
摆镜平台寿命试验
2014-05-13 01:25王景宇戴妍峰姜爱民
天文研究与技术 2014年4期
王景宇,戴妍峰,姜爱民
(1.中国科学院国家天文台,北京 100012;2.中国科学院太阳活动重点实验室(国家天文台),北京 100012)
摆镜平台寿命试验
王景宇1,2,戴妍峰1,2,姜爱民1,2
(1.中国科学院国家天文台,北京 100012;2.中国科学院太阳活动重点实验室(国家天文台),北京 100012)
摆镜平台是大口径空间天文望远镜图像稳定控制系统中的一个活动部件,为评估其寿命,设计和实现了摆镜平台寿命试验系统,并进行了摆镜平台寿命试验,得到了初步的试验结果。分析了摆镜平台所处的空间环境和工作条件,给出了摆镜平台驱动信号的产生方法和试验加速方法。在分析摆镜平台位移特性的基础上,给出了试验数据的处理方法和失效准则。初步试验的结果表明,摆镜平台在一年的时间里运行正常,在加速因子为5.5的情况下,等效摆镜平台已在卫星上正常工作五年半。
摆镜平台;寿命试验;位移测量
CN53-1189/P ISSN1672-7673
大口径空间天文望远镜为达到衍射极限成像,对焦平面上相机的稳定性有严格要求,一般来说,仅靠卫星平台姿态和轨道控制系统难以满足衍射极限成像的稳定条件,需要加入图像稳定控制系统,构成望远镜两级光轴指向系统。目前正在运行的美国SOHO和日本Hindoe空间太阳望远镜都配有图像稳定控制系统[1-2]。国家天文台已研制出图像稳定控制系统工程样机,并将用于空间天文望远镜。为满足空间天文望远镜的寿命要求,需要对运行在空间环境下的图像稳定控制系统的寿命进行评估。
图像稳定控制系统一般由探测单元、计算控制单元和校正单元组成,如图1。探测单元和计算控制单元为电子学系统,国内外已对空间电子学系统的可靠性和寿命进行了大量的研究和试验,掌握了空间电子系统的寿命规律,对其寿命评估已不存在问题。因此,图像稳定控制系统寿命评估主要是校正单元寿命评估。校正单元由平面镜和摆镜平台组成,其寿命主要取决于摆镜平台。国外对摆镜平台寿命的研究主要集中在摆镜平台中的组件促动器的寿命评估上[3-5],而对摆镜平台整体寿命研究得很少。为评估摆镜平台寿命,根据图像稳定控制系统的工作环境和工作条件,设计了摆镜平台寿命试验系统,并在此系统上进行了摆镜平台寿命试验,到目前为止试验已进行了近一年,取得了初步的试验结果。
