变质心再入飞行器自抗扰控制器设计*
2014-06-12 12:16:19耿克达
火力与指挥控制 2014年9期
耿克达,周 军,林 鹏
(西北工业大学精确制导与控制研究所,西安 710072)
变质心再入飞行器自抗扰控制器设计*
耿克达,周 军,林 鹏
(西北工业大学精确制导与控制研究所,西安 710072)
再入飞行器采用变质心控制不但可以保持较好的气动外形,还町以增大机动能力,但变质心控制较强的非线性和耦合性大大增加了控制系统设计难度,使控制器设计和实施的代价较高。针对这一问题,基于自抗扰控制技术,设计了变质心再入飞行器双通道解耦控制器。通过构造连续光滑扩张状态观测器,不加区分飞行器的各类干扰与耦合,对其统一进行估计:利用非线性状态反馈控制律,并自适应调节控制参数对其进行补偿,实现对飞行器姿态的解耦控制。仿真结果表明:该方法大大降低了对系统模型精度的要求与控制器设计实施代价,对变质心再入飞行器非线性、耦合性以及参数摄动具有较强的鲁棒性。
变质心再入飞行器,自抗扰控制,解耦,扩张状态观测器
Introduction
By changing the centroid of the vehicle system, moving mass control[1-3],which is a new orbital transfer technology of vehicle,makes use of the aerodynamic force and torque caused by high velocity to control the attitude.
However,because of centroid movement,the inertial axes of vehicle are changed.At the same time,the disturb torque and control coupling caused by mass block make the MmRV more serious coupling,nonlinear and model uncertain,which increases the difficulty for control system design[1-2].Ref[4]studied the de sign of H∞ robust controller for mass moment inter-ceptor;Ref[5]using the Bang-Bang control and sliding mode control to design the reentry vehicle mass moment compound control system;Ref[6]adopted double loop sliding mode control to design the high performance controller for spin warhead,and analyzed the stability of system by using Lyapunov function.However,these methods need to craft more state feedback,or uncertain perturbation boundary information,which makes the cost of controller design and implementation higher.
Thus,in order to solve the conflict between the performance and the cost of moving mass controller,the paper designs the double channels decoupling controllers base on Active disturbance rejection control(ADRC)technology.
ADRC proposed by Han Jing-qing is a new control technology for uncertain system.It takes system inner disturbance perturbation of model and parameters and unmeasured external disturbance as the unknown“total disturbance”,which is estimated and compensated to enhance the robustness of control system in real time by applying extended state observer(ESO).By this way,ADRC greatly reduces the requirement of model precision and the cost of controller design.
The paper at first gives the vehicle control model;then estimates the coupling,inertial disturbance and parameters perturbation together by constructing the continuous smooth extended state observer;at last implements the compensation for disturbances of each channel and decoupling control for vehicle by utilizing nonlinear state error feedback law and actively adjusting the control parameters.Simulation verifies the efficiency of the method.
1 Model of MmRV
Selecting the reentry coordinate Oexeyezeas the inertial reference coordinate system for the movement of MmRV,the body coordinate Obxbybzbas the reference coordinate system for the attitude movement of MmRV. C is the vehicle shell(excluding the MmA)centroid,S is the overall centroid of the reentry vehicle system(including the MmA),msis the total mass;Reentry vehicle adopts two-dimension MmA,which is composed by two sliding mass blocks that can move along the vertical and horizontal axis of vehicle respectively.While the pitch and yaw channels are controlled by MmA,the roll stability is controlled by other actuator of vehicle.The mass of two blocks are mAand mB,the centroids expressed in body coordinate are rCA=(la,ly,0)T,rCB=(lb,0,lz)T.
Ignoring the moment inertia of MmA,the dynamic equations based on vehicle centroid C are expressed as eq.1.

In eq.1,

2 Design of ARDC
2.1 Model Transformation
In view of the model eq.1,taking the channel coupling and the inertia product caused by MmA as the unknown disturbances,and extracting the main control variables of each channel to transform the model.Since the MmA in the paper only controls the pitch and yaw channels,we extract the two channels rotation equations as eq.3.

