
基于单片机的LAMOST光纤定位单元碰撞处理系统仿真
2014-05-13 01:25:10刘晓杰
天文研究与技术 2014年4期
刘晓杰,王 钢
(1.中国科学院光学天文重点实验室(国家天文台),北京 100012;2.中国科学院大学,北京 100049)
基于单片机的LAMOST光纤定位单元碰撞处理系统仿真
刘晓杰1,2,王 钢1
(1.中国科学院光学天文重点实验室(国家天文台),北京 100012;2.中国科学院大学,北京 100049)
由于超区工作,郭守敬望远镜(LAMOST)光纤定位单元,在定位过程中可能发生碰撞。为了安全运行提高效率,需要有一个硬件碰撞识别处理系统。提出了一种采用脉冲信号计数的方法。利用延时程序在单片机1的I/O口产生3种同频率不同相位的脉冲。将这3种脉冲分别加在相邻的3个光纤单元的光纤架上,由单片机2的计数器累计在设定的时间段内光纤架上的脉冲数,计数结果由单片机2处理,如果计数结果在未发生碰撞的理论值范围内,则电机继续沿原方向旋转,否则说明光纤定位单元发生碰撞,电机将按原方向的反向进行转动。对此进行了仿真实验。
单片机;LAMOST;光纤定位单元;AT89C51;脉冲计数
CN53-1189/P ISSN1672-7673
郭守敬望远镜(LAMOST)是我国正在运行的大视场和大口径的反射式施密特天文望远镜[1-2]。如图1,在直径为1.75 m的球冠形焦面板上呈蜂窝状分布着4 000个光纤定位单元[3],每个光纤单元由两个步进电机驱动。每根光纤的有效覆盖区域为Φ33 mm的圆,任意两个相邻圆面的中心距为25.6 mm,这样确保整个焦面无盲区。光纤定位单元[4]采用双回转的运动方式,由可运转360°的中心回转和180°的偏心回转组成。单元原理如图2。光纤定位单元没有编码器,光纤位置通过步进电机计步得到。每个回转有一个电零位。通过光纤回零消除光纤定位误差的累积。由于光纤超区工作(工作区域大于光纤定位单元间隔),当相邻的光纤定位单元同时运转到重叠区域时,就会发生碰撞,发生碰撞后如果不及时处理不但造成光纤定位单元系统的损坏还大大降低了望远镜的工作效率。目前,LAMOST采用软件计算的方法使光纤定位单元在一定的安全距离之外运行,避免光纤碰撞,这会降低光纤的利用率。当操作不当或计算错误时会导致软保护失效,这样光纤定位单元仍会发生碰撞。因此需要一个能实时处理光纤定位单元之间碰撞问题的碰撞处理系统,保证光纤定位的安全运行。
1 光纤单元碰撞问题的分析
处理碰撞问题,需要对碰撞加以识别。图3是光纤定位单元的工作区域的示意图。可以将光纤定位单元分成A,B,C 3种,并给它们加上不同的信号,当检测到非本单元的信号时表明碰撞发生了。中国科技大学曾就光纤单元碰撞问题提出过两种方案[5-6]:电位差方案中,给3种单元分别加上不同电压,当发生碰撞时,电压改变为两种单元电压的中值;波形对比方案中,给3种单元加上不同的调制信号,与参考信号对比。碰撞时2种或3种信号叠加,有别于参考信号。本文提出了脉冲计数的方案,给3种单元分别加上有一定相位差的同频率的脉冲信号。当碰撞发生时,在设定时间内所计的脉冲将增加至正常运转时的2到3倍。理想的碰撞处理系统应当能够在电机每走一步就可以检测碰撞问题。这样不会损伤光纤定位单元,甚至可以保持光纤定位单元的位置,不丢步。消除碰撞后可以直接定位。