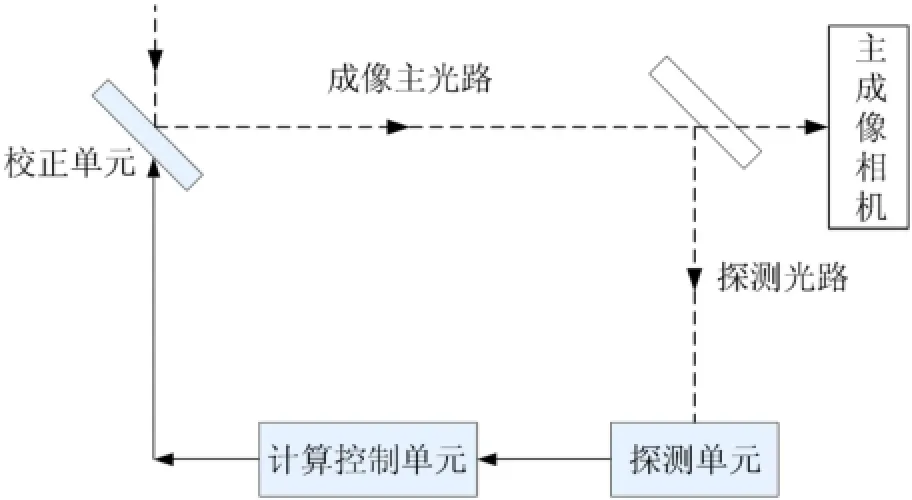
图1 图像稳定控制系统Fig.1 Illustration of the imaging-stability control system
1 摆镜平台寿命试验设计
1.1 寿命试验系统
图像稳定控制系统所用的摆镜平台为德国PI公司摆镜平台,由一对压电陶瓷促动器、台面、底座、外壳和驱动电缆线组成,如图2,通过驱动电缆线施加电压信号可以控制摆镜平台台面摆动。
由于摆镜平台成本较高价格昂贵,因此,在摆镜平台寿命试验中只用一个样品,采用定时截尾寿命试验方法进行试验,试验时间为两年。摆镜平台寿命试验系统由任意信号发生器、摆镜驱动器、电容式位移测量仪、双频激光干涉仪、控制计算机、温度湿度传感器和UPS电源组成,如图3。
摆镜平台寿命试验的关键是使摆镜平台的工作环境和工作状态尽可能地与卫星上的真实情况相同。摆镜平台所处的空间环境,主要包括真空、热、辐射、微流星体和空间碎片、原子氧等环境[6]。实验室可以模拟真空和热环境,但考虑到影响摆镜平台寿命的最大因素是湿度,以及摆镜平台在卫星上的工作环境温度在20℃左右,与实验室环境温度基本相同,摆镜平台中的PICMA (PI Ceramic co-fired multilayer actuators)促动器可以工作在10-9hPa的超高真空中,因此,可以不模拟真空和热环境。由于非真空中存在湿度会减少摆镜平台的寿命。因此,如果在非真空环境下摆镜平台能够达到寿命要求,那么在真空条件下也能达到这一寿命要求。
摆镜平台主要用来消除卫星平台抖动引起的成像模糊,只要模拟出卫星抖动信号,并用来驱动摆镜平台,就可以使摆镜平台工作过程接近于真实情况。
