
空气悬架电控系统的参数自整定模糊控制
2014-06-07 05:53于微波杜遵生杨听听
长春工业大学学报 2014年1期
于微波, 杜遵生, 杨听听
(长春工业大学电气与电子工程学院,吉林长春 130012)
空气悬架电控系统的参数自整定模糊控制
于微波, 杜遵生, 杨听听
(长春工业大学电气与电子工程学院,吉林长春 130012)
以微型客车四分之一车辆模型为被控对象,分析了空气弹簧的特性,提出了参数自调整模糊控制策略。设计了一套功能优良的汽车空气悬架电控装置并进行了模拟实验,实验结果表明,该方法能够有效地降低车身垂直加速度,改善车辆的综合性能,提高了小型客车行驶时车辆的平顺性。
空气悬架;参数自调整模糊控制;电子控制单元;加速度传感器
0 引 言
车辆行驶的平顺性、操作稳定性在很大程度上受悬架的影响,而人们对车辆乘坐舒适性及安全性的要求越来越高。传统的被动悬架由于不能自动调节其参数,使其适应载荷、车速或路况等不可测因素的变化难以满足人们要求。空气悬架是以空气弹簧为弹性元件,具有随气囊压力形状变化而其刚度随之变化的特点,可以把空气弹簧设计成具有理想特性的形式。此外,空气弹簧由于具有非线性的特性使其在设计时可以得到理想形状的特性曲线。空气弹簧还具有对高频振动的吸收、隔振的能力以及良好的通用性和耐久性[1]。
文中以小型客车的1/4车辆动力学模型为基础,提出了参数自调整模糊控制的控制策略,克服了常规的模糊控制器的核心模糊规则要依靠
专家经验而定,若被控对象参数发生变化或受到较强随机干扰时,都将对控制效果起到影响。文中设计了一套在空气悬架的电控装置,用来对气囊进行充放气控制,实时调整车辆悬架的刚度,使汽车能最大限度地适应不同的运行工况,从而更好地提高汽车行驶平顺性和操纵稳定性,满足现代汽车高性能与高舒适度的要求。
1 空气弹簧充放气特性及模型
1.1 空气弹簧的弹性调节
根据空气弹簧的非线性刚度特性原理知:理论计算时,空气弹簧刚度可以直接由载荷F对位移s求导得到,然后经过换算得到刚度特性的一般关系式:

式中:Pi空气弹簧内部气体表压力,也称为内部气体有效压力或相对压力;

