
野外无人值守森林实时监控与报警系统研究
2014-06-08 01:13杨华
环境监控与预警 2014年3期
杨华
(山东正安安全环境科技发展有限公司,山东 济南 250100)
森林作为巨大的陆地生态系统的主体,在调节生物、大气、水等动态平衡中具有重要作用。近年来,在野外林区毁林开矿、毁林开发旅游区等事件屡屡被曝光。因此,在野外林区如何进行森林植被的监控成了急需解决的问题。
对森林植被的监控目前有以下几种常用方法:定期调查、遥感、巡视、举报等。
然而定期调查的时效性差,远不能满足现代林业建设的要求,各地森林资源档案管理和年度更新滞后,不能准确反映森林资源的现状及变化[1-2]。遥感技术只能对大面积森林进行监控,无法看到细节,渐进式的森林砍伐难以被发现[3-5]。巡视和举报的方法具有很强的不确定性,无法作为常规监控手段[6]。尤其是目前的各种植被监控手段均无法对正在发生的植被破坏事件进行实时监控,即使监控到植被破坏也无法找到肇事者,难以保证植被保护的持续性。
提出采用实现植被状况的前端智能判断与实时监控结合的技术,一旦判断出植被情况发生变化,系统会将报警信息传递给中心,并且上传当前的监控画面。主动报警的机制与传统的各点巡视的机制相比可以节省大量的时间与人力,工作效率大幅度提升。
1 系统框架
系统主要由终端与中心软件两部分组成,中心软件采用通用的电子地图平台实现。终端包括供电装置、智能主控板与数字摄像头3个部分,终端框架如图1所示。供电装置由太阳能电池板、控制器与蓄电池组成,电池板收集太阳能并转换为电能,通过控制器将电压稳定在12V直流电压,在阳光充足时,控制器在给系统提供电力的同时给蓄电池充电,在没有阳光时,通过蓄电池给系统供电。数字摄像头拍摄需要保护的植被,并将图像传递给主控板。主控板由Hi 3515视频处理芯片、GSM模块与GPS模块组成。Hi 3515视频处理芯片将数字摄像头捕捉到的视频图像按帧抽取出来,判断植被的颜色变化,根据设定的阈值判断植被的颜色变化是否超出合理的范围,如果超过阈值,则认为此时的植被可能正在发生较大的变化,系统立刻会通过GSM模块向中心发送报警信息,同时会将GPS采集的位置信息与摄像头采集的图像信息一并传递到中心软件,中心收到报警信息之后会立刻查看当前检测点的植被保护情况,判断当前是否正在发生滥砍滥伐的情况,同时通过GPS迅速定位滥砍滥伐的具体位置,做到实时抓捕。