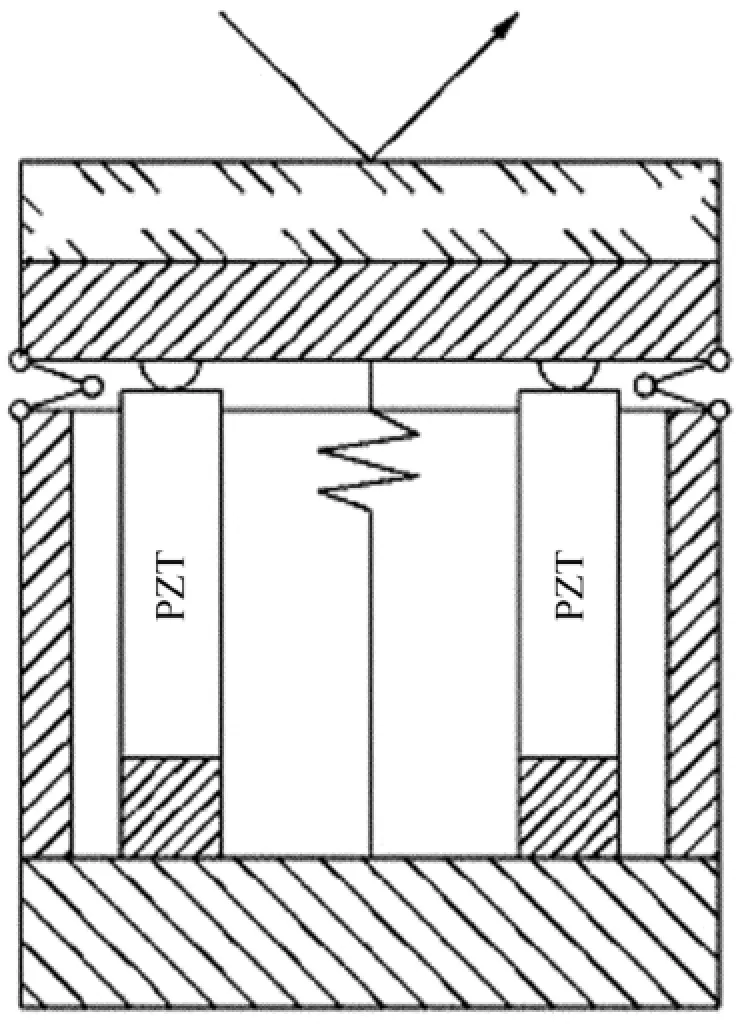
图2 S-340摆镜平台结构图Fig.2 A structure diagram of the S-340 tip-tilt platform
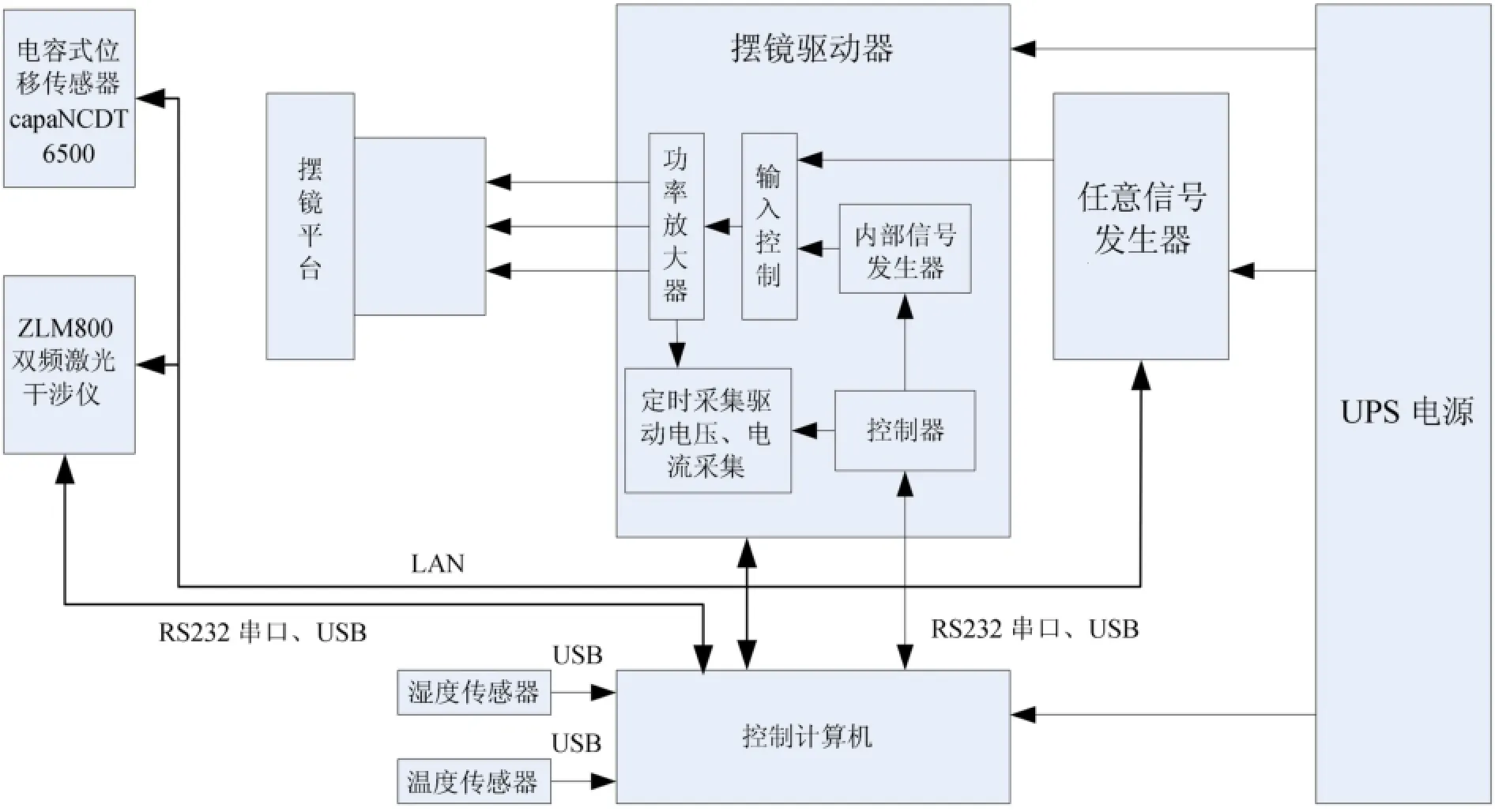
图3 摆镜平台寿命试验系统Fig.3 A block diagram of the system to test the lifetime of the tip-tilt platform
1.2 摆镜驱动信号的生成
图像稳定控制系统为一个伺服控制系统,采用启停式的断续工作模式。在图像稳定控制系统开环情况下,摆镜平台的驱动信号为常值电压,闭环情况下驱动信号为常值电压加随机噪声。随机噪声主要由卫星颤振功率谱密度决定。
由于目前无法准确给出图像稳定控制系统所在卫星平台的颤振功率谱密度,因此,采用欧洲航天局(ESA)的SILEX(Semiconductor Inter-satellite Laser Experiment)卫星平台振动功率谱密度模型,其解析表达式由(1)式给出。从欧洲航天局的OLYMPUS卫星实测功率谱密度曲线[7]和美国宇航局(NASA)的LANDSAT-4卫星实测功率谱密度曲线[8]可以看出,实测的功率谱密度曲线与SILEX模型曲线比较接近,因此,采用SILEX模型是合理的。

在已知随机噪声功率谱密度的情况下,可用白噪声通过线性系统的方法产生此随机信号,如图4。线性系统的传递函数的幅频响应和相频响应为:
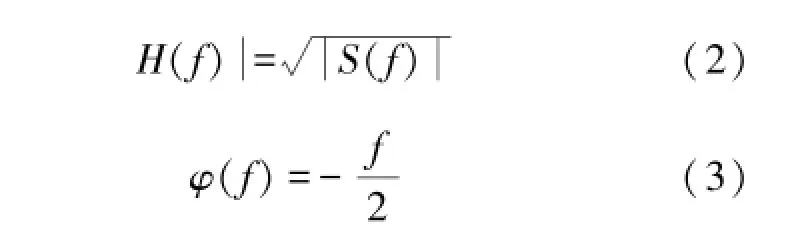
采用Matlab中的IIR数字滤波器实现上述线性系统,再用高斯白噪声通过该系统,输出为所要求的摆镜平台驱动信号,将输出存为数据文件。

图4 摆镜驱动信号产生方法Fig.4 Illustration of the method to generate drive signals for tip-tilt motions