由式(1)可知,空气弹簧设计在尺寸固定时,可以通过以下方法调节空气弹簧刚度:改变空气弹簧气囊中气体的压力、改变气囊中气体与气囊接触的有效面积或改变空气弹簧气囊的容积。综合实际情况以及经验,文中调节空气弹簧刚度的方法是改变气囊内的气压[2]。
本系统以电子控制单元发出的信号作为控制信号控制电磁阀的通断,实现通过对空气弹簧的充、放气改变其内部的气压进行刚度调节。一般来说,可以通过对空气弹簧充放气实验得出大量数据,然后进行曲线拟合,最后确定空气弹簧的充、放气特性的一般方程:

式中:Ks——空气弹簧的刚度;
t——充、放气的时间;
α,β,γ——分别是常数。
1.2 空气悬架模型
为了更准确并且更直观地研究车辆的主动悬架,文中采用了两自由度1/4车辆模型为研究对象[3],如图1所示。
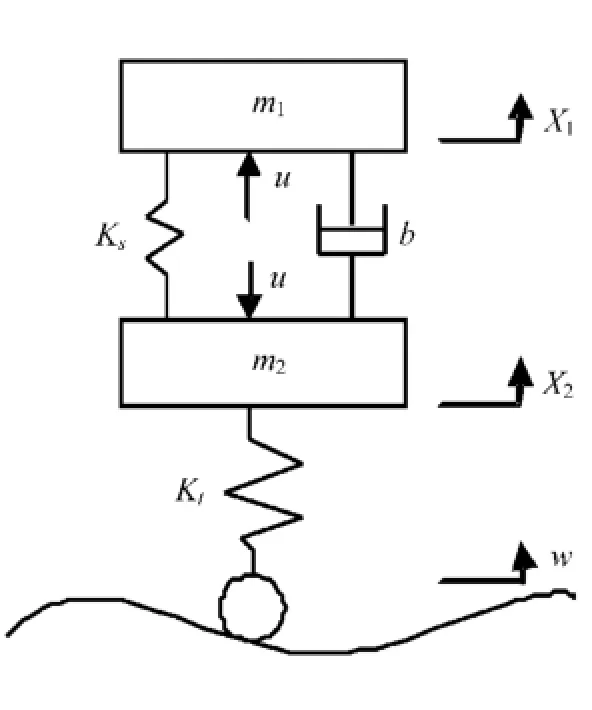
图1 悬架两自由度1/4模型
虽然它没有把车辆的各个方面信息完全体现出来,但它包含了实际中的主要特征,在此,四分之一悬架模型中用线性弹簧代替车辆模型中的弹性轮胎,并且忽略了轮胎的阻尼。根据此模型得出其运动学微分方程式如下:

式中:Kt——轮胎刚度系数;
Ks——悬架刚度系数;
b——减震器阻尼系数;
m1——非簧载质量;
m2——簧载质量;
w——路面输入;
X1——非簧载质量位移;
X2——簧载质量位移。
2 参数自调整模糊控制策略
等同于比例微分控制结构,以及对于结构参数和行驶工况经常发生变化的车辆而言,其精度不能保证的问题,对常规的模糊控制器进行了如下改进[4-5]:
1)加入一个积分环节,用于消除控制系统静差,减小超调量,提高控制精度;
2)对模糊控制器的量化因子ke,kec和比例因子ku,根据偏差和偏差变化率的大小进行分段自调整,结构如图2所示。
文中针对常规模糊控制器在控制结构上缺少

图2 参数自调整模糊控制系统框图
首先,对常规的模糊控制器进行设计,具体步骤为:确定模糊控制器的结构;建立模糊规则;确定模糊变量的赋值表,即对模糊语言变量确立隶属函数;建立模糊控制表;去模糊化。针对前面所建模型,文中选取簧上质量垂直方向的加速度均方根值与给定值的偏差和偏差的变化率作为控制器的输入变量e,ec,空气弹簧的充、放气时间为控制量u,进行模糊化处理变成模糊量,其对应的模糊语言变量E,EC,U;根据分析,文中选用了二维模糊控制器,对于模糊控制器输入变量e,ec,控制量u,其模糊子集进行如下划分:
