一种多径条件下的捕获算法
2014-06-13 11:59:26梁保卫刘志轩
无线电工程 2014年6期
梁保卫,吴 丹,刘志轩
(1.中国电子科技集团公司第五十四研究所,河北石家庄050081;2.北京航天长征飞行器研究所,北京 100076)
0 引言
无人机上行数据链在解扩中通常采用滑动相关法,它是串行捕获算法;位同步环路常采用延迟锁定环。串行捕获算法节省资源,延迟锁定环工作稳定且跟踪精度高;但是在实际飞行中,常会遇到无人机飞到某一区域后,出现数据链路误码率增大甚至失锁的现象,这种现象严重影响了无人机数据链的通信可靠度[1,2]。文献[1]认为造成这种现象的原因是多径衰落,由于无人机是在通视条件下且低仰角飞行,直射径和反射径叠加造成信号的2径衰落,且深衰落强度与飞机的飞行高度和距离及工作频率有关。在多径环境下延迟锁定环的鉴相曲线会严重畸变,造成环路失锁,且串行捕获算法重新捕获时间长;而基于数字匹配滤波器(DMF)结构的时间窗捕获算法是并行捕获算法,捕获时间快;同时开环结构的时间窗定时同步能够适应信号的快衰落,对多径有一定的抵抗作用。
1 DMF结构的捕获算法
1.1 DMF的结构
在无人机和航天测控系统中,由于扩频增益较高,因此利用DMF[3-6]实现长码的快捕受到了硬件条件的限制,难以达到要求。近几年随着大规模集成芯片的诞生,为利用DMF实现长码的快捕提供了硬件支持,DMF具有FIR滤波器结构,I、Q两路数据通过DMF结构滤波器的输出如式(1)所示:

式中,N为PN码的长度,I、Q两路的DMF结构如图1所示。若输入I、Q两路样值序列的速率为Ns/chip,由于DMF仅对相互间隔一个chip的样值序列进行相关运算,因此每个抽头之间的时间延迟为一个码片的时间宽度TC,延迟寄存器的数目为N。图1中乘法器的参数取值为+1或-1,由本地PN码确定。

图1 DMF结构
1.2 DMF的参数选取
量化比特数是DMF设计中一个非常重要的参数,量化比特数越高,DMF的性能越好,但硬件代价也越大。在实际中量化比特数总是有限的,文献[6]提出在1 bit量化DS/CDMA系统中,在一定的处理增益下采用与数据帧格式相结合的扩频方式即能保证可靠的同步捕获又能满足一定的误码率要求;文献[6]表明当量化比特数为6时,系统的误码率曲线几乎与模拟相关时的曲线一致;当量化比特数为3时,系统损失<2 dB。考虑到长码扩频需要的DMF长度较长,避免硬件资源太大采用3 bit量化方案。
取样间隔是DMF设计中另一个非常重要的参数,取样间隔越多,DMF的性能越好,但需要的DMF的长度越长,硬件代价也越大,特别是在高增益直扩系统中甚至难以实现,设计时必须根据系统要求折中处理。按照采样定理要求,确保信号无失真的最小采样倍数为2倍采样,若每个码元2倍取样后送入DMF电路,DMF在每个PN码周期内将会有2个相关峰输出,使得相关峰变得模糊,导致同步电路性能变差。文献[7]提出在2倍抽样率时,通过在DMF前边增加前端处理电路,可使系统误码率与10倍取样间隔的效果一致,前端处理算法为:

前端处理算法等效于低通滤波器,使得在2倍采样时2个相关峰变成一个更加尖锐的相关峰,利于环路的捕获和时钟同步。
1.3 时间窗时钟同步提取算法