图1 焦面板示意图Fig.1 Illustration of optical-fiber positioning units on the focal-plane plate

图2 光纤单元原理图Fig.2 A schematic diagram of an optical-fiber positioning unit of two-shaft rotation

图3 重叠区域示意图Fig.3 Illustration of regions of three types and their overlaps involved in observation
2 碰撞处理仿真系统基本方案
用于检测是否碰撞的3种脉冲信号由单片机1[7]产生,即单片机1的P0口3个I/O端口由内部延时程序产生同频率不同相位的脉冲,将这3种脉冲分别加在3组光纤定位单元的光纤架上。由单片机1的延时程序产生的脉冲占空比可调性强;脉冲周期可在1 μs到1 s之间由实验需要任意选取;并且应用光电隔离芯片,可将1片单片机产生的3种脉冲加在4 000个光纤定位单元的偏心回转轴上。单片机2作为驱动光纤定位单元步进电机的微控制器,设定500 μs的中断,由计数器计算在设定时间段内光纤单元偏心回转轴的光纤架上的脉冲个数。由单片机1发出的脉冲设定的周期是100 μs,碰撞未发生则脉冲个数等于计数时间段/脉冲周期,当发生碰撞,脉冲信号叠加,设定时间段内的脉冲数会有所增加。若是两个光纤定位单元发生碰撞,那么脉冲数应该是设定值的两倍,若是3个光纤碰撞到一起那么脉冲数应该是设定范围的3倍。
碰撞处理仿真系统的结构如图4,由单片机1产生脉冲信号加载于光纤架上,单片机2(A)、2(B)和2(C)用来驱动A,B,C 3类光纤单元的偏心回转轴上的步进电机,计数脉冲识别碰撞,处理碰撞问题。

图4 硬件系统框图Fig.4 The block diagram of the hardware system
3 仿真系统硬件组成
现代计算机的处理速度越来越快,需要处理的问题也越来越复杂,仿真在自动控制系统中的作用变得越来越重要,Proteus的ISIS是一款电路分析失误仿真系统[8],可仿真各种电路和IC。为了验证光纤定位单元碰撞处理系统实际电路的可行性,用Proteus对此处理系统进行仿真。
由单片机AT89C51作为处理器的碰撞处理系统利用Proteus绘制的电路原理图如图5。由电路图可知,该处理系统主要由两片单片机组成,单片机1用来产生周期为100 μs 3种不同相位的脉冲,单片机2用来在设定时间内采集单片机1产生的脉冲信息,控制偏心回转轴电机的启动和停止。除此以外,系统还设有LED数码管用来显示单片机2采集的脉冲数量。

图5 碰撞系统原理图Fig.5 The system diagram of the circuit for simulating optical-fiber collision
3.1 AT89C51单片机