E={NB,NS,Z,PS,PM,PB,PG}
EC={NB,NS,Z,PS,PB}
U={NB,NS,Z,PS,PB}
其中:PG(正极大)、PB(正大)、PM(正中)、PS(正小)、(Z)零、NS(负小)、(NB)负大。依据实际控制对象,根据经验确定模糊控制表,见表1。

表1 模糊规则表
最后,文中采用重心法对模糊控制器的输出模糊集合解模糊化。
在常规模糊控制器设计完成后,对量化因子ke,kec和比例因子ku这3个对系统影响很大的参数自调整进行设计。在基于以上理论分析和大量仿真研究,得出调整量化因子和比例因子的一般原则:
1)“粗调”阶段。控制过程的开始阶段,此时,偏差e和偏差变化率ec较大时,ke和kec取较小值用以降低对输入量e和ec的分辨率。与此同时,ku取较大值,增大控制量的变化,加快系统的响应速度,保证系统有较快的响应,又改善系统的动态性能。
2)“细调”阶段。系统已接近稳态阶段,偏差e和偏差变化率ec较小时,ke和kec取较大值以提高对输入量e和ec的分辨率,与此同时,ku的值减少,以减小控制量的变化,避免系统产生过大的超调,使系统尽快达到稳态范围。
本设计根据e,ec的绝对值、比例因子ku和积分器放大倍数的值ki的不同,采用以下控制策略完成上述控制过程,实现系统在仿真实现过程中的参数分段自调整[6]。具体取值范围见表2。
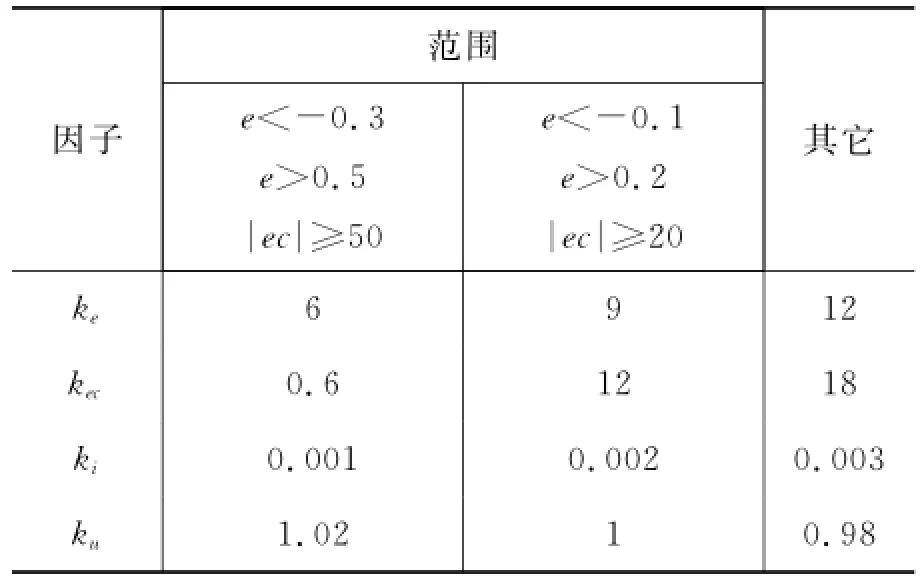
表2 各因子取值范围
3 汽车悬架电控系统设计
3.1 系统整体设计方案
文中设计的空气悬架的电控系统是以Mega16为微处理器,通过压电式加速度传感器采集加速度信号,然后经采集电路将采样信号输入到ECU中,经过指定的算法处理后,得出使悬架性能最佳的控制信号,驱动电磁阀工作,调节气缸进行对空气气囊的充气、放气,最终达到调节空气弹簧弹性系数的作用,具体结构如图3所示。

图3 空气悬架电控系统结构框图
在执行器工作过程中,当系统需要增大空气弹簧的弹性系数时需要对空气气囊充气,打开充气电磁阀,压缩机开始工作将空气充入空气悬架的主气室,让气囊内的空气增加,达到让空气弹簧弹性系数变高或悬架系统变高的作用。当系统需要弹性系数变小时,气缸停止工作,放气电磁阀被系统驱动电路打开,空气气囊开始放气,排出气体通过电磁阀、排气管路、干燥等处理装置、排气阀排除[7]。