根据空间天文望远镜成像的工作情况,设定成像积分时间为1 s,主成像相机图像读出时间为10 s,摆镜平台以工作1 s停止10 s的方式周期性运行,每个周期为11 s。为使试验加速进行,将摆镜平台的停止时间缩短为1 s,运行周期变为2 s,试验加速了11/2=5.5倍,如果两年的寿命试验结束时摆镜平台仍能正常工作,认为摆镜平台的寿命达到了11年。
为使摆镜平台驱动信号有更好的随机性,用Matlab生成一个200 s的随机噪声,然后用一个方波取样,得到一个断续间隔为1 s的随机噪声信号,将此信号制成数据文件。图5为生成的摆镜平台X轴和Y轴的驱动信号。将驱动信号数据文件输入信号发生器,并运行此文件,信号发生器输出的信号经过摆镜驱动器放大后驱动摆镜工作。
1.3 摆镜平台的监视和测量
对于摆镜平台通过采集驱动器输出的电压监视摆镜平台的工作状态,通过测量摆镜平台台面的位移或角度判断其是否正常工作。
采用capaNCDT6500电容式位移传感器测量摆镜平台位移,采用ZLM800双频激光干涉仪测量摆镜平台摆角。控制计算机定时采集摆镜平台位移测量数据。
1.4 摆镜平台测量数据的处理方法和失效判据
摆镜平台采用的是压电陶瓷促动器,存在磁滞效应和蠕动效应,使得驱动电压与摆镜平台位移或摆角成非线性关系,而且这种关系无法用解析式表达,采用比较摆镜驱动电压信号和测量所得位移或角度信号的方法判断摆镜平台是否正常工作存在一定的问题。对测量数据进行适当的处理可消除磁滞效应和蠕动效应对数据比较的影响,避免上述问题。因此,试验采用实际测量数据间相对比较的方法判断摆镜平台是否正常工作,具体过程如下所述。
摆镜驱动信号是一个周期为200 s的信号,控制计算机每6 h采集一次位移传感器的测量数据,每次采集的数据长度大于200 s,包含一个完整的周期,通过比较不同时间段采集的长度为一个周期的数据是否相同判定摆镜平台是否正常工作。对于周期信号中两个长度为一个周期的信号段,如果它们的相位相同,则两者之差为零,否则不为零。寿命试验在不同时间采集的200 s数据存在相位差,为了便于比较,在进行数据处理时,先从采集的数据中提取一个200 s的数据,然后再进行循环移位,使得它的相位与第1次采集的200 s数据的相位相同,循环移位量是通过计算两组数据循环互相关函数最大值的位置得到的。
