
Trimble UX-5航空影像系统用于1∶1000地形图的探讨
2014-06-27 05:47胡茂林唐相川
测绘通报 2014年7期
胡茂林,唐相川
(中国电力工程顾问集团西南电力设计院,四川成都 610021)
Trimble UX-5航空影像系统用于1∶1000地形图的探讨
胡茂林,唐相川
(中国电力工程顾问集团西南电力设计院,四川成都 610021)
一、引 言
无人机航摄已经大量应用于电力勘测设计中,在小面积地形图测绘、应急工程项目、短距离送电线路项目中,是对传统航拍的有效补充。实践证明传统汽油动力无人机航摄系统具有运输不便、易于损坏、起降场地要求较高、飞行存在安全隐患等缺点。Trimble UX-5系统能有效地解决上述问题,为快速获取小区域的地形测绘资料提供了新的手段,有利于适应目前业主要求方案多、时间紧的情况。本文结合安徽涡北电厂项目的实际生产,对UX-5系统进行了1∶1000地形图成图的测试。
二、Trimble UX-5航空影像系统组成
Trimble UX-5航空影像系统由3部分组成:①任务计划和飞行控制系统(软件):Trimble Access航空摄影应用软件方便进行飞行任务设计、飞行计划、飞行操控和飞行成果分析;②图像获取系统(硬件):Trimble UX-5无人机采用电池驱动,搭载SONY NEX5R相机,全自动起降,地面采样间隔达到2.4 cm,飞行安全无污染;③成果处理系统(软件):TBC(Trimble Business Center)摄影测量模块可全自动处理 UX-5的数据,快速生成数字正射影像(DOM)、数字地面模型(DSM)、点云(point cloud)等成果。该系统具有操作简单、数据处理方便、飞机易于携带、起降场地要求低、飞行无污染、安全、获取成果速度快等优点,技术流程如图1所示。
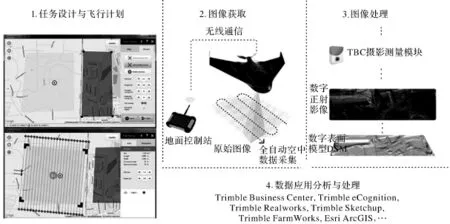
图1 UX-5快速地形图获取的技术流程
三、UX-5航空影像系统1∶1000成图试验
1.航摄概况
刘店矿北厂址位于安徽省西北部涡阳县,是典型的平原地形。测区内多为麦地,北面有村庄,西南面为刘店矿区。测区分布有铁路、公路、电力线、沟渠等地物,高程约30 m,面积约2 km2。本次航摄选择航高200 m,地面分辨率6.4 cm,航摄时为东风,航线按照南北向设计,旁向和航向重叠度选取推荐的80%,单航线39张照片,18条航线,共获得相片701张,耗时38 min。照片分辨率为4912像素×3264像素,像元大小4.8 μm。曝光时间为1/2000 s,感光度ISO500,成像清晰。飞机在麦地中弹射起飞,自动飞到设计航高和路线起点;飞完设定的区域后,自动盘旋下降,并按照设定的位置采用机腹着陆方式着陆。无人机航飞时长30 min,飞机轨迹如图2所示。

图2 飞行轨迹图
2.航测外业
1)外控点布设:航摄前在测区的四角和中心布设了标靶,在航飞的同时使用GPS RTK测量了标靶的坐标作为像控点。为对成品的精度进行评定,使用GPS RTK测量了60个平面检查点,204个高程检查点。检查点在测区内均匀分布。
2)现场调绘:使用拼接好的数字正射影像调绘电力线走向、房屋属性等。
3.TBC处理
使用TBC 3.10摄影测量模块对航摄数据进行处理,导入原始像片和飞行轨迹文件后,即可进行连接点平差;导入像控点数据后,即可进行像控点刺点(非立体量测)和控制点平差,平差完成后形成平差报告;最后一键生成数字正射影像、点云和数字表面模型。
4.数字化DLG
利用TBC生成的数字正射影像,调入CASS成图软件,使用数化功能配合调绘片绘制平面图。
5.提取高程数据
使用软件,调入TBC生成的数字表面模型和Global Mapper数字正射影像,设定采样间隔,自动提取高程点,再输入CASS形成地形点数据,生成等高线。关键的地形点采用手工提取。
6.图面整饰
在CASS中修正不正确的高程点和等高线,添加文字注记,形成成品地形图。
四、精度统计
按照平面检查点的点位说明从数字正射影像上提取点位坐标,输入到电子表格中进行平面坐标比较。有效检查点共57个,最大点位误差0.637 m,最小点位误差 0.003 m,点位中误差 0.23 m,满足1∶1000地形图平面精度要求。误差统计如图3所示。
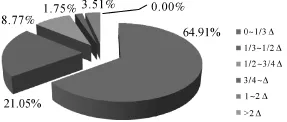
图3 平面检查点误差统计图(Δ=0.6 m)
按照高程检查点的坐标从数字表面模型上提取高程数据,输入到电子表格进行高程比较。有效检查点共203个,最大高程差0.72 m,最小高程差0 m,高程中误差0.22 m,且高程差符合标准正态分布,如图4、图5所示。

图4 高程误差分布曲线

图5 高程检查点误差统计图(Δ=0.25 m)
五、结束语
利用Trimble UX-5系统可以方便地对测区进行航摄,快速完成数据处理,生成数字正射影像、点云和数字地面模型;使用矢量化软件和DEM分析软件,可以快速得到满足精度要求的1∶1000地形图。
(本专栏由天宝测量部和本刊编辑部共同主办)
猜你喜欢
计算机系统应用(2022年4期)2022-05-10
天津医科大学学报(2021年4期)2021-08-21
航天制造技术(2020年4期)2020-09-11
国际呼吸杂志(2019年4期)2019-03-12
制造技术与机床(2018年12期)2018-12-23
证券市场红周刊(2018年37期)2018-05-14
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
纯粹数学与应用数学(2017年5期)2017-11-01
测绘科学与工程(2016年4期)2016-04-17
遥感信息(2015年3期)2015-12-13
