自动整平基座在地下工程测量中的应用*
2014-06-21 10:49刘绍堂潘洁晨
城市轨道交通研究 2014年3期
刘绍堂 潘洁晨
(1.河南工程学院,451191,郑州;2.同济大学测量与国土信息工程系,200092,上海∥第一作者,教授)
现代工程施工正在向自动化方向发展。施工自动化常常需要自动化的工程测量和自动化的施工导航系统作保障。自动化工程导航需要仪器的自动整平。现有的自动整平机构,根据其用途,一类是用于大型设备的自动整平,一类是用于动态载体的整平和调平。常见的测量和施工导航仪器的整平机构则是小倾斜范围环境下的自动安平装置和电子补偿装置。
文献[1]针对测量用的三角架占用面积大,对中整平慢的缺点,根据液体表面水平原理,采用传感器侦测支架水平方向的倾斜、机电一体化自动调平的方法设计了一种自动安平仪器支架。文献[2]实现了自动调平,但仅适用于大吨位车载光学仪器代替原来的人工调平。文献[3]以德国西门子公司生产的SIMATIC S7-300可编程逻辑控制器为主控器件,设计了一种自动调平系统,经试验验证可应用于各种大型车辆的调平。文献[4]及文献[5]介绍了几个自动整平机构,但对测量仪器很难适用。综上所述,虽然已经存在多种自动整(调)平系统,但关于针对测量仪器实现大倾斜环境下自动整平方面的文献少有报道。本文在介绍现有全站仪自动补偿功能的基础上,讨论自动整平基座在地下工程测量中的应用。
1 全站仪的自动补偿功能
现有的具有自动目标识别与照准功能的全站仪,有的具有双轴自动补偿功能,也有的具有三轴自动补偿功能。
所谓的单轴补偿是指补偿前后方向的误差;双轴补偿是指补偿前后方向及左右方向的误差;三轴补偿是指除补偿以上两种误差外,自动补偿水平轴与视准轴的误差。使用三轴补偿可以补偿由于仪器竖轴前后方向的倾斜及左右方向倾斜所引起的误差,同时也可补偿视准轴倾斜所引起的误差。自动补偿的实质是对竖角和水平角读数的补偿和修正。
以徕卡系列全站仪为例,其补偿器的补偿精度和设置精度如表1所示。
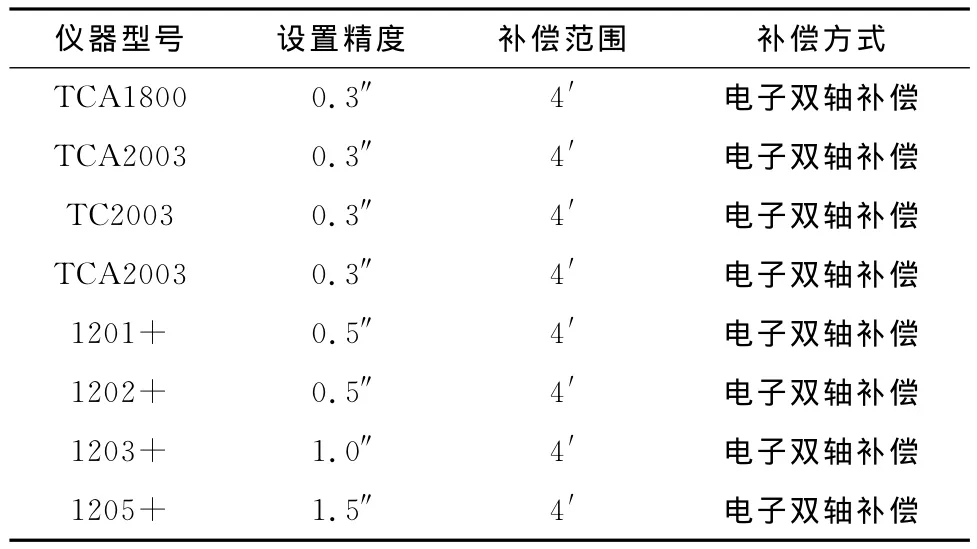
表1 徕卡系列全站仪补偿器的补偿范围和设置精度
我国GGJ 100—94国家计量检定规程对电子经纬仪检定中要求:Ⅰ、Ⅱ、Ⅲ、Ⅳ级全站仪及电子经纬仪,倾斜补偿器的补偿范围为3′,补偿准确度≤3″。由表1可知,徕卡双轴补偿是在保证仪器水平误差在±4′之内的补偿,所以在使用双轴或三轴补偿之前,一定要先将仪器管水准气泡调在中间,在倾斜没有超出±4′范围内,补偿才有效。也就是说,即使采用徕卡仪器,单靠仪器本身自动补偿的范围是十分有限的(4′)。因此,要真正实现动态测量下更大倾斜范围内的自动整平则必须引入专用自动整平设备。
2 自动整平基座整平原理及其与测量仪器的协同工作
2.1 自动整平基座整平原理
电子自动整平基座一般由传感器、电子线路和执行机构等组成。它采用倾斜传感器,测量仪器基座的倾斜大小和倾斜方向,利用伺服电机对激光器准直系统的输出方向进行实时修正。电子自动安平的安平范围可大至10.8°~16.2°,并且具有较高的稳定性和补偿精度。
电子自动整平的全部功能由单片机控制实现。其外部设备有:键盘(包括开关按键和指示灯),2个倾角传感器,2个步进电机。倾角传感器和步进电机协同实现仪器的自动整平。当开关命令输入单片机,单片机则根据输入的命令,开始执行相应的工作,并点亮相应的指示灯。电子自动整平的整平过程是:倾角传感器测量某轴线方向的倾角并发出倾角信号给单片机,单片机接到倾角信号后判断仪器是否水平,若计算出仪器未整平时,则驱动2个步进电机根据信号从x、y两个方向对基座进行调整;这个过程反复进行,直到单片机通过采集的信号判断仪器已经调平为止。图1为AD-12自动整平基座的外观和尺寸。

图1 自动整平基座的外观和尺寸
2.2 参数设置与精度控制
