
基于硬件锁存技术的卫星控制系统高精度时统设计
2014-05-06 12:31王跃,战毅,陈超
空间控制技术与应用 2014年6期
王 跃,战 毅,陈 超
(1.中国空间技术研究院,北京100094;2.北京控制工程研究所,北京100190)
0 引言
卫星控制系统主要完成卫星姿态及轨道控制任务,但对于测绘卫星而言,控制分系统除完成常规控制任务外,还需要配合有效载荷提供带有时标的姿态测量数据.随着测绘任务对姿态测量精度要求的不断提升,而且有效载荷需要控制分系统提供带有高精度时标信息的姿态数据,对控制分系统时间处理的精度要求也不断提高[1].
为确保卫星载荷、控制等相关系统使用统一的时间基础,卫星必须设计高精度且可靠的时统系统,同时,各个分系统也要配合整星时统设计内部的时间系统,以保证时间系统的精确和可靠[2].
本文回顾了中国测绘卫星发展过程中控制系统几种时统方案,同时给出了一种基于硬件锁存GPS秒脉冲的高精度时统方案,并对误差进行了分析.
1 遥感卫星时统方案介绍
1.1 自守时方案
早期遥感卫星的时统主要采用自守时方案,依靠自身晶振的稳定性保证控制分系统的时统精度,一般晶振的稳定度是10-5,长时间运行时,随着时间的加长,累计误差越来越大,必然出现较大时间偏差,无法满足控制分系统时标精度要求.通过软件均匀校时的方法可在一定程度上进行误差补偿,即在软件计时中根据实测的时钟稳定性进行偏差补偿,一定程度上能够补偿晶振稳定度的偏差,但是由于晶振稳定度的变化与温度、器件等级、运行时间等多种因素有关,特别是卫星在轨长时间运行后,晶振稳定度将会发生较大变化,影响计时精度,因此只能作为粗校时方案,很难实现高精度校时[3].
1.2 软件校时方案
为确保卫星几个有计时精度要求的分系统之间具有统一且精确的时间系统,某些卫星采用频繁集中校时的方案,通过总线在一定时间内对载荷、控制等重要分系统进行一次校时,由于总线容量有限,不可能频繁校时,一般校时频率为分钟级,这样在校时期间就需要分系统进行自守时,由于重量功耗限制,控制分系统一般不采用高精度时钟(带有温控的时钟或原子钟),因此守时相对精度一般在10 μs/s左右(时钟稳定度稳定度是10-5),这样1分钟内累计时钟偏差已经接近1 ms.
1.3 统一时钟方案
采用整星统一晶振时钟的方案,整星时统系统为几个有时间精度要求的分系统统一提供高精度晶振时钟,控制系统接收该时钟作为系统时钟,引入AOCC时钟系统,作为CPU时钟.这种方法从理论上是一种高精度时统,但存在不同系统分频误差,而且整星统一时钟如发生故障,将直接导致AOCC无法工作,同时高频时钟信号的传输也会存在较多EMC问题,这种方案对于实现几个分系统同步具有一定的作用,但在可靠性、实用性等方面存在一定缺陷.
1.4 基于GPS秒脉冲的软件中断校时方案
随着GPS技术在卫星上的应用,通过GPS接收机获取精确绝对时间,并以此为时钟源对控制系统进行校时成为可能.目前普遍采用的是GPS秒脉冲+整秒信息的方式进行校时,即整星通过发送固定间隔的脉冲信号(一般每秒一次)作为分系统高精度校时的基准点,并通过数字总线等形式发送秒脉冲所对应时刻的绝对星时,这样,控制系统可依据此信息进行高精度校时.GPS秒脉冲精度能够达到20 ns[4],考虑线路处理误差,GPS 秒脉冲到达接收端时延误差优于1 μs.对于控制分系统,此方法能够为分系统提供高精度的时钟基准,且由于校时间隔小,对控制分系统自守时精度要求不高.
对于秒脉冲的使用,可采用软件中断的方式进行校时,将秒脉冲作为控制计算机的一级中断,当有秒脉冲时,产生中断,软件读取当前计时器星时(相对星时),再根据总线发送的秒脉冲所对应的绝对星时计算出当前的绝对星时.采用此方式,优点是简单可靠,缺点是由于软件中断存在时间延迟,导致从秒脉冲上升沿到软件读取GPT星时会产生时间延迟,导致时统计时不准确.如果中断种类较多,发生中断嵌套,将会增大计时误差.