AT89C51单片机是一种低电压、高性能CMOS 8位微处理器。AT89C51采用ATMEL高密度非易失存储器制造技术制造,与工业标准的MCS-51指令集和输出管脚相兼容。AT89C51是一种高效微控制器,能够将多功能8位中央处理器和闪烁存储组合在单个芯片中,也为很多嵌入式控制系统提供了一种灵活性高且廉价的方案。本文采用AT89C51主要是提供碰撞检测和处理以及驱动光纤定位单元电动机所需的脉冲。由于光纤定位单元的驱动电机频率是510 Hz,为了保证偏心回转轴的电机在每个转动周期内都能检测是否发生碰撞,所以将单片机2 T0的定时时间设置为500 μs,而单片机1产生的脉冲周期设为100 μs。
3.2 LED显示
显示器用一位LED十六进制的共阴极数码管,它显示单片机2的定时器T1在500 μs内计数器T0所计的脉冲数。因为设定的脉冲周期是100 μs,所以一位LED数码管就能显示所计脉冲的正确个数。由于LED是十六进制的,所以即使相邻光纤定位单元发生碰撞,叠加后的脉冲显示值也不会溢出。因为是一片单片机控制一个光纤定位单元的偏心回转轴,I/O端口有剩余,所以直接用单片机2的P0口驱动LED数码管的8个引脚。
4 软件系统
4.1 碰撞处理系统软件结构
由光纤定位单元的结构可知光纤被安装在偏心回转轴的顶端圆域内(如图2),碰撞只可能发生在偏心回转轴上,所以单片机2的主要任务是完成对加在偏心回转轴上脉冲信号的检测。根据反馈到单片机2的检测结果给偏心回转轴电机相应的指令,确保光纤运转单元处于正常运行的状态。单片机2的程序主要分为3部分:第1部分是单片机2计数器T0在定时器T1设定的时间内对单片机1产生的脉冲进行计数。第2部分是在定时器T1产生中断子程序中判断T0计数结果,如果计数结果在4~6个范围内则证明光纤定位单元没有发生碰撞,否则,说明光纤定位单元发生了碰撞;第3部分是设定一个碰撞标识符返回主函数,主函数用来驱动光纤定位单元的偏心回转轴电机,如果接到了光纤定位单元碰撞指令,则对偏心回转轴电机现行的运转方向取反。程序流程如图6。

图6 程序流程图Fig.6 The flowchart of the software
4.2 仿真过程
(1)在KEIL C51μVsion编译环境下设置断点、单步、跳步运行、复位等方式进行调试,生成.HEX文件。
(2)在Proteus中左键双击AT89C51弹出“Edit Component”窗口,并在“Program File”中添加生成的.HEX文件路径。
(3)单击原理图中的运行按钮,进行仿真,在工具栏中的Virtual Instruments Mode处添加OSCILOSCOPE示波器,观察各路脉冲。
5 仿真结果分析
5.1 仿真结果分析
如图7,示波器显示的3种脉冲分别由单片机1利用延时程序在P00、P01、P02 3个I/O口产生。从上到下第4个脉冲为接在单片机2T0口的计数脉冲。在仿真中将叠加后的脉冲信号接入单片机2中模拟相邻光纤定位单元碰撞现象,相邻的两个单元碰撞后仿真结果如图8(a),3个相邻单元碰撞后的仿真结果如图8(b)。叠加后的碰撞信号为图中第4列脉冲,从图中可看出叠加后的脉冲数是原来的两到三倍,当脉冲叠加时,步进电机转动方向取反。因为处理中断代码所用时间是25 μs,选用的51单片机的机器周期是1 μs,本套仿真系统可以对频率510 Hz的光纤单元步进电机进行每步检测。理论上能够对频率为1 MHz进行计数,可以对每一步进行检测的步进电机最高运转频率是40 KHz。
5.2 实验电路可行性分析