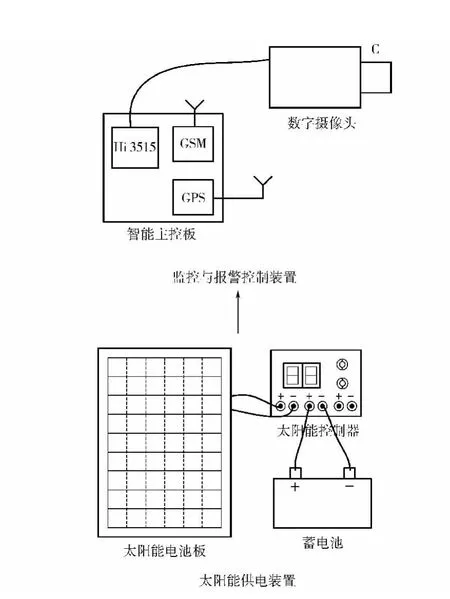
图1 植被保护监控与报警终端框架
太阳能电池板的供电效率不高,如果要实现系统不间断运行,太阳能电池板的面积过大,不仅安装不方便,也不容易隐敝安装。因此,根据不同地区的阳光情况,适当选择较小面积的电池板,一般不超过50 W。由于该系统的特点并不要求对系统进行24 h不间断运行,因此可以采用每小时开机5 min,其余时间休眠以节省电力的方式,这样可以大幅度减少电池板的尺寸与蓄电池的容量,降低系统成本。
数据的采集与传输采用海思半导体的Hi 3515为主芯片,该芯片是一款功能强大的H.264编解码处理器芯片,内嵌ARM 9核,支持Linux操作系统。该芯片支持数字摄像机接口,MPEG/JPEG最大支持300万像素的编码,帧率5 fps;支持2个RS 232标准串口;支持SD卡等,智能主控板的技术框图如图2所示,数字摄像机的视频信号通过BT.656协议接入到Hi 3515芯片的VI 0接口,通过音视频编码之后传递给内置的ARM 9处理器,同时处理器接收到GPS模块通过串口传递过来的当前位置信息,处理器解析GPS信息之后取出经纬度与时间信息,同时将拍摄的照片的色度提取出来,将这两种信息打包保存在SD卡中,同时通过串口发送给GSM模块,GSM模块采用短信的方式发送到中心服务器连接的GSM模块,从而通过中心服务程序进入中心数据库。
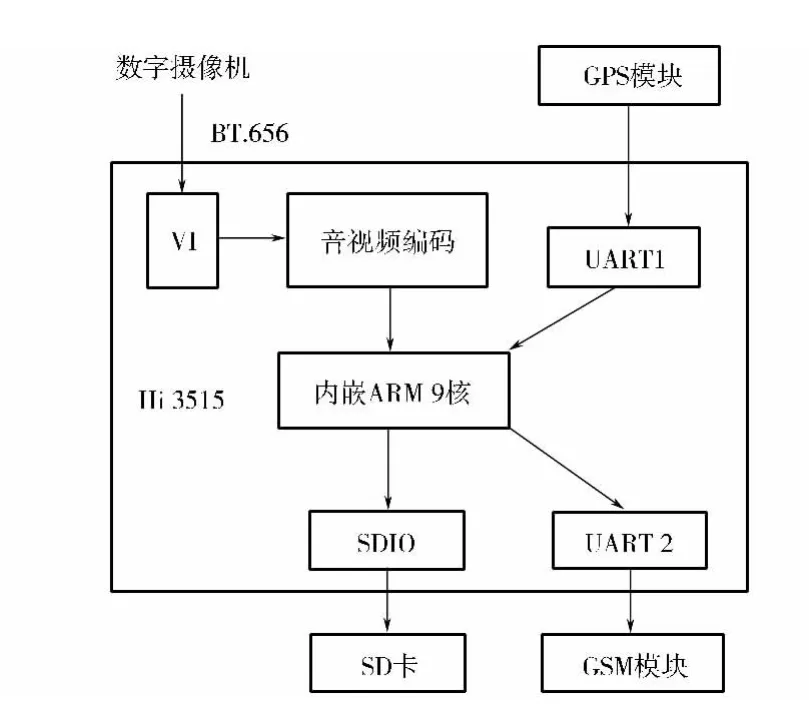
图2 智能主控板技术框架与信息流向
Hi 3515芯片提供Linux下开发的SDK开发包,提供基本的图像处理方法与系统工具,为系统的开发提供了技术保障,处理流程如图3所示。
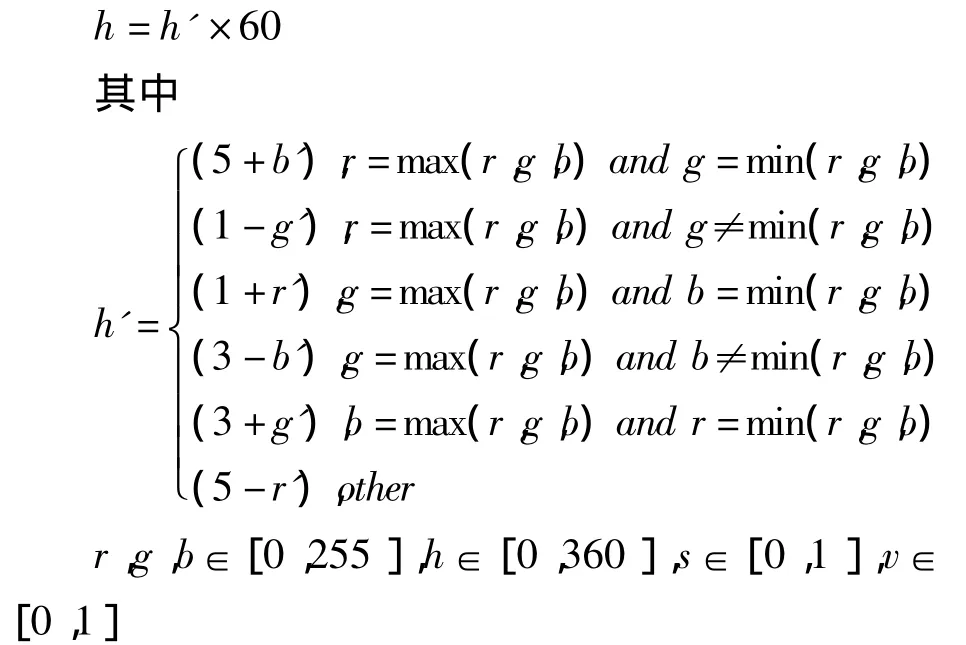