时间窗时钟同步提取法基于匹配滤波器输出信号提取同步,DMF输出信号为伪码的自相关函数值,将其I和Q路信号取绝对值再相加,则和信号为功率值,通过对自相关峰值捕获后从而提取时钟同步的起始相位,由于收发时钟的差异及多普勒频移的影响,必须对频差进行修正,DMF每个数据比特输出一个相关峰,只要提取出2个相关峰值时间间隔的变化,就能够修正时钟的变化。基于这个思路,提出如下的时间窗时钟同步提取算法,如图2所示。

图2 时间窗同步提出流程
具体流程为:
①首先由搜索电路确定DMF输出相关峰的初始位置,为降低漏检概率可以连续搜索N圈;
②如果连续N圈的最大值位置不一致,则返回①,重新搜索;反之则认为搜索到了相关峰的初始位置,并将此位置记为零时刻,并距此一个数据比特间隔生成第一个时间窗,以期待能够检测到下一个相关峰;
③在每个周期的零时刻利用⑤返回的误差修正最大值位置;
④在时间窗内找最大值并与噪声门限比较,若小于噪声门限,失锁计数器加1,否则,失所技术器清零。若失锁计数器大于设定值M则认为失锁返回①;若失锁计数器小于设定值则进入⑤;
⑤将时间窗中最大值时刻对应的DMF输出样值送往解调及译码电路,并计算时间窗中最大值时刻和时间窗中点的时间差,对误差进行N次统计平均,然后把误差返回给③,以零时刻为周期输出同步时钟。
图2算法中第①步的搜索N圈是为了提高捕获概率,降低漏检概率,但是N值不能太大,太大会造成低信噪比下捕获困难,N一般取3合适。第④步中的M次统计失锁值是为了降低误判概率,防止由于多径或衰落造成捕获电路误判出锁。当时钟无偏差时,时间窗内的相关峰的最大值将出现时间窗的中点,时间窗之间的间隔固定为一个数据比特宽度T;若本地频率大于发射频率,即时钟频差增大,则第⑤步计算出的误差为正值,其值为T-T’;在第③步时应使最大值位置向前调整,确保下一个相关峰不会跑出时间窗。时间窗宽度越小恢复出时钟的性能越好。但抗时钟频偏能力及抗多径能量降低,所以时间窗宽度的选取应考虑时钟频偏及多径因素。
2 解扩解调器实现
采用基于DMF结构的时间窗捕获算法的解扩解调器实现框图如图3所示。解扩解调器中,输入中频为140 MHz,PN 码速率为16.384 Mbps,ADC 以5 倍PN码速率对输入中频信号采样,经过数字下变频低通滤波后滤除镜像频率,得到5倍PN码速率的基带信号,经过2倍内插5倍抽取后,送给DMF两倍采样的信息,PN码为1 023位m序列,DMF长度为2 046位,PN码存放在寄存器中,DMF输出数据经功率检测、时间窗时钟同步提取和差分解调后输出。
3 抗多径性能测试及结果分析
根据无人机飞行过程中2径模型[8-11]的分析,飞行过程和起降阶段的信道分别选择莱斯因子为10 dB和6 dB的莱斯信道。用信道模拟器对该算法在不同信噪比条件下进行误码性能测试。经测试,该算法在莱斯信道中捕获速度快且工作稳定,误码率曲线如图4所示,从图4可以看出该算法解调损失<2 dB,而串行捕获算法在此条件下频繁失锁,已不能正常工作。
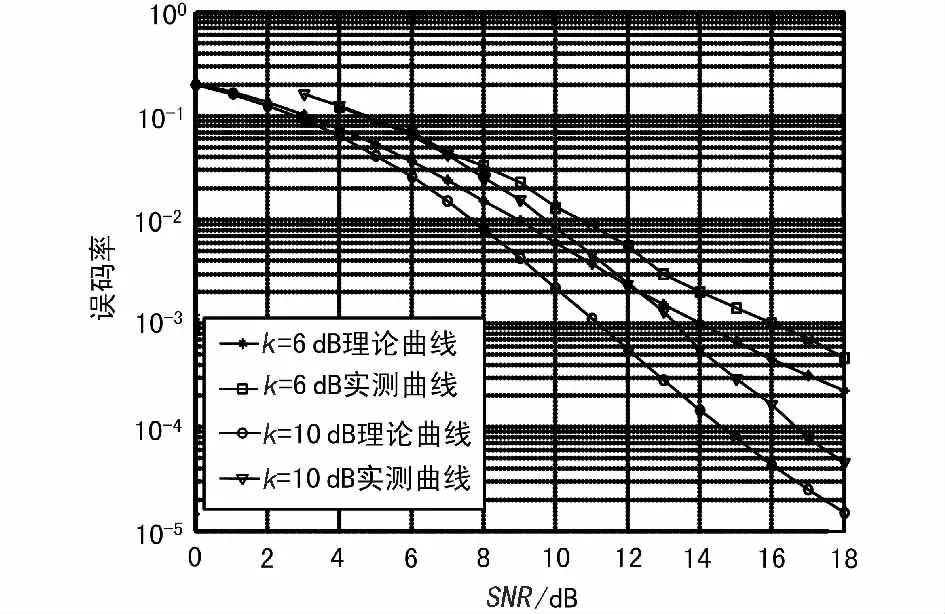
图4 莱斯信道误码率曲线
4 结束语