对于测绘卫星,要求姿态时标具有较高的精度,因此需采用更加准确的控制分系统时统设计.
2 基于硬件的控制分系统时统设计
2.1 时统精度需求
星敏和陀螺作为目前遥感卫星主要的高精度敏感器,因此测绘卫星控制系统除满足常规控制任务外,还需为有效载荷提供带有高精度时标的星敏感器和陀螺的测量数据,根据测绘精度的要求,星敏感器和陀螺测量数据相应时标精度应优于70 μs.
2.2 硬件系统设计
为确保满足测绘卫星控制系统时统精度要求,经分析,设计了一种基于硬件锁存技术的时统方案.
控制系统AOCC与星敏感器和陀螺之间、AOCC与外部分系统之间涉及时统的信号流如图1所示:对于星敏感器,AOCC提供每个星敏一路独立的同步信号(PPS1/PPS2/PPS3),同时提供一路通讯通道,用于数据及指令传输;对于陀螺,AOCC输出一路陀螺同步信号(PPS4),同时提供一路通讯通道,用于采集陀螺数据;AOCC接收外部输入的GPS秒脉冲信号,同时通过OBDH总线接收GPS秒脉冲对应的整秒时间数据.
针对星敏感器和陀螺高精度时标要求,需要在控制系统内部设计硬件同步信号(PPS),通过硬件同步信号,对时间进行锁存.涉及到的硬件同步信号包括:GPS秒脉冲信号、星敏感器同步信号(PPS1/PPS2/PPS3)、陀螺同步信号(PPS4)、控制周期信号,其中GPS秒脉冲信号为外部输入,其余均由AOCC内部的ASIC/FPGA产生,输出给其他部分,并进行时间锁存.ASIC/FPGA内部设计一个高精度时钟锁存模块,根据硬件时钟进行高精度星时计数,并分别锁存控制周期上升沿、GPS秒脉冲下降沿、星敏感器同步下降沿、陀螺同步信号下降沿,分别存入相应寄存器,供CPU读取.
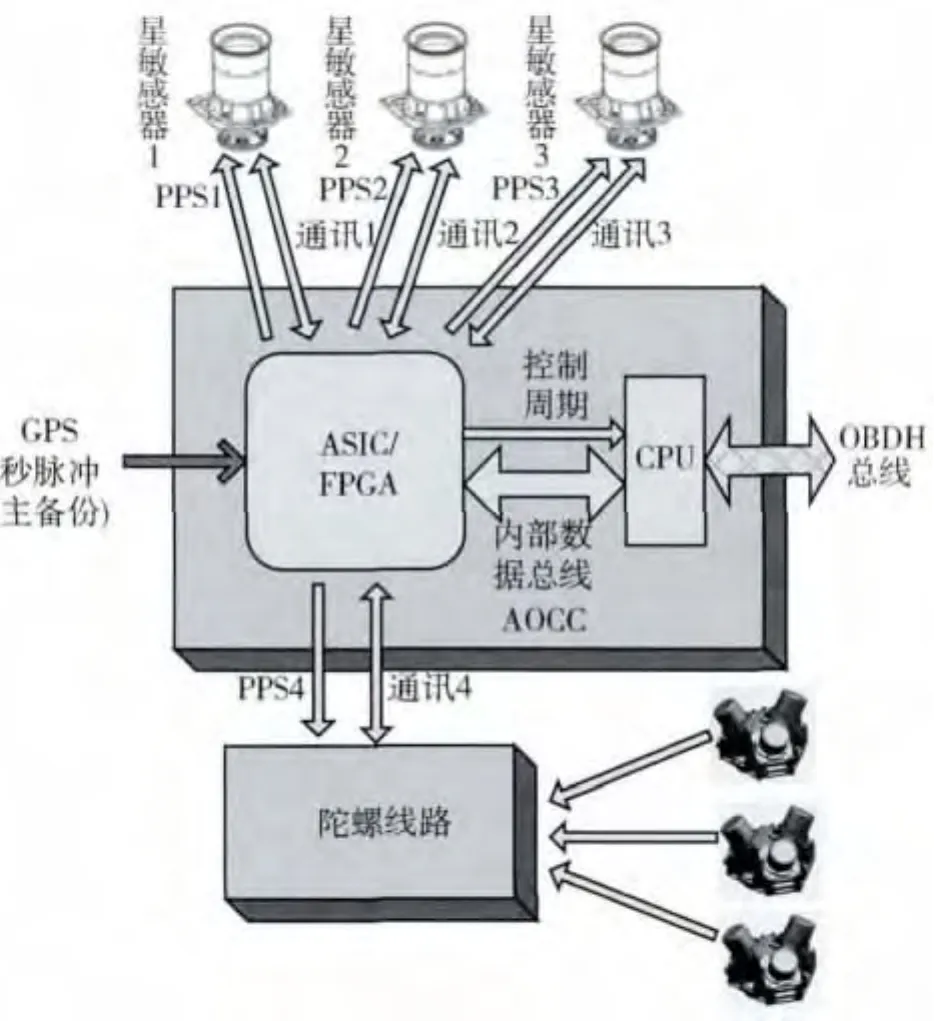
图1 时统系统信号流图Fig.1 Diagram of timing system
如图2所示,根据AOCC任务要求,选择不同长度的控制周期;根据星敏感器自身时序特点,选择星敏感器同步信号合适的频率以及相对于AOCC控制周期的合适相位,以满足星敏感器同步曝光以及数据更新的需求;陀螺信号处理一般可按照控制周期时序,因此陀螺PPS信号可以与控制周期同频率,相位可根据系统时序灵活设置.以上参数可通过CPU进行设置,以满足不同时序要求.