其中RGB图像转换至HSV空间并提取色度的方法是将给定 RGB 颜色空间的值(r,g,b),r,g,b∈[0,1,…,255]转换到 HSV 空间的h,s,v值,计算公式如下:
设v'=max(r,g,b)。定义r',g',b'为:

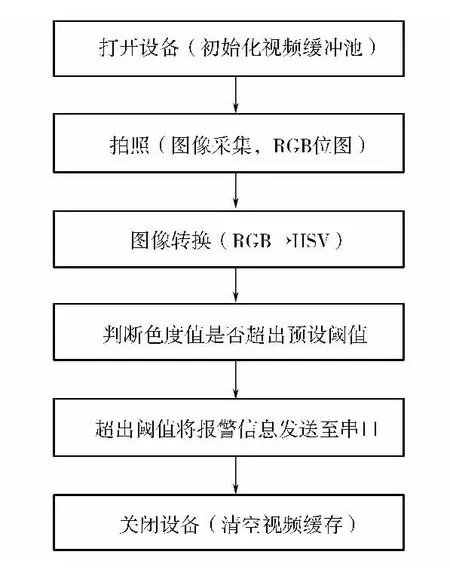
图3 软件处理流程
2 结果与讨论
2.1 不同植被覆盖率下的图像结果
同一地点不同植被覆盖的拍摄图片如图4(a)(b)(c)所示,(a)中植被覆盖率比较大,植被茂密,包含了大量较高、较粗的树木;(b)中植被基本上是以低矮的灌木为主,植被覆盖率较小;(c)中只有裸露的沙土,几乎没有植被覆盖。
按照提出的算法对不同植被覆盖下的拍摄图片进行处理,可以得到3张图片的颜色分量,结果如图5所示。计算得出的不同的颜色角度值对应不同的颜色。计算得到的3张图片的颜色角度值分别为:(a)111.04,(b)161.57,(c)70.838。在色域分析图上标注这3个角度,可以清楚地看到3张图片对应的颜色值分别位于绿色、青色与黄色附近。根据该角度值,可以很容易判断出当前植被的颜色,从而判断植被的覆盖情况。根据不同的季节和时段设定植被颜色变化的阈值,如果植被颜色变化在短时间内超出阈值,则向中心发出报警信息并返回当前位置与图像。
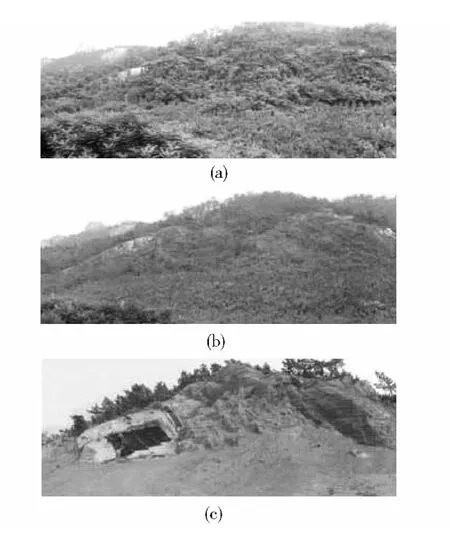
图4 同一地点不同植被覆盖率
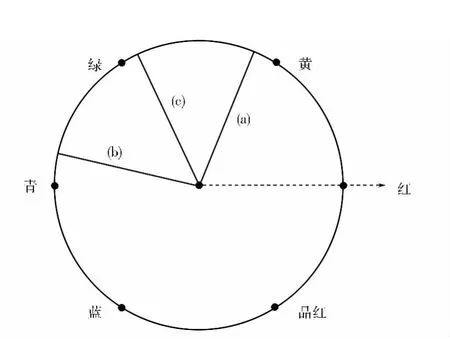
图5 图4中图片的颜色分量示意
2.2 固定镜头下采样的处理结果
采用摄像头采集信息,即使摄像头固定,采集到的图像也会在风的作用下不断变化,因此必须考虑风的作用对采集信息的影响。图6是不同时间点对植被采样的图像,从整体看图像几乎没有变化,但是从细节上看,树木会随着风的吹动不断晃动,同时也会有过往的车辆和其他飞禽的影响。
将图6中的12次采样获得图像进行颜色计算,颜色分量均在127度附近上下波动,根据这种情况,在计算点的上下分别设置A和B两个阈值,A=130°;B=124°,阈值之间的差值为 6°,如图 7所示。因此当摄像头固定情况较好时,自然环境影响引起的变化可以用两个比较接近的阈值,如果监控图像采样的值超过A值或者低于B值,则立刻进行报警。