3.2 信号采集系统
针对车辆震动的特点,文中使用压电式加速度传感器对车身加速度信号进行采集[8]。压电加速度传感器是一种典型的自发式传感器,它是以某些晶体受力后在其表面产生电荷的压电效应为转换原理的传感器,具有灵敏度高、信噪比高、结构简单、重量轻、工作可靠等优点,在加速度测量方面得到了广泛的应用。压电式传感器以石英晶体的压电效应为基础,在外力的作用下,石英晶体表面产生电荷,从而实现非电量电测的目的,测量加速度。本设计使用的压电式传感器的灵敏度为35pC/g,测量范围-100~+100g,频率范围为0.2~8 000Hz,质量为19g,安装螺栓为M5。因为当加速度传感器检测到震动时后输出的电荷信号,而控制器不能识别电荷信号,所以要经过处理电路转换成电压信号,转换电路如图4所示。
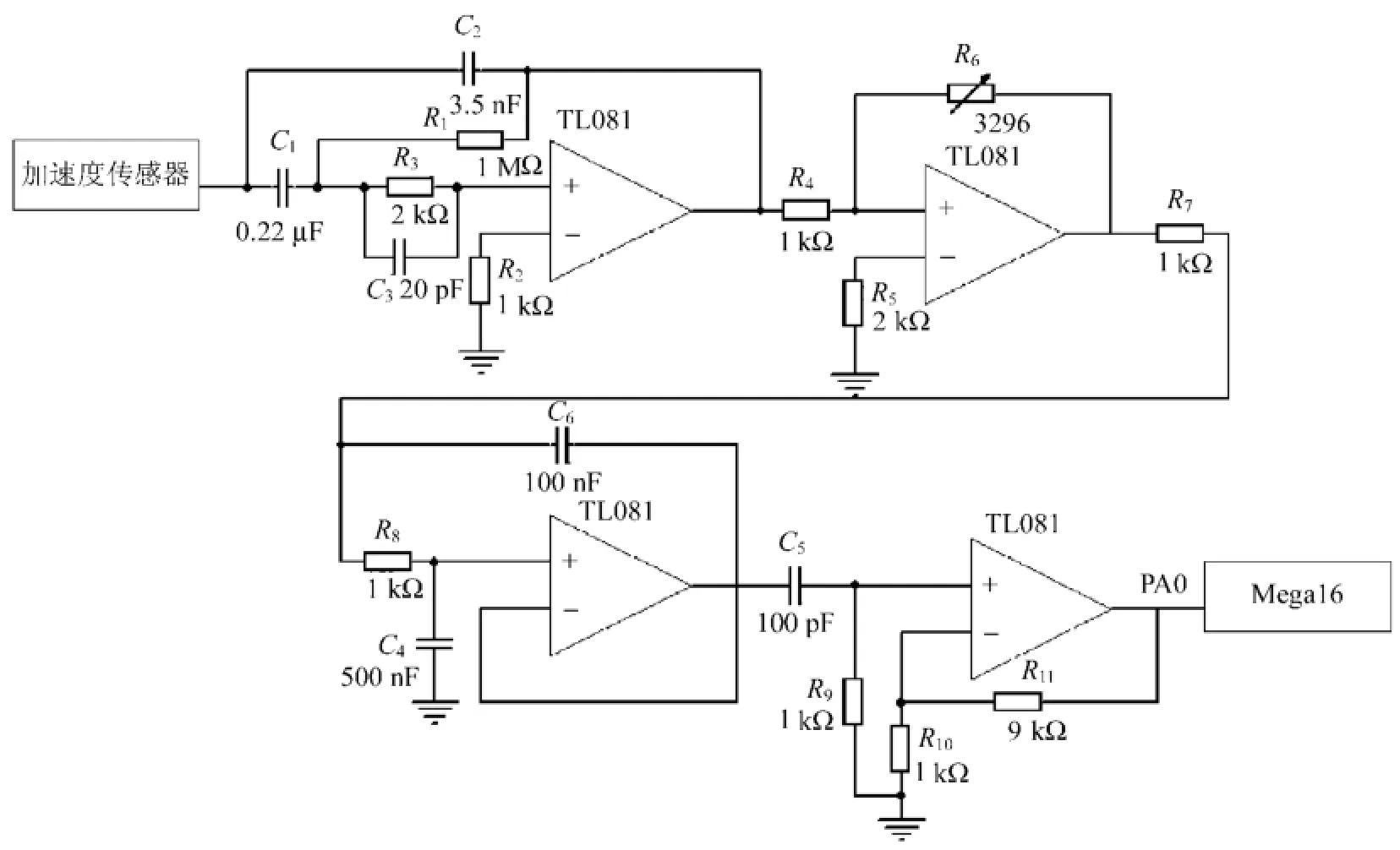
图4 加速度传感器检测电路
信号检测电路主要分为电荷转换、适调放大、低通滤波、输出放大4个部分。电荷转换部分是将加速度传感器的输出电荷信号Q转换成电压信号V,由运算放大器和反馈网络组成。根据电压传感器输出信号的特点,本设计采用的运算放大器是TI公司的TL081芯片。适调放大电路的主要功能是为了适应不同的加速度传感器,使输入加速度一定时,不同精度的传感器有相同的输出。低通滤波电路主要是滤除系统中有震动产生的高频噪声。在最后的输出放大部分是由一个能够去除电路中直流分量的高频滤波电路和改变整个系统增益的同相放大电路。
3.3 控制型号驱动电路
ECU采用PWM方式输出控制信号控制电磁阀的通断,ECU采集信号并经过计算后调节输出信号脉宽的长度,如系统需要快速增大空气弹簧的弹性系数时,ECU输出长脉冲,这样电磁阀处于相对比较长的通路状态,气缸向气囊迅速充气,这样就增大了空气弹簧的弹性系数[8]。本系统选用的是NUD3124(汽车板)继电器驱动芯片。固态继电器控制电压5V,开关频率不低于50Hz;电磁阀选用的是SRS2-80,驱动电压为直流24V,开关频率为0~12Hz。
3.4 系统软件设计