摆镜平台没有通用的失效准则,摆镜平台内也没有集成可测量PICMA位移和压电性能的传感器,因此,无法通过测量摆镜平台压电性能物理量判断平台是否失效。目前是通过观察每次采集数据的波形曲线,以及与第1次采集数据间差值方差曲线的变化范围,设定一个阈值进行判别的。

图5 摆镜平台X轴和Y轴的驱动信号Fig.5 The drive signals for the motions of the X and Y axes of the tip-tilt platform
设Sk(n)为控制计算机第k次采集的数据,其中k=1,2,…;n=0,1,…,N-1;N=200/ΔT,ΔT为位移传感器测量数据采样间隔,n≥N时,Sk(n)=0,判断摆镜工作是否正常的数据处理算法如下:
对k≥2的Sk(n)
(1)计算S1(n)与Sk(n)的互相关函数:

(2)计算互相关函数RS1Sk(m)的最大值:

(3)计算S1(n)与Sk(n+m0)的差,并拟合为一条直线dfit(t)

(4)计算

(5)计算dk(n)的均值和方差:

(6)若k≥3,如果σk<2σ2,认为摆镜平台工作正常,若σk≥2σ2,则摆镜平台失效。
2 寿命试验初步结果和讨论
摆镜平台寿命试验系统从2013年1月1日开始正式运行,在摆镜驱动信号的作用下摆镜平台连续不断地摆动,计算控制计算机控制capaNCDT6500位移传感器和温湿度传感器每6 h采集一次位移数据和试验环境的温度和湿度,试验已进行了1年,采集的试验数据如图6。
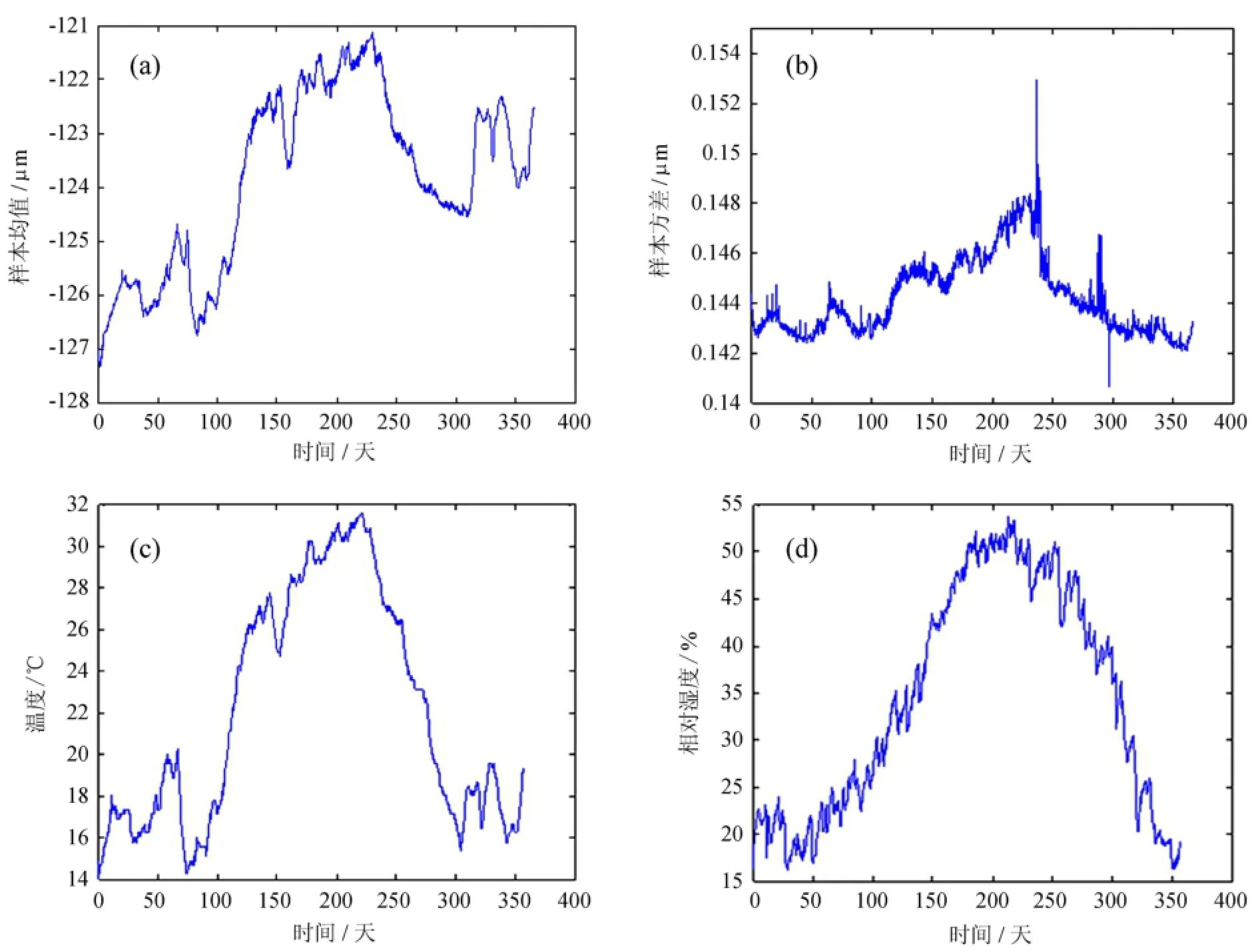
