使图像中牌照字符分辨不清,甚至根本无法定位和分割,更无法识别。针对这些,该技术在我国现状下还有着很大的发展空间。
2 研究的意义
我国从70年代开始在传统的交通运输和管理中应用了电子信息技术,随着社会的发展与进步,我国道路在未来20a内仍然处于建设状态,这期间正是智能交通系统在全世界进入全面设施阶段,因此我国需要根据公路交通的实际需要探讨在我国公路网中应用智能交通系统来提高交通效率,保障安全和保护环境。
3 研究的结构安排
整个识别系统中要用到的硬件主要有摄像头、感应器和计算机。车牌识别系统的软件部分主要分为四大块,即预处理、车牌定位、车牌字符的分割和字符识别。本篇报告按照如上顺序完成。
原始图像:由停车场固定彩色摄像机、数码相机或其它扫描装置拍摄到的图像。
图像预处理:对动态采集到的图像进行滤波,边界增强等处理以克服图像干扰。
边缘提取:通过微分运算,二值化处理,得到图像的边缘。
车牌定位:计算边缘图像的投影面积,寻找峰谷点,大致确定车牌位置,再计算此连通域内的宽高比,剔除不在域值范围内的连通域。最后得到的便为车牌区域。
字符分割:利用投影检测的字符定位分割方法得到单个的字符。
字符识别:利用模板匹配的方法与数据库中的字符进行匹配从而确认出字符,得到最后的汽车牌照,包括英文字母和数字。
4 算法描述
4.1 算法1二值化
二值图像是指整幅图像画面内仅黑、白二值的图像。在数字图像处理中,二值图像占有非常重要的地位。在实际的车牌处理系统中,进行图像二值变换的关键是要使得字符与背景能够分割开来,二值变换的结果图像必须要具备良好的保形性,不丢掉有用的形状信息,不会产生额外的空缺等等。车牌识别系统要求处理的速度高、成本低、信息量大,采用二值图像进行处理,能大大地提高处理效率。
1)添加二值化的菜单;
2)添加菜单的消息响应函数;
3)函数体的开头部分,获取图像信息;
4)计算阈值。
状态法:
①定义阈值;
②定义并初值化灰度统计数组hist[256];
③定义类1质量矩和类2质量矩、类1灰度均值和类2灰度均值、迭代次数等;
④计算阈值(关键代码)。
4.2 算法2灰度拉伸
图像识别是图像处理的重要方法,图像边缘检测若有一幅图,由于拍摄光照不足,使得整幅图偏暗(例如,灰度范围从0~55),或者拍摄时光照过强,使得整幅图偏亮(灰度范围从200~255)这些情况都是属于低对比度,即灰度都挤在一起,没有拉开。灰度拉伸的意思就是把感兴趣的灰度范围拉开,使得该范围内的像素,亮的更亮,暗的更暗,从而达到了增强对比度的目的。
4.3 算法3边缘检测
图像识别是图像处理的重要方法,图像边缘检测是图像识别技术的重要环节,一般是通过提取景物边缘而获得边界。图像的边缘对人的视觉有重要意义,数字图像的边缘检测技术是下一步图像分割、提取,乃至识别的基础,但是边缘与物体间的边界也不完全一致,有时,有边缘的地方并不一定就是边界,反之亦然,所以一定程度上会加大图像边缘检测的难度。边缘通常指的是图像局部强度变化最显著的部分。前景目标与前景目标之间、前景目标与背景之间、不同区域之间。下面是常见的一阶边缘检测算子。
4.3.1 Robert算子
Robert算子是一种简单的算子,它的计算梯度幅度值的公式为:

在上式图中某点(x,y)的像素值为 f(x,y)。Robert算子是基于2×2的梯度算子,该算子边缘定位准确,但对噪声较敏感,主要用于噪声少的图像,其算子模板为:

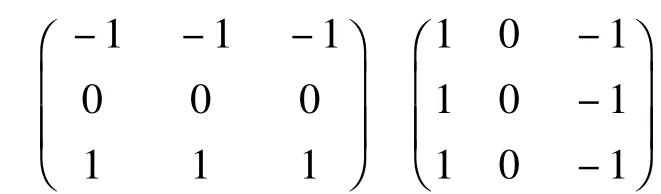
4.3.2 Prewitt算子
Prewitt边缘算子是由下面的两个卷积核形成。图像中的每个点都用这两个核进行卷积,取最大值作为输出。该算子的的特点是先对像素进行平均,再微分,这样做的好处是,对噪声有抑制作用但同时在边缘的定位方面就不如Robert算子准确。Prewitt算子表达式为:
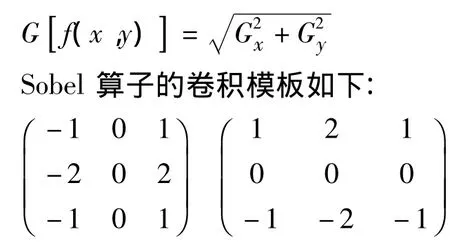
4.3.3 Sobel算子
Sobel边缘算子是基于3×3的梯度算子,先加权平均,再微分。Sobel算子的卷积模板由两个卷积核定义,分别为水平方向和垂直方向。表达式如下:

梯度幅度值通常按照下式计算:
因为3种方式方法类似,下面以Robert算子为例:
1)在“图像分割”——“边缘检测”中添加菜单项:“Roberts算子、Prewitt算子、Sobel算子、自定义算子”;
2)为各个菜单添加响应函数;
3)设计对话框;
4)函数体中的开头部分,为相同的代码(得到图像的长和宽,开辟新的内存空间等):
5)函数循环部分:根据不同的模板来进行不同的卷积运算。
5 实验结果及分析
原图如图1。
灰度拉伸之后图像如图2。

图2 灰度拉伸之后图像
二值化后图像如图3。

图3 二值化后图像
边缘检测后处理结果对比如图4。
由以上对比可见,Robert算子是一种不错的检测方式;而且Robert算子边缘检测算法简单有效。

图4 边缘检测后处理结果对比图
6 总结与展望
本文对车牌识别系统的软件部分进行了研究,分别从图像预处理、边缘检测、车牌定位等方面进行了系统的分析。在不远的未来,车牌识别系统将会有更大的发展。
[1]叶晨洲,等.车辆牌照字符识别[J].上海交通大学学报,2000(5):4~6.
[2]刘智勇,刘迎建.车牌识别(LPR)中的图像提取及分割[J].中文信息学报,2000,14(4):29 ~36.
[3]张 禹,马驷良,韩 笑,等.车牌识别中的图像提取及分割算法[J].吉林大学学报,2006,44(3):407 ~410.
[4]刘佐濂,邓荣标,孔嘉圆.一种车牌识别算法的实现[J].中国科技信息,2005(23):9~12.
[5]宋建才.汽车牌照识别技术研究[J].工业控制计算机,2004:44~45.
猜你喜欢
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:10
高技术通讯(2021年2期)2021-04-13 01:09:46
电子制作(2019年12期)2019-07-16 08:45:16
测控技术(2018年10期)2018-11-25 09:35:28
知识经济·中国直销(2017年12期)2018-01-03 08:21:20
知识经济·中国直销(2017年8期)2017-09-05 09:53:04
小猕猴智力画刊(2017年5期)2017-05-25 21:44:09
计算机应用(2016年10期)2017-05-12 15:22:34
电子制作(2017年22期)2017-02-02 07:10:11
知识经济·中国直销(2016年1期)2016-08-24 07:20:54