Where,fβ0,fα0are the nonlinear functions including the parameters of vehicle overall,aerodynamic and MmA.Selecting the state variables as,control variables as,the differential equations are:
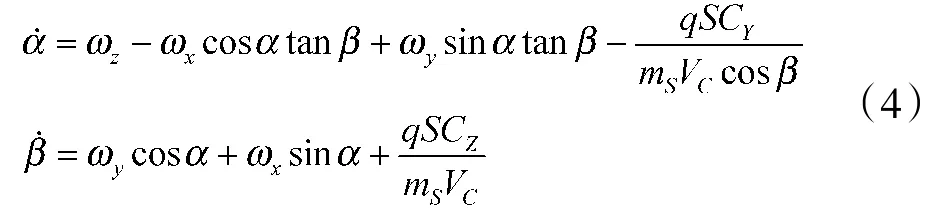
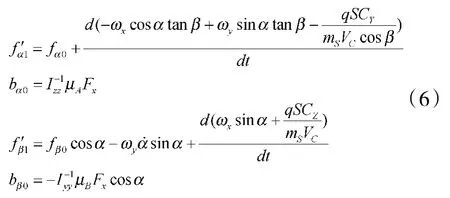
Making derivation to eq.4,and considering the model uncertainty of system,the control model of pitchand yaw channels can be obtained as eq.5.

Where,
Eq.5 shows that there are serious nonlinear,coupling and time-variable characteristics in MmRV. Considering the control system robustness and design cost,the paper applies the ARDC technology,taking the coupling and all kinds of perturbation as unknown"total disturbance"of each channel indiscriminately,which is estimated and compensated by extended state observer,to design the double channels active disturbance rejection controllers(ADRCs)independently.
2.2 Structure of double channels ADRCs
The structure of double channels ADRCs for Mm RV is shown in Fig.1,where,is the MmA servo system.
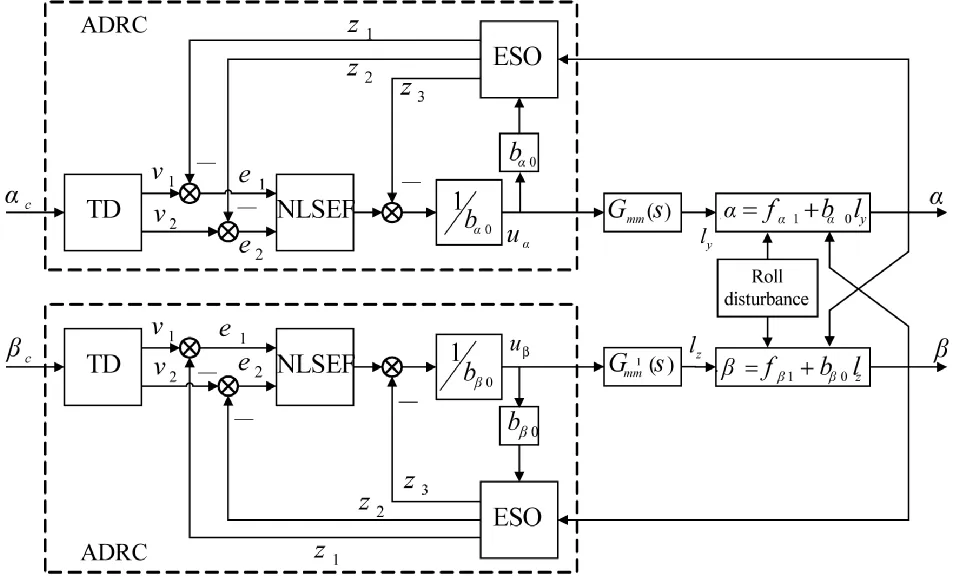
Fig.1 Structure of double channels ADRC for MmRV
It is shown in Fig.1 that the ADRC is composed of 3 parts mainly:tracking differentiator(TD),extended state observer(ESO)and nonlinear state error feedback(NLSEF)[7].TD is used to arrange the transient dy namics for command signal,from which we could obtain the smooth input signal and its differential signal for the controller.ESO is used to estimate the"total disturbances"of each channels,which is compensated by NLSEF.By this way,ADRCs implements the decou pling control of pitch and yaw channels,so the controllers could be designed independently.
2.3 The separate design of ADRC
Since the 3 parts of ADRC have special effect and physical signification,every parts could be designed separately.Consider that the control mechanism of pitch and yaw channels is similar,the paper only introduces the ADRC design of pitch channel.
(1)TD:The input of TD is attack angle command αc.It applies 2 outputs:smooth tracking signal v1of command and its differential signal v2.Arranging the transient dynamics for command signal by TD restrains the system overshoot and noise affect.The discrete algorithm of pitch channel TD is shown in eq.7.
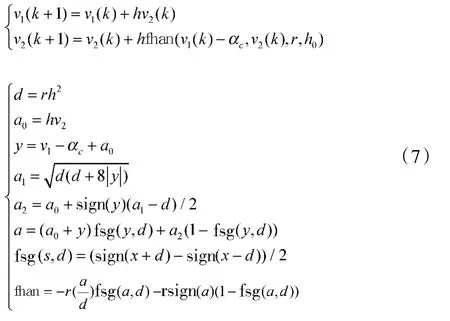
where,h0is filter parameter.Increasing h0will enhance the filter performance.r is the control parameter that is adjusted according to system tracking ability and used to regulate risetime of transient dynamics.
(2)ESO:For pitch channel,ESO applies 3 outputs:z1,z2and z3.z1,z2are the tracking signal and differential signal of vehicle attack angle respectively,z3is the estimative value of pitch channel total disturbances fα1.ESO,which could estimate the system disturbances well,is the core of ADRC technology.Using appropriate measure to compensate the estimative value of ESO can enhance the tracking capability and robustness of control system.The discrete algorithm of pitch channel is s hown in eq.8.