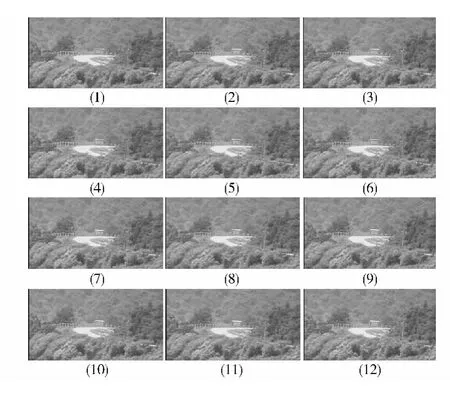
图6 在不同时间点采样的视频图像
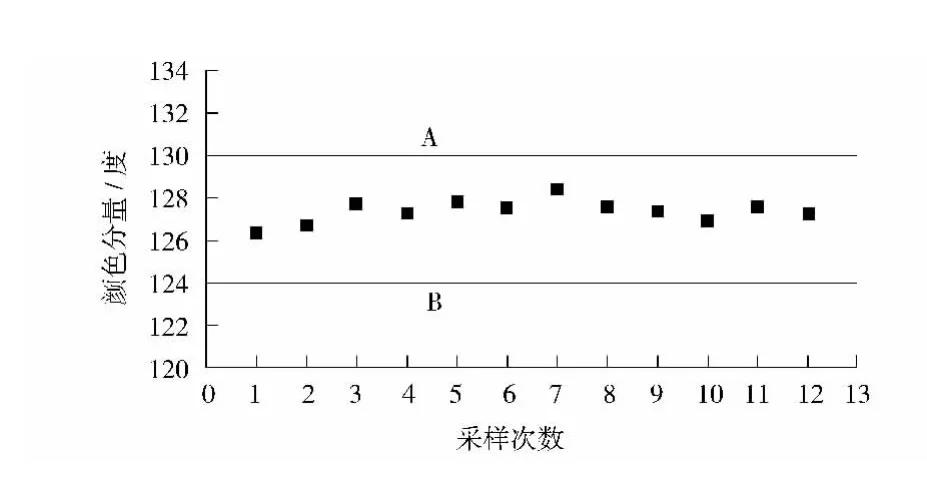
图7 固定摄像头不同时段采样的颜色计算结果
将阈值A和B标注在颜色空间图上,结果如图8所示,从图中可以看出,固定摄像头时,短时间内颜色的变化非常小。如果超过阈值则立刻报警。
如果采用5 min之内的平均值来表示一次采样则会将自然界产生的影响大幅度减少,从而大大提高计算值的准确程度,通过此改进可以进一步减少阈值设定的范围,提升精确度。
2.3 镜头晃动时采样的处理结果
在实际的应用情况下,摄像头往往也会随着云台的晃动而不断晃动,拍摄下来的图像也会出现很大的偏差;同时镜头自动聚焦功能也会导致图像的变化。这些因素都考虑进去之后,模拟了摄像机晃动时的图像情况(图9),从图中看出,摄像机的焦距有变化,同时摄像机对准的位置也在发生变化。
计算图9中的9次采样的颜色计算结果(图10)。从图10中看出,颜色计算结果在120°附近上下浮动,与固定摄像头相比较,上下浮动的范围稍大。选定阈值 A=126°,B=114°,两者的差值为12°,是摄像头固定时的2倍。将该阈值在颜色空间图上标注出来(图11),与图8相比,阈值包含的范围明显增大。如果同样采用5 min之内取平均值得方法计算颜色的采样值,则阈值的范围可以明显缩小,提升计算精确度。
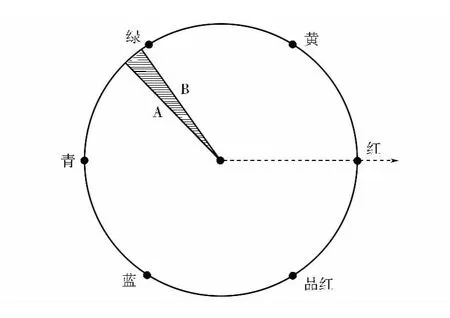
图8 固定摄像头颜色阈值设定示意
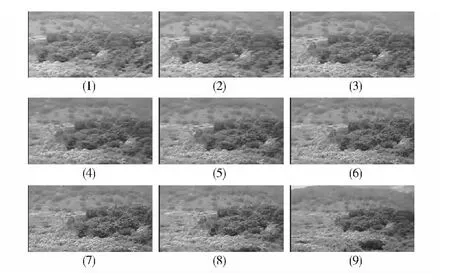
图9 摄像机晃动时拍摄的植被图像
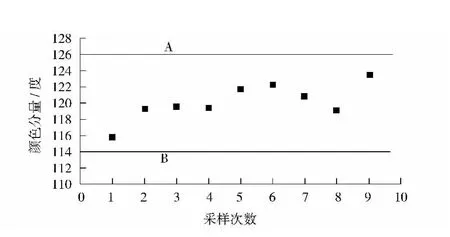
图10 摄像头晃动时不同时段采样的颜色计算结果
3 结论