图6 试验数据曲线。(a)样本均值;(b)样本方差;(c)试验环境温度;(d)试验环境湿度Fig.6 Data collected in the test of the lifetime.(a)The mean displacements(of the platform plate)sampled on different days. (b)The rms displacements(of the platform plate)sampled on different days.(c)The environment temperatures of the platform measured on different days.(d)The environment humidity values of the platform measured on different days
样本均值和方差为每次采集200 s位移信号的平均值和方差,图6(a)和(b)给出了样本均值和方差与采集时间的关系曲线。与采集的温度与湿度曲线相比较,可以看出样本均值曲线与温度曲线有很好的对应关系,温度变化对样本的均值和方差影响加大,主要原因是摆镜放大器受温度的影响较大,输出信号随温度漂移,导致摆镜平台的位移随温度漂移。此外,测量位移的电容传感器对振动非常敏感,整个试验装置放在一个光学平台上,没有隔振装置,试验期间在光学平台下方的实验室正在进行改造施工,可能在数据自动采集期间刚好存在振动,产生较强的位移干扰信号,使得200 s位移信号的方差较大,图6(b)和图7(b)中的几个跳变值属于这种情况。
按照1.4中的数据比较算法计算所得结果如图7。从图7(a)可看出样本与初始样本差的均值在10-13μm的量级内,非常小,说明摆镜平台位移性能没有显著变化。
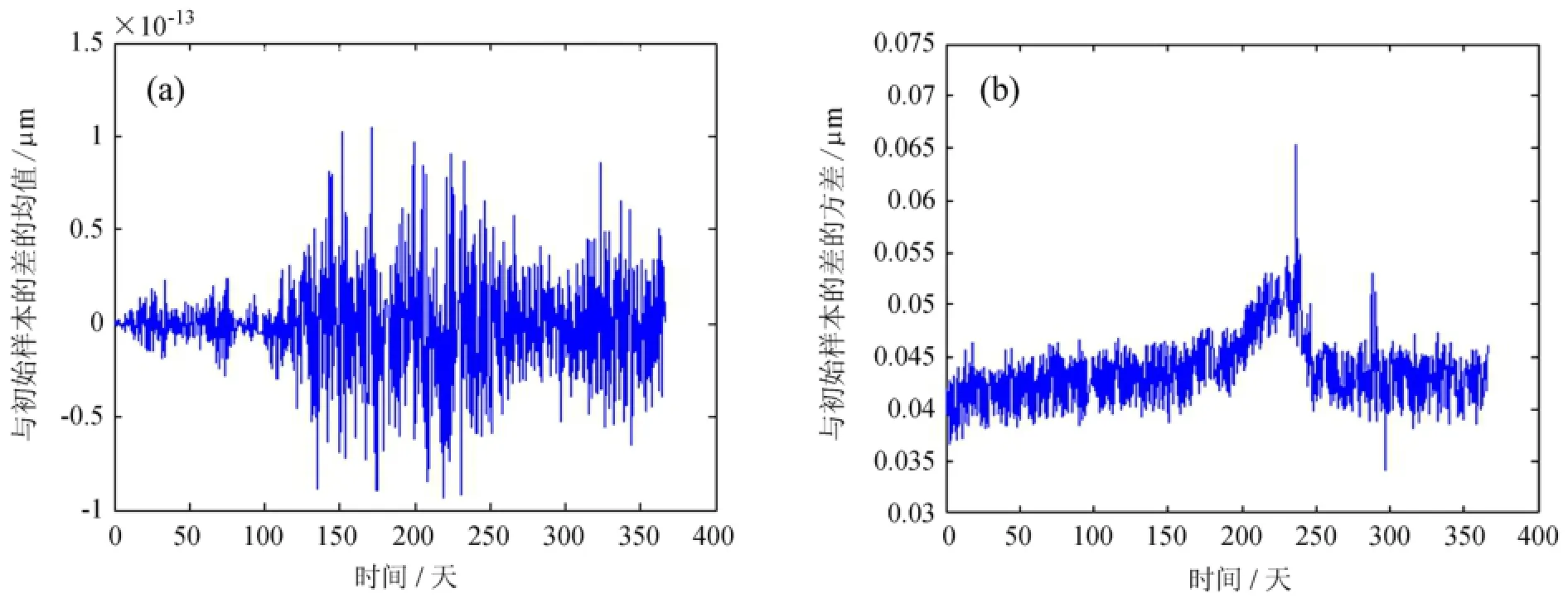
图7 位移测量数据间的比较结果。(a)样本均值与初始均值差的均值;(b)样本均值与初始均值差的方差Fig.7 Comparison between measured displacement data.(a)The mean displacement drifts(of the platform plate)sampled on different days.