本系统的主程序流程图如图5所示。
程序采用C语言编写。加速度的信号采集采用中断方式,在系统初始化后微处理器开始捕捉加速度信号,如果信号没有捕捉完成,则系统继续采集,当加速度信号采集完成后被输入微处理器后进行处理,接着根据计算出的e,|ec|的值调整ke,kec,ki,ku4个参数,进行模糊控制后,根据需要改变的刚度确定对空气悬架充放气时间,当调整完的空气悬架刚度在预设范围内,则系统输出控制信号改变空气弹簧充放气时间,进而调整空气悬架系统刚度,否则系统直接结束,并等待下一次中断。
4 模拟实验及分析
文中对空气悬架系统进行了两自由度1/4车辆的台架试验。实验器材有数控液压伺服振动测试系统、电控悬架系统、Wave-book信号采集器、pc机等。对比分析参数自调整模糊控制的电控空气悬架和被动空气悬架在相同路面上不同车速的激励下得到的数据[9-10]。被控对象的具体参数为m1=190kg,m2=1 800kg,b=1 444N·m·s-1,Kt=923 500N·m-1,Ks=136 000N·m-1,实验模拟在B级路面上车速分别为10m/s,20m/s时,路面对车辆悬架模型的激励,采样间隔为0.05s,试验时间10s,实验结果如图6和图7所示。

图5 空气悬架电控系统软件流程图
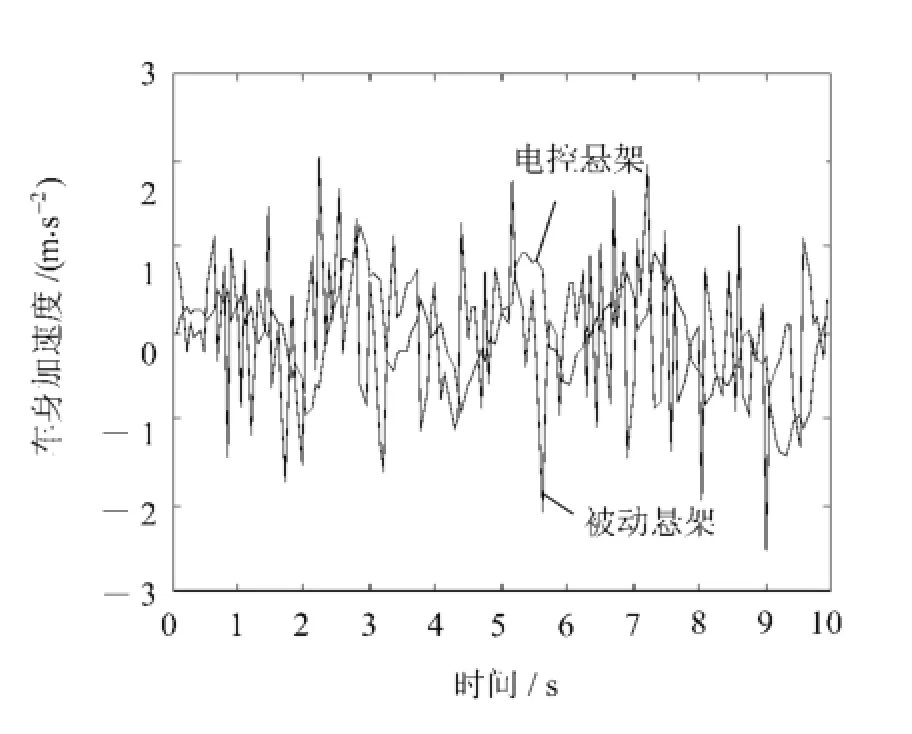
图6 B级路面10m/s时车身垂直加速度响应
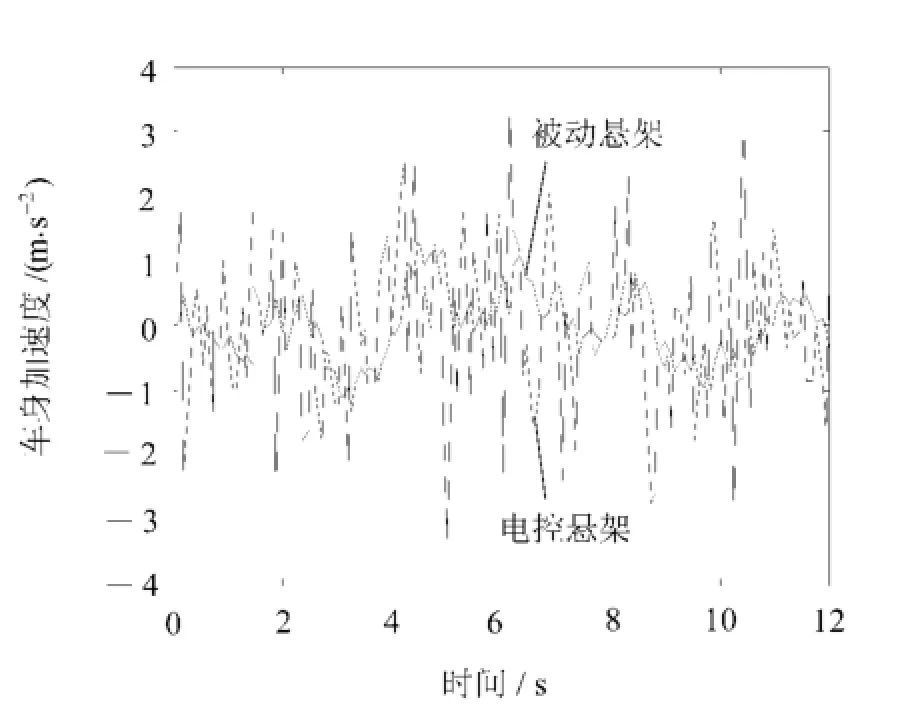
图7 B级路面20m/s时车身垂直加速度响应
从图中可以看出,参数自调整模糊控制的电控空气悬架的车身垂直加速度值有明显降低。
在B级路面的情况下,不同车速激励下的悬架性能对比见表3。
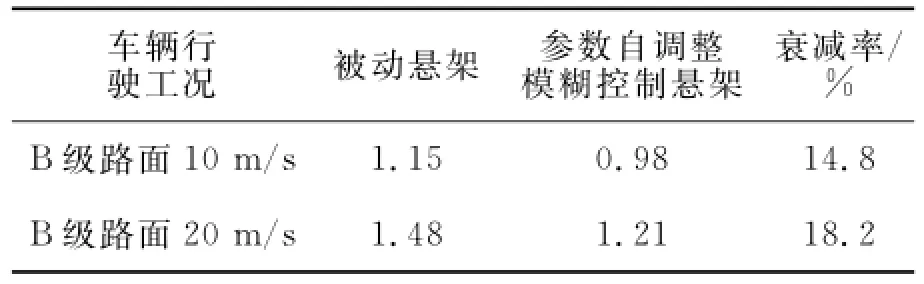
表3 车辆行驶工况变化时车身振动加速度的均方根值对比数据
由表中可以看出,参数自调整模糊控制空气悬架的性能优于被动悬架,当车速为10m/s,20m/s时,它的车身垂直方向振动加速度均方根值分别降低了14.8%,18.2%。可以发现,该电控悬架系统使车辆的加速度得到了一个较好的控制,使车辆操作稳定性和行驶平顺性也得到了明显的改善。
5 结 语