where,β01,β02,β03,β01,β02,δ are the control parameters that determine the estimate precision together.u(k)is the measurable output of MmA servo system. Generally,a01=0.5,a02=0.25,β01,β02,β03could be adjusted according to the sampling step and correlative design rules.
In eq.8,nonlinear function fal(e,a,δ)makes great effect to the capabilities of ESO and ARDC.On the one hand,since fal(e,a,δ)is non-derivable,smaller δ will cause the derivative mutation of function and high-frequency flutter,which debases the control character;on the other hand,bigger δ will debase the precision of estimate and control[8].Therefore,the paper improves the linear part of fal(e,a,δ)to a continuous finite differentiable function fal(e,a,δ).

To make sure the function continuous differentiable,there are

Solving the eq.9 and eq.10 simultaneously,the function is obtained as
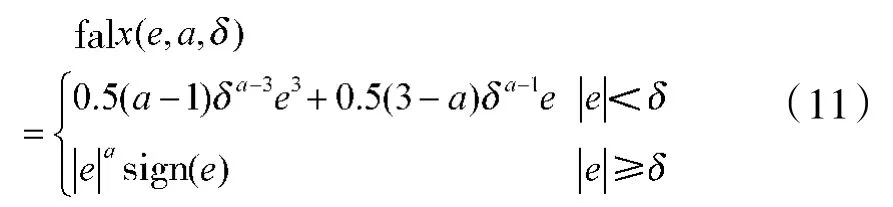
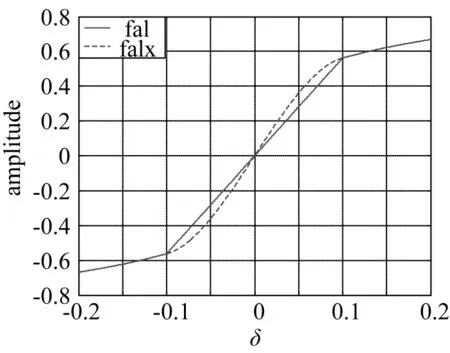
Fig.2 Compared curves of fal(·)and falx(·)
The simulation curves of fal(·)and falx(·)are shown in Fig.2.It shows that falx(·)is smooth and differentiable,which could be sued to avoid high-frequency flutter effectively.More than that,falx(·)still satisfies the characteristic that"large error with small gain,small error with large gain",which could be used to restrain the system error.
(3)NLSEF:Compared with linearstate error feedback,NLSEF could obtain more efficient control effect.It restrains and compensates the system error quickly,which avoid the negative effect of integral of PID.The discrete algorithm of NLSEF in the paper is shown in eq.12.