(b)The rms displacement drifts(of the platform plate)sampled on different days.A displacement drift is the deviation of a sampled displacement from the initially sampled mean displacement
利用(9)式计算得σ2=0.042 μm,σk的最大值为0.066 μm,小于2σ2=0.082 μm,因此,按照规定的判据摆镜平台工作正常。
3 结 论
通过对摆镜平台近一年的寿命试验数据的处理与分析,根据摆镜平台失效判定准则,摆镜平台一直处于正常工作状态,按照试验所设定的加速模式,摆镜平台已等效正常工作近5.5年。根据目前得到的试验结果可以看出温度对位移测量影响较大,在后续试验中考虑通过开启实验室内空调将温度控制在20℃左右,以消除温度对寿命试验的影响。
[1] Scherrer P H,Bogart R S,Bush R I,et al.The Solar Oscillations Investigation-Michelson Doppler Imager[J].Solar Physics,1995,162(1-2):129-188.
[2] Shimizu T,Nagata S,Tsuneta S,et al.Image stabilization system forHinode(Solar-B)Solar Optical Telescope[J].Solar Physics,2008,249(2):221-232.
[3] Sherrit S,Bao X Q,Jones C M,et al.Piezoelectric multilayer actuator life test[J].IEEE Transactions on Ultrasonics,Ferroelectrics,and Frequency Control,2011,58(4):820-828.