设步进电机传动比为n,力臂为L(mm);传动杆的螺距为d(mm);步进电机步距角为δ(°),最小步进量为ΔL(mm);整平基座的整平精度为σ(°)。由于σ特别小,可以建立等式:

根据式(1)可以任意配置参数,在整平精度和其余参数之间任意设置参数组合。
例如:设n=20,L=100mm,d=0.5mm,δ=3°,由式(1)可得
σ=tan-1{[(d/(360n/δ)]/L}=0.43″
即实现σ=0.43″的整平精度。
在式(1)中,设σ=32.4″,选用n=22、d=0.5 mm、δ=3°,则可以求出L的合理值为64.84mm。
同理,也可以根据工作和生产需要,结合制造工艺通过改变其他参数设置,找到自动安平基座的精度和尺寸及其余参数的匹配。
2.3 自动整平基座与测量仪器的协同工作
由于电子自动整平基座的整平范围较大,但精度有限,而测量仪器本身的电子补偿精度很高,范围有限,所以,在动态实时监测或者在仪器受环境影响较大的环境中仪器还需要借助自动整平基座协同完成精密整平工作。自动整平基座与测量仪器的配合与协同工作如图2所示,从设计角度[6]应该考虑以下几个重要因素:
1)自动整平基座能够承载大多数的测量仪器;一般测量仪器质量都在几kg到10kg内,因此,自动整平基座最大的承载能力要达到10kg。
2)由于自动全站仪的自动补偿范围有限,过大的倾斜不能稳定输出合格成果,要求自动整平基座的整平的范围要足够大。自动整平基座整平范围达到10.8°~16.2°,即可满足大范围自动整平的需要。
3)由于自动全站仪的补偿精度很高,自动整平基座精度则没有必要很高。由表1可知,自动全站仪的电子倾斜补偿器的补偿范围为3′~4′,在这个范围内可以达到0.3″~1.5″的补偿精度。因此,自动整平基座的整平精度控制在自动全站仪的补偿范围内,两者协同工作即可达到0.3″~1.5″的补偿精度。也就是说,自动全站仪完全可以对自动安平基座整平精度的不足进行补偿,自动全站仪与安平基座协同工作满足了高精度自动整平的需要,故自动安平基座只需要±0.5′或者更低的精度,这为制造带来了方便。
4)为满足在尘土、震动、潮湿、电磁场等现场作业环境条件下长时间不间断地连续工作的需要,自动整平基座的主要构件要求被封装密闭,具备良好的防水、防尘与稳定性。
5)根据自动整平基座整平范围大的特点,在安置仪器时无需进行严格的调整。当基座或初始未置平或受外界扰动的影响或经过缓慢的移动之后,均能按照其自身精度快速实现自动整平,大大简化了操作,提高了效率;配合全站仪补偿器的精密补偿,能达到良好的整平效果,特别适用于需要动态自动测量的场合。
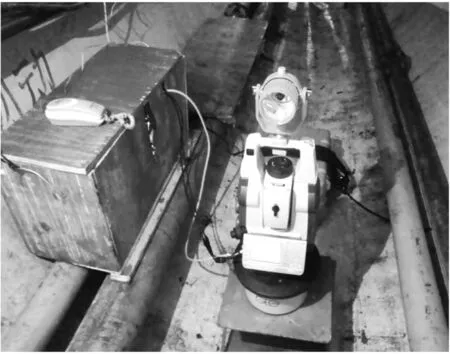
图2 自动整平基座的应用实景图
3 应用实例
某引水隧道直径为3 800mm,长1 700m,线路为连续变坡,东线坡度从-16‰每隔35m增加1‰,直到坡度为-1‰,首尾高差为19.70m;西线坡度从-13‰每隔20m增加1‰,到直接入水平段,首尾高差为15.30m。
由于是曲线隧道,而且要铺设无缝管线,技术要求比较高。与以往普通线路相比,在施工工艺、方法和质量控制等方面有较大的不同[7]。综合考虑环境的影响,依靠传统技术采用导线法完成隧道测量的工作量大、效率低下,为保证工程施工质量和工程的顺利贯通,必须采用自动导向的技术来进行曲线隧道施工的定向和导航,采用了隧道自动导向测量方法来指导施工。鉴于本隧道采用顶管法施工,每次测量前管道都处于移动状态,要进行自动导向测量则需要各站点仪器能自动整平而不受施工管道移动的影响。
隧道自动导向测量方法[8-9]如图3所示,其中T1、PL、PR为已知点,T2、T3为过渡的导线点,P1、P2为导线支点,P0为顶管机的机头中心位置。

图3 隧道施工自动测量方法
1)采用自动导向测量方法时在T1、T2、T3各点架设马达驱动型全站仪和棱镜,每台全站仪都通过电缆连接计算机。