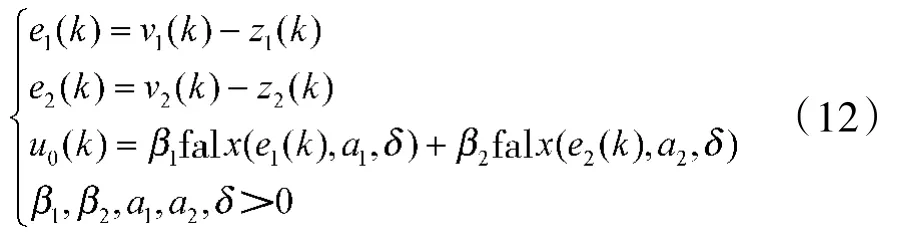
where,the expression of falx(·)is shown in eq.11. β1,β2,a1,a2are control parameters and a1<1<a2.u0(k)is the virtual equivalent control law.Introducing the disturbances compensation,the final real control v ariable is obtained as

Bringing eq.13 into eq.5,closed loop system i s expressed as

According to Ref[7],above system is proved to be steady.For improving the control capability,the paper adjusts the control parameters by utilizing the system error as

Where,E is the absolute value of maximum static error at given signal.Eq.14 shows that,when the error increases,β1will increase to enhance the system rapidity;when the error decreases,β2will decrease to enhance the control precision.
Above all,for pitch channel ARDC,it is not necessary to obtain the precise system or external disturbance model,instead simply acknowledging α and output of MmA u is good enough.By this way,we greatly reduce the costofcontrolsystem design and implementation.
3 Simulation Results
In order to demonstrate the effectiveness of the ADRCs proposed in the paper,taking a feature point of certain MmRV for instance to simulate the control for double channels.The parameters of vehicle and MmA are shown in Tab.1 and Tab.2,where,Lrf,Srfare the reference length and area of vehicle.
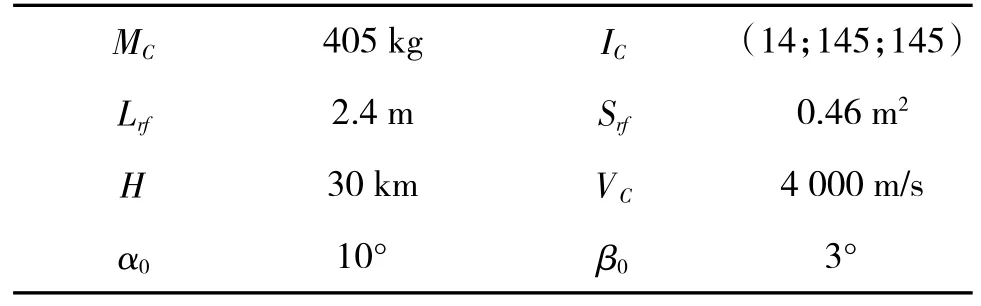
Tab.1 Parameters of vehicle
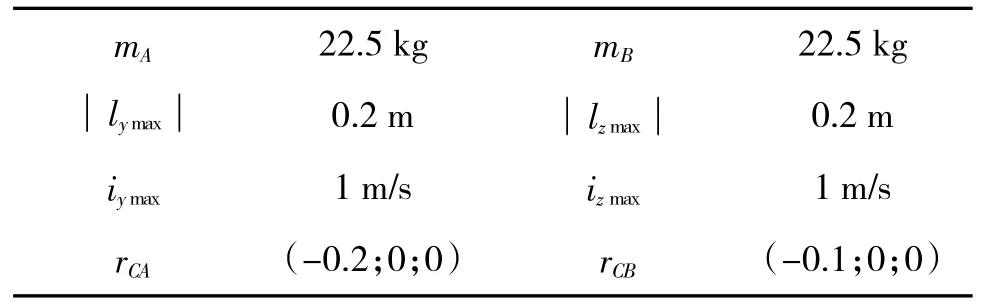
Tab.2 Parameters of moving mass actuator
The maximum aerodynamic perturbation is 20%,the maximum mass perturbation is 2%.Partial control parameters of pitch channel are shown below.