通过太阳能供电,利用数字摄像头采集野外植被的现场图像,将图像从RGB空间转换到HSV空间,求取图像颜色在颜色空间中的平均角度,根据颜色角度的值判断当前植被的覆盖情况,并且根据5 min之内的平均值减小阈值范围,提升精确度。设置颜色角度判断的上下两个阈值,如果当前测量值超过该阈值即通过GSM模块向中心报警并上传位置与当前图像。实验结果表明,通过该方式实时监控植被的破坏情况,可以大幅度降低监管人员的劳动强度,提高工作效率与成功率。
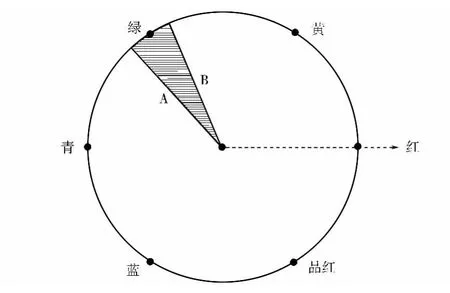
图11 摄像头晃动时颜色阈值设定示意
[1]楼毅,韦希勤.华东监测区森林资源监测体系现状及其完善对策[J].华东森林经理,2011,25(2):39 -44.
[2]张会儒,鞠洪波.荒漠化监测中县级植被监测和评价信息系统的框架结构[J].林业资源管理,2006(4):96 -101.
[3]张旭,刘新春,肖继东,等.EOS/MODIS影像处理在塔里木河下游植被监测中的应用[J].干旱区研究,2005,22(4):532-536.
[4]李忠平,黄国胜,曾伟生,等.巴西森林资源监测及遥感技术应用的基本做法和启示[J].林业资源管理,2012(5):125-128.
[5]吕妙儿,蒲英霞,黄杏元.城市绿地监测遥感应用[J].中国园林,2000,16(71):41 -44.
[6]黄宁辉.基于VRS技术的 GPS-PDA在森林资源调查监测中的应用[J].林业调查规划,2012,37(3):9-14.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
河北地质(2022年2期)2022-08-22
汽车工程师(2021年12期)2022-01-18
科学大众(2020年17期)2020-10-27
铁道通信信号(2018年5期)2018-06-28
现代园艺(2017年23期)2018-01-18
汽车维护与修理(2016年10期)2016-07-10
应用海洋学学报(2015年2期)2015-11-22
小学生·多元智能大王(2015年3期)2015-05-25
汽车维修与保养(2015年8期)2015-04-17