[4] van den Ende D A,Bos B,Groen W A,et al.Liftime of piezoceramic multilayer actuators: Interplay of material properties and actuator design[J].Journal of Electroceramics,2009,22 (1-3):163-170.
[5] Pertsch P,Richter S,Kopsch D,et al.Reliability of piezoelectric multilayer actuators[EB/OL].[2013-12-17].http://www.pi-usa.us/technotes/PICeramic_Paper_Piezoeletric_Reliability_ACTUATOR2006_m.pdf.
[6] 褚桂柏,马世俊.宇航技术概论[M].北京:航空工业出版社,2002.
[7] Wittig M,van Holtz L,Tunbridge D E L,et al.In-orbit measurements of microaccelerations of
ESA’s communication satellite Olympus[C]//Proceedings of the SPIE:Free-space laser communication technologies II.1990:205-214.
[8] 罗彤,李贤,胡渝.星间光通信中振动抑制的研究[J].宇航学报,2002,23(3):77-80+88.
Luo Tong,Li Xian,Hu Yu.Vibration suppression in optical inter-satellite communications[J]. Journal of Astronautics,2002,23(3):77-80+88.
A Test of the Lifetime of a Tip-tilt Platform
Wang Jingyu1,2,Dai Yanfeng1,2,Jiang Aimin1,2
(1.National Astronomical Observatories,Chinese Academy of Sciences,Beijing 100012,China,Email:wangjingyu@bao.ac.cn;2.Key Laboratory of Solar Activities,National Astronomical Observatories,Chinese Academy of Sciences,Beijing 100012,China)
An imaging-stability control system is a key subsystem of a large-aperture space telescope.The system comprises a monitoring camera,a computation/control unit,and a correction unit.Both the monitoring camera and the computation/control unit are electronic systems.The correction unit comprises a mirror and a tip-tilt platform,which is the only moveable component in the system.The lifetime of the tip-tilt platform appreciably influences the lifetime of the entire system.We have designed and built a system to test the lifetime of a tip-tilt platform.The lifetime-test system consists of a tip-tilt platform,a platform-motion driver,a waveform generator(with output waveforms arbitrary),a capacitive non-contact displacement sensor,a dualfrequency laser interferometer,and a control computer.Based on our analysis of the space environments and operation conditions for the tip-tilt platform,we have designed signals to drive the tip-tilt platform.These signals are periodic and are random within its period of 200s.To make the test of the lifetime accomplishable in a reasonable time,we have intentionally shortened the motion period of the tip-tilt platform by 5.5 times. Because there are hysteretic and creeping effects in the tip-tilt platform the relationship between the platform displacement and the drive-signal voltage is nonlinear.We propose a method of evaluating cross correlations between data sampled at different moments to nearly eliminate the influence of the nonlinearity in the statistical analysis of the data in the test.We use the method to compare displacements driven by the signals in different time periods to judge whether the platform works properly,with the criterion of failure of the platform being that the standard deviations of measured displacements exceed a large value.We present preliminary results of the ongoing test of the platform lifetime.The results show that the platform has been working without failure for one year.Taking into account the shortening factor of 5.5 of the motion period,we expect the results to be equivalent to proper running of the tip-tilt platform on a satellite for 5.5 years.We find that environment temperatures appreciably affect platform displacements.We plan to include temperature control in follow-up tests.
Tip-tilt platform;Test of the lifetime;Displacement measurement
TP273
A
1672-7673(2014)04-0410-07
2014-01-09;
2014-02-12
王景宇,男,研究员.研究方向:天文仪器与方法.Email:wangjingyu@bao.ac.cn
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
中老年保健(2021年8期)2021-12-02
房地产导刊(2020年11期)2020-12-28
作文评点报·低幼版(2020年3期)2020-02-12
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
铁道通信信号(2019年4期)2019-10-10
中学生数理化·八年级物理人教版(2019年3期)2019-04-25
华人时刊(2018年17期)2018-12-07
中学生数理化·八年级物理人教版(2018年3期)2018-05-31
奥秘(2017年12期)2017-07-04