The tracking curves of attack angle and sideslip angle of nominal model and perturbation model are shown in fig.3,fig.4.
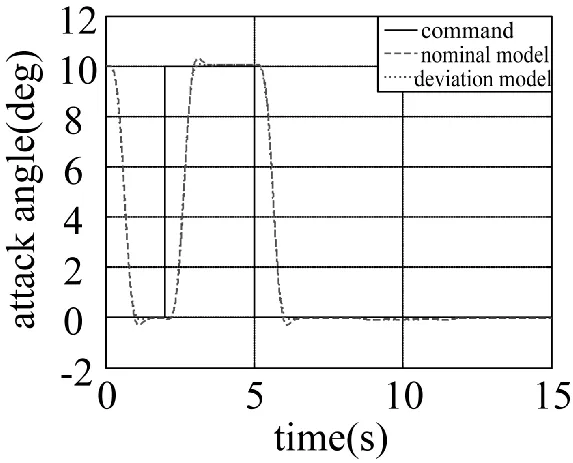
Fig.3 Tracking curves of attack angle
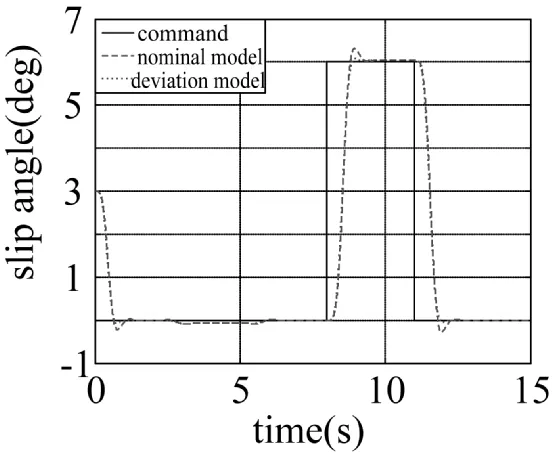
Fig.4 Tracking curves of sideslip angle
The simulation results show that:
(1)in the nominal case,attack angle and sideslip angle could track the commands signal quickly without overshoot,system has good dynamic quality and higher tracking precision,each channel's static error is less than 0.6%;
(2)in the case of a wide range of parameters perturbation,the tracking performance of each channel has barely changed.the control system shows strong robustness.
In order to verify the effectiveness of ESOs,the estimative values and real values of total disturbance of each channel are shown in fig.5,fig.6.The curves show that ESOs have high estimated precision and good tracking performance.
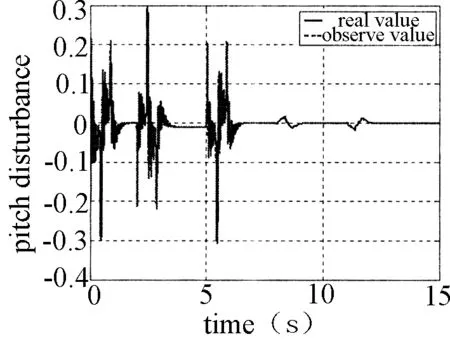
Fig.5 Disturbance estimate curves of pitch channel
Fig.6 is the moving curves of sliding masses of double channels.The curves show that the maxim displacements of sliding masses are 0.08 m,which means the Mmc has high effiency.
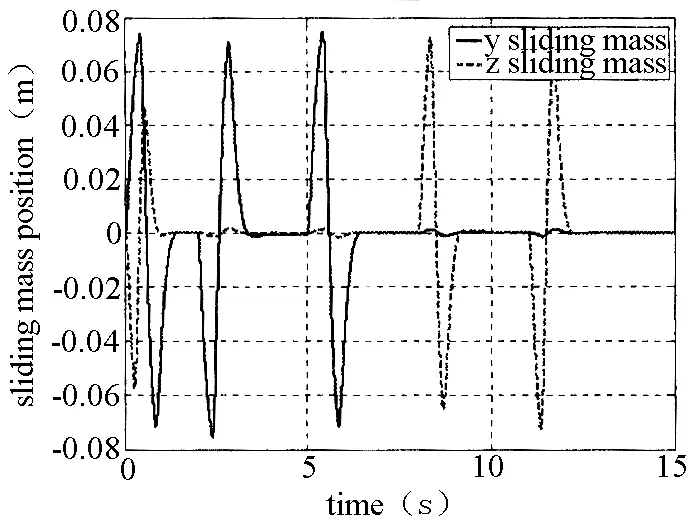
Fig.6 Disturbance estimate curves of yaw channel
4 Conclusion
(1)ADRC of MmRV has good dynamic quality,tracking precision and strong robustness for nonlinearity,coupling and parameters perturbation of vehicle;
(2)Using ADRC greatly reduces the requirement for model precision;
(3) Using ADRC reducesthe design and implementation cost of controller,which has certain engineering application value.
Reference:
[1]Woolsey C A.Reduced Hamiltonian Dynamics for a Rigid Body Coupled to a Moving Point Mass[J].Journal of Guidance,Control,and Dynamics,2005,28(1):131-138.