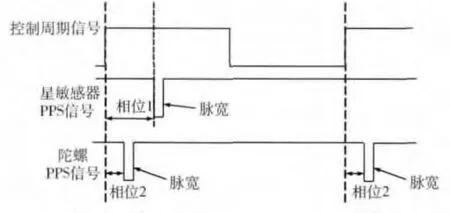
图2 同步信号示意图Fig.2 Sketch of the Synchronous Pulses
2.3 时统计算方法
时统设计的原则是AOCC通过ASIC/FPGA星时锁存模块自主进行计时,当满足GPS秒脉冲校时条件时,用GPS秒脉冲信息对AOCC使用的星时进行校正.
(1)AOCC自主进行星时计算
在每个控制周期的上升沿(触发控制周期中断程序)锁存当前的星时计数器数值,用以计算对应的绝对星时.假定AOCC的控制周期为tCON,如图3所示,第1个周期的上升沿记录的星时为T1CON,对应的绝对星时为t1CON,则在第2个周期的上升沿记录的星时为T2CON,对应的绝对星时为:

以此类推:

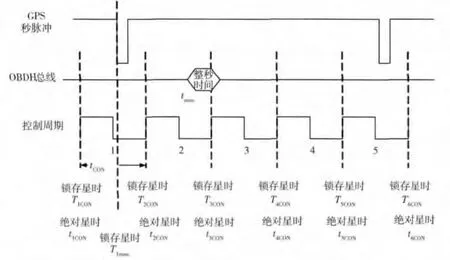
图3 控制分系统高精度校时时序图Fig.3 Timing diagram of AOCS
星时计数器溢出时,软件可判断并校正.
(2)采用GPS秒脉冲进行高精度校时
当采用GPS秒脉冲校时时,AOCC对GPS秒脉冲下降沿进行锁存,并记录对应的当前星时计数器数值,OBDH总线向AOCC发送GPS秒脉冲对应的整秒数据,通过软件对秒脉冲以及整秒数据进行正确性判别,确认正确后建立GPS秒脉冲校时标志有效;应用软件在每个控制周期开始时,对GPS秒脉冲校时标志有效性进行判断,如果满足条件,即可在本周期进行GPS秒脉冲校时,具体算法如下:
如图3所示,在第1个控制周期(例如250 ms)中,收到GPS秒脉冲,通过下降沿锁存对应的星时计数器数值T1mmc.在第2个和第3个控制周期之间通过OBDH总线接收到对应的整秒数据tmmc,此时第3个控制周期已完成绝对星时计算.在最近的第4个控制周期中采用GPS秒脉冲数据进行绝对星时计算.

相比于t4CON=t3CON+|T4CON-T3CON|,以上绝对星时的计算具有更高的精度,通过以上方式,实现整星对控制分系统的高精度校时.