无人机在低仰角条件下飞行时,传统的延迟锁定环受多径衰落影响容易失锁,而串行捕获的滑动相关法导致重新捕获时间较长。利用基于数字匹配滤波器(DMF)结构的时间窗捕获算法,结合开环结构的时间窗定时同步方法,可显著增强无人机数据链在衰落信道下通信的可靠性,在无人机通信领域具有广阔的应用前景。
[1]梁保卫,高红涛.无人机飞行过程信号弱区的分析[J].无线电工程,2006,36(7):36 -38.
[2]王 东,李志勇,白立锋,等.地空信道特性研究[J].无线电通信技术,2009,35(3):32 -35.
[3]LEE Sung-won.Low-power Hybrid Structure of Digital Matched Filters for Direct Sequence Spread Spectrum Systems[J].Department of Electrical Engineering and Computer Science,2003:685 -688.
[4]项家伟,韦志棉,熊小军,等.一种基于数字匹配滤波器的伪码捕获方法[J].无线电工程,2011,41(11):28-30.
[5]刘会红.并行数字匹配滤波器的设计[J].无线电工程,2011,41(7):62 -64.
[6]胡捍英,邬江兴,樊昌信,等.1bit量化相关接收 DS/CDMA通信方式及性能[J].西安电子科技大学学报,2002,29(4):439 -443.
[7]曾兴雯,贺彦国,李 栋,等.DS_CDMA多比特量化相关接收性能分析[J].西安电子科技大学学报,2002,29(4):439-443.
[8]高保生,朱良彬.无人机低空链路信道特性与宽带数据传输[J].系统工程与电子技术,2005(2):1-3.
[9]白 洋,梁 俊,张 强,等.基于二维扩频技术的无人机控制链路抗衰落技术研究[J].空间电子技术,2011(1):42-45.
[10]黄 振,杨士中.直扩系统数字匹配滤波器的设计仿真[J].电讯技术,2002,27(12):8 -13.
[11]SHEN Ye-bing,WANG Yu-xi.Optimized FPGA Realization of Digital Matched Filter in Spread Spectrum Communication Systems[J].Computer and Information Technology Workshop,2008:173-176.
猜你喜欢
雷达与对抗(2022年1期)2022-03-31 05:18:20
数学小灵通(1-2年级)(2020年11期)2020-12-28 00:41:14
小学生学习指导(低年级)(2019年3期)2019-04-22 03:34:44
海峡姐妹(2017年10期)2017-12-19 12:26:20
三联生活周刊(2017年33期)2017-08-11 04:35:44
银行家(2017年1期)2017-02-15 20:27:20
读写算·小学低年级(2014年4期)2014-07-24 22:42:55
计算机应用文摘(2014年1期)2014-04-29 00:44:03
单片机与嵌入式系统应用(2014年7期)2014-03-24 19:12:05
铁路通信信号工程技术(2014年3期)2014-02-28 16:56:24