基于对车辆空气弹簧刚度的控制能有效地降低车身垂直加速度,从而提高汽车的行驶平顺性,
文中针对小型客车,设计了基于Mega16的空气悬架电控系统,并且设计的加速度检测电路能够很好地采集并处理加速度信号,为提高电子控制单元的性能,采用参数自调整模糊控制策略不断检测模糊控制器的输入变量,在线调整控制系统参数,实时改变控制策略,提高空气悬架系统对环境变化的适应能力,满足了系统时变性的要求。实验结果表明,与被动悬架相比,车身垂直加速度均方根有明显减小,说明参数自调整模糊控制电控空气悬架系统有效地提高了车辆行驶的平顺性。
[1]徐贵清.汽车悬架研究现状及发展趋势[J].中国高新技术企业,2010,22:35-36.
[2]杨启耀.ECAS客车悬架系统的匹配与充放气研究[D]:[硕士学位论文].苏州:苏州大学,2008.
[3]刘白燕.机电系统动态仿真:基于MATLAB/Simulink[M].北京:机械工业出版社,2005:159-162.
[4]刘宏伟,陈燕虹,田华,等.基于参数自调整模糊控制方法的半主动空气悬架仿真分析[J].设计·计算·研究,2005,12:19-23.
[5]杨晓燕.一种基于Matlab的参数自调整模糊控制器的设计方法[J].自动化博览,2009,12:76-79.
[6]李楠.车辆半主动空气悬架智能控制系统的研究[D]:[硕士学位论文].长春:长春工业大学,2007.
[7]杨林,陈思忠,吴志成,等.大客车空气悬架电子高度控制系统设计[J].北京汽车,2007(2):4-7.
[8]杨明丽.基于单片机的压电加速度传感器低频信号采集系统的设计[D]:[硕士学位论文].合肥:安徽大学,2007.
[9]全力,谢平,白露.基于飞思卡尔HCS08的汽车ECAS设计[J].汽车电子,2009,25(7/2):215-217.
[10]王炳,陈照章,徐兴.基于MC9S08GB60的汽车电控悬架控制系统设计[J].传感器与微系统,2008,2(12):70-72.
Parameter self-tuning Fuzzy control for an air suspension electrical control system
YU Wei-bo, DU Zun-sheng, YANG Ting-ting
(School of Electrical &Electronic Engineering,Changchun University of Technology,Changchun 130012,China)
With a car model as the object,aparameter self-adjusting fuzzy control strategy is put forward according to the spring characteristics of the air.We design an air suspension electrical control system and the simulation results show that the controller can effectively decrease the vertical acceleration and improve the overall performance.
air suspension;parameter self-adjusting fuzzy control;the electronic control unit;the acceleration sensor.
U463
A
1674-1374(2014)01-0090-06
2013-01-12
吉林省教育厅“十一五”科学技术研究项目(吉科教合字[2010]第98号)
于微波(1970-),女,汉族,山东海阳人,长春工业大学副教授,硕士,主要从事智能仪器与智能控制方向研究,E-mail:yu_weibo@126.com.
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
北京汽车(2016年6期)2016-10-13
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
汽车实用技术(2015年8期)2015-12-26
现代制造技术与装备(2015年4期)2015-12-23
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17