由于每个光纤定位单元碰撞处理系统之间是相互独立的,对于每一个光纤定位单元来说,发生碰撞与正常运转之间的差别只在于碰撞脉冲信号是否发生了叠加,所以只仿真了一个光纤单元。实际电路中光纤架上的碰撞信号叠加的原因:由于光纤架是金属的,当加入脉冲信号时,整个偏心回转轴上都有了电脉冲信号,当相邻光纤单元碰撞接触时,彼此的电脉冲信号就会叠加,相碰撞的2个或3个单元的光纤架的脉冲会发生变化。设想的实际碰撞系统方案如下:第一,由单片机1产生3种碰撞信号,经过光电隔离和驱动器进行驱动后,再连接到A,B,C 3类光纤单元的光纤架上,需要经过几级驱动,要在实际电路中加以确定;第二,每个光纤定位单元的碰撞处理系统是由一片单片机2用来控制偏心回转轴上的步进电机,单片机2从光纤定位单元实时收取脉冲信号的信息,当光纤定位单元没有发生碰撞时,在单片机2设定的500 μs的定时中断内所计的周期为100 μs的单片机1的脉冲数为5。整个硬件碰撞系统的搭建都在后台完成,光纤单元结构上只是多了一条加载到光纤架上的脉冲导线。每个单片机2的工作目标旨在读取它所控制的回转轴光纤架上的脉冲数,与其他光纤单元无关,任意的光纤单元电机控制器都是相互独立的。
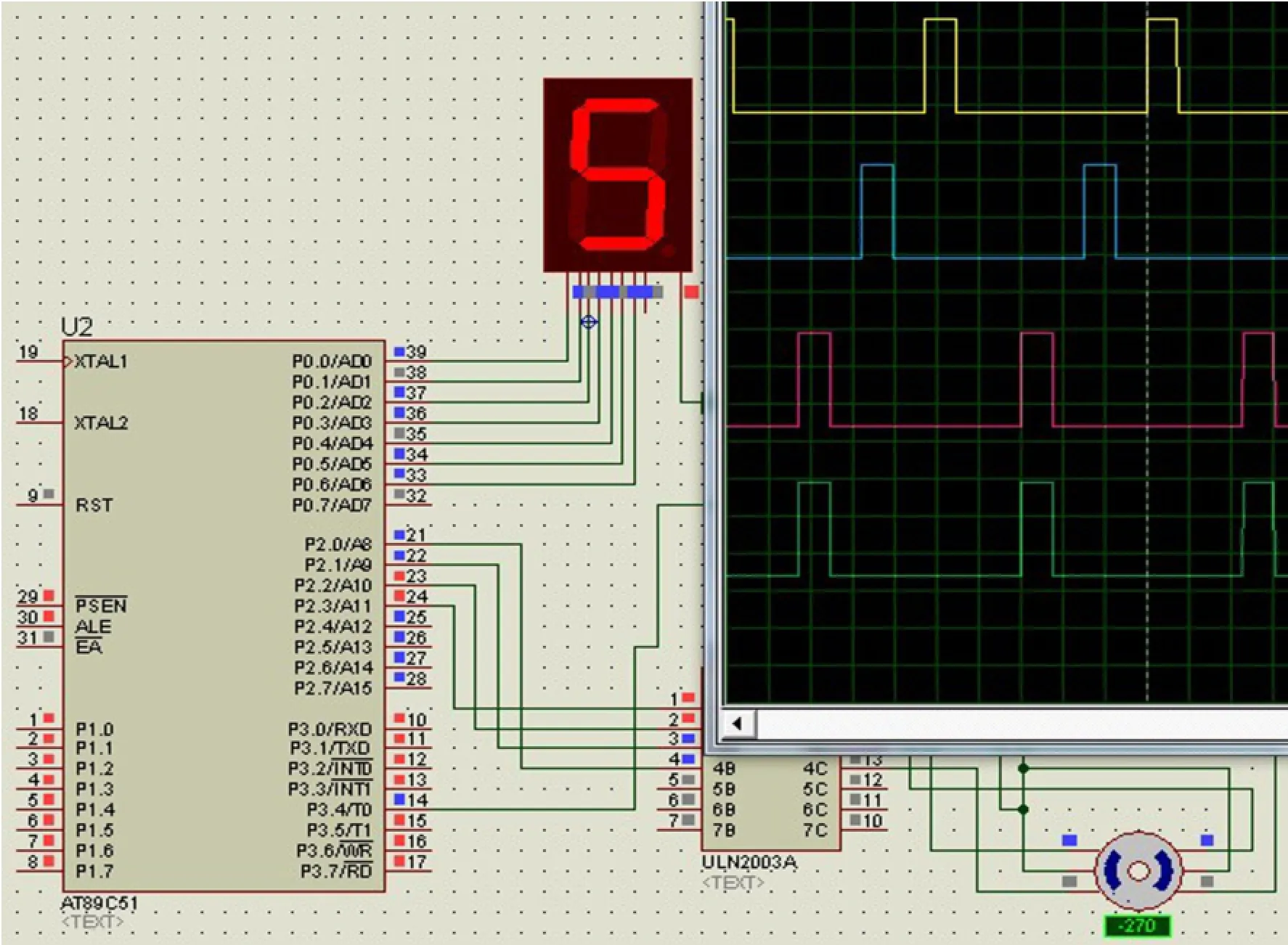
图7 偏心回转轴上的3种脉冲Fig.7 Simulated pulses of three patterns on the off-center shaft
6 结束语
因为在实际运行中步进电机的频率是510 Hz,为了能对电机的每一步都进行是否碰撞的检测,就要求处理程序在2 ms内完成。脉冲频率由于是延时程序产生,所以频率的变化范围可以从100 KHz到几百赫兹。考虑到芯片资源的合理利用和实验的可靠行,选择了每个中断时间5个脉冲的仿真实验。经过多次仿真实验表明,频率在100 μs左右的脉冲信号能够达到准确检测碰撞事件的要求。本文提出的这种基于Proteus仿真的单片机对步进电机运转控制的仿真方法,构建的仿真系统能处理光纤定位单元碰撞问题。单片机2根据光纤定位单元的状态发送预设的指令,可以对光纤定位单元的偏心回转轴电机进行停止、正反转处理。该碰撞处理系统可以在相邻的光纤定位单元间发生碰撞时令其向反方向转动,这样避免故障的进一步发生。通过KEIL C51uVsion3程序设计与Proteus硬件方针实现了所期望的控制过程。

图8 (a)碰撞前的系统图案;(b)碰撞后的系统图案Fig.8 Simulation results of optical-fiber collision.(a)Pulses before collision;(b)Pulses after collision
[1] Wang S G,Su D Q,Chu Y Q,et al.Special configuration of a very large Schmidt telescope for extensive astronomical spectroscopic observation[J].Applied Optics,1996,35(25):5155-5161.
[2] LAMOST工程指挥部.LAMOST可行性研究报告[R].北京:LAMOST工程指挥部,1997.
[3] 李为民,胡红专,俞巧云,等.LAMOST并行可控式光纤定位单元及其控制技术研究[J].国内科技,2000(4):33-34+38.