(3)星敏感器及陀螺时标推导算法
星敏感器曝光与控制周期时序图见图4所示,其中dt为星敏感器输出的曝光周期相对时标,即曝光周期中心点距离星敏同步信号的相对时间差.根据该时序关系可知,其星敏感器数据时标的星时计算方法为:
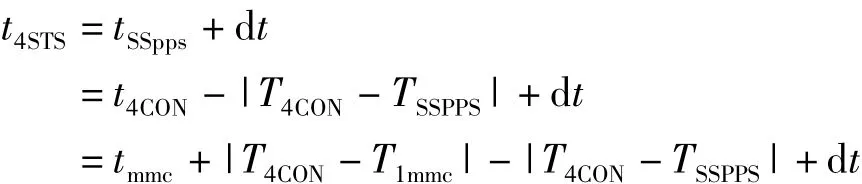
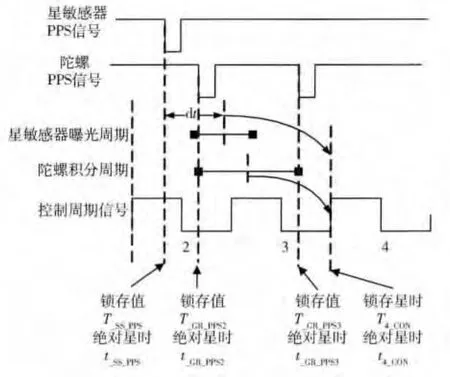
图4 星敏感器及陀螺时序图Fig.4 Timing diagram of star sensors and gyros
陀螺线路根据陀螺同步信号,对陀螺数据进行积分处理,给出处理数据,因此,AOCC软件能够根据硬件锁存的陀螺同步信号时标推算出陀螺数据所对应的高精度时标,具体算法如下:

3 时统误差分析
采用基于硬件锁存的秒脉冲校时方法,校时流程中可能造成时间延误的环节及延迟量如下:
(1)GPS秒脉冲自身时延误差:Tpd1<1 μs;
(2)接口电路时延误差:Tpd2<22 ns;
(3)ASIC/FPGA星时计数器锁存时延:Tpd3<900 ns;
(4)ASIC/FPGA星时计数器自守时误差:晶振稳定度4.0×10-5(考虑初始精度误差及寿命末期老化误差),校时周期不超过1 s,则自守时误差Tpd<40 μs.
从上可以分析得出AOCC采用GPS秒脉冲进行高精度校时的在轨实时误差

4 试验结果
该时统方案应用于某测绘卫星控制分系统技术设计中,在地面试验系统中对AOCC时统精度进行了测试,通过测试,该控制系统时统精度35 μs,满足测绘卫星对控制系统时统精度的要求.
5 结论
本文介绍了一种基于硬件锁存的卫星控制系统时统设计,能够有效提高控制系统的时统精度,从而提高姿态测量数据时标的精度,对于提高卫星定姿精度以及卫星对地测绘精度具有明显的作用.该方案具有较好的实用性和可靠性,并取得了较好的使用效果.
[1]孙承志,唐新明,周晓青,等.中国测绘卫星的未来发展[C].全国地理信息产业峰会论文集.北京:中国测绘局,2009:273-280.
[2]胡莘,曹喜滨.三线阵立体测绘卫星的测绘精度分析[J].哈尔滨工业大学学报,2008,40(5):695-699.HU C,CAO X B.Analysis on precision of stereo mapping microsatellite using three-line array CCD images[J].Jurnal of Harbin Insittute of Technology,2008,40(5):695-699.
[3]魏丰,朱广伟,王瑞清,等.一种GPS校准的数字式高精度守时钟[J].仪器仪表学报,2011,32(4):920-926.WEI F,ZHU G W,WANG R Q,et al.GPS disciplined precise digital timekeeping clock[J].Chinese Journal of Scientific Instrument,2011,32(4):920-926.
[4]MUMFORD P J.Relative timing characteristics of the one pulse per second(1 PPS)output pulse of three GPS receivers[C]//The 6thInternational Symposium on Satellite Navigation Technogy Including Mobile Positioning& Location Services,2003.
[5]单庆晓,杨俊.卫星驯服时钟系统的新进展[J].测试技术学报,2009,23(5):397-401.DAN X Q,YANG J.Review of satellite disciplined clock system[J].Journal of Test and Measurement Technology,2009,23(5):397-401.
[6]黄翔,江道灼.GPS同步时钟的高精度守时方案[J].电力系统自动化,2010,34(9):74-77.HUANG X,JIANG D Z.Ahigh accuracy time keeping scheme based on GPS[J].Automation of Electric Power Systems,2010,34(9):74-77.
猜你喜欢
数学小灵通·3-4年级(2021年9期)2021-10-12
小学生学习指导(低年级)(2020年10期)2020-11-09
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
快乐语文(2018年36期)2018-03-12
北京航空航天大学学报(2017年9期)2017-12-18