[2]Vaddi S S.Moving Mass Actuated Missile Control Using Convex Optimization Techniques[C]//AIAA Guidance,Naviga-
Active Disturbance Rejection Control for Moving Mass Reentry Vehicle
GENG Ke-da,ZHOU Jun,LIN Peng
(Institute of Precision Guidance and Control,Northwestern Polytechnical University,Xi'an 710072,China)
Moving mass reentry vehicle (MmRV)has better aerodynamic configuration and maneuverability.However,the serious nonlinearity and coupling of moving mass control greatly increases the difficulty of control system design,which makes the cost of controller design and implement higher.In order to solve this problem,in the paper we design a double channels decoupling controller of MmRV based on the Active disturbance rejection control technology.By constructing a continuous smooth extended state observer,the controller estimates all kinds of vehicle disturbance and coupling indiscriminately;then compensates the estimative value by utilizing nonlinear state error feedback and adaptively adjusting the controller parameters to implement the decoupling control of vehicle attitude.Simulation results show that this method not only greatly reduces the requirement for prevision of system model and the cost of controller design and implementation,but also has strong robustness for nonlinearity,coupling and parameter perturbation of MmRV.
moving mass reentry vehicle,active disturbance rejection control,decoupling,extended state observer
V448.12
A
1002-0640(2014)09-0126-05
2013-06-05
2013-09-03
高等学校博士学科点专项科研基金资助项目
耿克达(1985- ),男,河北石家庄人,博士研究生。研究方向:导航、制导与控制。
猜你喜欢
丝路艺术(2018年12期)2018-12-12 08:20:28
丝路艺术(2018年11期)2018-09-21 08:31:30
西北工业大学学报(2016年6期)2017-01-03 08:36:22
北京航空航天大学学报(2016年9期)2016-11-16 02:02:36
北京航空航天大学学报(2016年7期)2016-11-16 01:51:00
北京航空航天大学学报(2016年4期)2016-02-27 06:32:09
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
太空探索(2014年1期)2014-07-10 13:41:49