Li Weimin,Hu Hongzhuan,Yu Qiaoyun,et al.The research on the positioning unit and its control method of parallel controllable optical fiber positioning system for LAMOST[J]. Demestic Science and Technology,2000(4):33-34+38.
[4] 邢晓正,胡红专,杜华生,等.用于LAMOST的并行可控式光纤定位系统[J].中国科学技术大学学报,1997,27(4):492-493.
Xing Xiaozheng,Hu Hongzhuan,Du Huasheng,et al.A parallel controllable optical fiber positioning system for LAMOST[J].Journal of China University of Science and Technology,1997,27(4):492-493.
[5] 颜芳,翟超,舒钊,等.利用脉冲比对方法实现LAMOST光纤定位单元碰撞检测[J].仪器仪表学报,2008,29(8):1638-1642.
Yan Fang,Zhai Chao,Shu Zhao,et al.Collision avoidance device on fiber positioning units in LAMOST based on pulse comparison[J].Chinese Journal of Scientific Instrument,2008,29(8):1638-1642.
[6] 颜芳,翟超,舒钊,等.LAMOST光纤定位单元防碰撞系统[J].机械与电子,2007(8):3-6.
Yan Fang,Zhai Chao,Shu Zhao,et al.The collison avoidance device on the fiber positioning units of LAMOST[J].Machinery&Electronics,2007(8):3-6.
[7] 刘文淘.MCU-51单片机培训课程(C51版)[M].北京:电子工业出版社,2005:20-128.
[8] 潘万平,徐刚,张劲松.基于Proteus的步进电机闭环控制的仿真[J].煤矿机械,2010,31 (2):46-47+48.
Pan Wanping,Xu Gang,Zhang Jinsong.Proteus-based closed-loop control of stepper motor simulation[J].Coal Mine Machinery,2010,31(2):46-47+48.
Simulations of Collision between Optical-Fiber Positioning Units of the LAMOST Using Single-Chip Microprocessors
Liu Xiaojie1,2,Wang Gang1
(1.Key Laboratory of Optical Astronomy,National Astronomical Observatories,Chinese Academy of Sciences,Beijing 100012,China,2.University of Chinese Academy of Sciences,Beijing 100049,China,Email:liuxiaojie10@mails.ucas.ac.cn)
To avoid missing survey areas,the light-collection areas of focal-plane optical fibers of the LAMOST(Large sky Area Multi-Object Fiber Spectroscopic Telescope)are set to overlap.Collision between adjacent optical-fiber positioning units may thus occur during their adjustments and affect the instrumental work efficiency.We propose a system based on AT89C51 microprocessors to reverse instrumental state changes caused by collision.During positioning each optical fiber is driven by two stepping motors,which control its central shaft and off-center shaft,respectively.Pulses generated by a delay procedure run in one SCM(Single-Chip Microprocessor)of the system have three patterns which have the same frequency but different phases. Such pulses serve as signals for detecting collision.The counter in each SCM controlling an optical-fiber positioning unit accumulates counts of pulses during a step of the stepping motor.A collision between two units causes pulses to be double counted,which triggers the SCMs to stop the two units and drive them backward. This collision-processing system has succeeded in boosting the work efficiency of optical fibers and improving the LAMOST observation efficiencies.As reported in the paper,we have carried out simulations to test the feasibility of the system using a PROTEUS software package.
MCU;LAMOST;Optical-fiber positioning system;AT89C51;Pulse count
TN707;TH75
A
1672-7673(2014)04-0423-07
2013-11-24;
2014-01-16
刘晓杰,女,博士.研究方向:LAMOST碰撞处理系统设计.Email:liuxiaojie10@mails.ucas.ac.cn
王 钢,男,研究员.研究方向:天文仪器领域研究.Email:WG@lamost.org
猜你喜欢
上海大中型电机(2021年1期)2021-06-09 09:12:06
家庭影院技术(2020年1期)2020-06-24 05:59:20
山东冶金(2019年2期)2019-05-11 09:12:24
家庭影院技术(2019年4期)2019-04-17 05:12:56
家庭影院技术(2018年9期)2018-11-02 05:31:36
快乐语文(2018年7期)2018-05-25 02:32:15
电子制作(2017年13期)2017-12-15 09:00:11
电脑爱好者(2016年23期)2017-01-05 20:39:51
小说月刊(2015年9期)2015-04-23 08:48:23
人生十六七(2015年5期)2015-02-28 13:08:24