2)各站点上的全站仪在计算机的指挥下相互配合,按预先设置的导线测量程序,自动有序地测量导线各点处的水平角、垂直角及导线各边的边长,并及时把角度和边长等实测数据自动传送给计算机。计算机负责数据处理。在特殊场合下在顶管机的机头中心位置P0无法安置全站仪反射棱镜,P0坐标则由P1、P2点归算而得出。
3)计算机的计算结果会自动与设计轴线对比,并实时在计算机屏幕上显示机头中心P0相对于设计轴线上的上下偏差、左右偏差的轨迹图形和具体数值,同时还显示出测量瞬间的里程和时间。该系统只需人工操作全站仪进行测量学习一次,剩余测量过程均在计算机CPU的控制下自动运行,全程不需人工干预,单次测量不超过5min的时间。
根据以上测量方法可以得出,按照3站导线测量的方式构成的自动导向测量系统的标准配置:首先需要配置1台计算机,计算机是系统的控制中心,它控制全站仪的测量过程并进行数据的收集和处理;每1个导线点上需安置1台电机驱动型自动全站仪,共需要配置3台电机驱动型全站仪;全站仪要实现自动整平,所以还至少需要2台自动整平基座;还需要在后视点、机头点及各导线点上的安置棱镜,导线点上棱镜必须固定于全站仪的手柄上;为保持使棱镜中心和全站仪的旋转中心位于同一垂线上,还需要棱镜接合器3套;为了实现系统通信,计算机及全站仪可以通过屏蔽线有线方式或者无线方式实现指令及数据传输;而自动隧道系统的软件则利用全站仪的坐标测量功能实时测定和控制隧道方向,利用全站仪三角高程测量功能实时测定和控制管道标高,配合系统硬件获取实时测量数据,绘制机头偏差轨迹,实时在显示屏上显示当前里程与机头中心位置。其中,自动整平基座安置如图2所示。
4 结语
实际应用表明,隧道测量自动导向系统以自动整平基座为基础,以智能全站仪为平台,配合自动测量与导向软件,在计算机控制下解决了超长曲线隧道的自动测量问题;自动整平基座的使用保障了全站仪能在动态测量可能出现大倾斜环境下的自动整平,提高了整个系统的动态可靠性和稳定性,为隧道工程顺利顶进和贯通提供了令人满意的结果。随着施工自动化和信息化技术的发展,其在工程自动测量和动态监测领域的应用有望日益广泛。
[1]张文胜,吴立新.自动安平仪器支架的设计与实现[J].测绘通报,2005(3):59.
[2]姜伟伟,高云国,冯栋彦,等.大型光电设备基准平面自动调平系统[J].光学精密工程,2009(5):1039.
[3]姚舜才,张艳兵.基于PLC的自动调平系统[J].华北工学院学报,2003(1):404.
[4]欧同庚,王琪,傅辉清,等.水平面基准系统的自动调平方法研究[J].大地测量与地球动力学,2008(5):129.
[5]张艳兵.PLC控制的4点调平系统[J].华北工学院学报,2004(3):198.
[6]吕绍裘.徕卡TCA自动全站仪配自动安平基座AD-12是隧道掘进的最佳测量设备之一[C]∥中国测绘学会.2002年全国测绘仪器综合学术年会论文集.北京:中国测绘出版社,2002:1.
[7]胡为珍.铁道无缝线路改造施工技术要点和质量控制标准[J].吉首大学学报:自然科学版,2011,32(4):79.
[8]潘国荣,刘毛毛,赵鹏飞,等.超长顶管智能引导测量系统研究[J].工程勘察,2010(1):66.
[9]潘国荣,陈晓龙,丁东强.汕头市过海顶管自动测量系统的研究与实现[J].武汉大学学报:信息科学版,2010(3):299.
猜你喜欢
中国港湾建设(2022年12期)2022-12-28
中国港湾建设(2022年12期)2022-12-28
防爆电机(2021年2期)2021-06-09
机械工程与自动化(2020年4期)2020-08-25
模具制造(2019年7期)2019-09-25
船舶标准化工程师(2019年4期)2019-07-24
森林工程(2018年4期)2018-08-04
中国港湾建设(2017年11期)2017-12-19
航天工业管理(2017年4期)2017-05-12
光学精密工程(2016年4期)2016-11-07