
半圆板与齿条板焊缝超声检测技术
2014-05-05 08:54路宝学
船舶职业教育 2014年6期
路宝学
(渤海船舶职业学院,辽宁兴城125105)
半圆板与齿条板焊缝超声检测技术
路宝学
(渤海船舶职业学院,辽宁兴城125105)
通过建立数学函数及利用MATALB软件建立图表,研究不同探头对自升式平台桩腿半圆板与齿条板焊缝的超声波检测情况,明确不同角度探头的声束扫查覆盖范围,确定扫查截面范围的重合区域。结果表明,半圆板与齿条板焊缝的不同位置需要采用不同角度的探头联合进行扫查,为检测类似形状工件提供了一种可行的方法。
自升式平台;超声波检测;半圆板与齿条板;声束覆盖
0 前言
自升式钻井平台又称甲板升降式或桩腿式平台,这种平台一般由平台本体(或称浮体)、升降装置和桩腿(一般3~4个) 等部件组成。自升式海洋平台服役过程中,所处的海洋环境十分复杂和恶劣,台风、海浪、海流、海冰和潮汐、海底地震等都对平台的安全构成严重威胁,由半圆板与齿条板焊接而成的桩腿承受载荷较大,因此对半圆板与齿条板焊缝焊接质量的要求也较高,需进行100%的超声波检测。由于半圆板壁厚,且坡口形式复杂,焊缝并非是全焊透的情况,受几何条件影响,超声波检测的难度较大,其主要体现在以下两个方面:一方面受几何条件影响,单一探头不能全部覆盖整个焊缝扫查区域;另一方面由于检测面为圆弧面,用平试块调节仪器时,应对深度、水平显示数据进行修正,不能直接读取仪器上的数据,而需用直尺确定位置来判断回波信号是否在焊缝中,所以造成缺陷判断及定位存在困难。本文从焊缝节点的几何形状入手,在作图法的基础之上,运用里波法原理,通过数学函数,借助计算机MATLAB软件,绘制函数曲线,建立图表,明确不同角度探头的扫查范围,正确选择探头,提高探伤效率。
1 试件结构形式
由某厂建造的R550D自升式钻井平台,桩腿采用桁架式结构,其半圆板、齿条板均采用超高强度钢,半圆板厚度为82 mm,半径254 mm,齿条板厚度为177.8 mm,半圆板与齿条板焊缝结构如图1所示。

图1 半圆板与齿条板焊缝结构图
2 探头声束扫查焊缝截面的覆盖情况
半圆板与齿条板焊缝采用横波探头进行检测,选用的超声波探头需要保证能够扫查到整个焊缝截面,以避免出现漏检的情况。由于该构件的坡口形式较为特殊,需要通过计算明确45°、60°、70°探头扫查区域的情况。这里通过建立平面坐标系来讨论声束的覆盖情况。
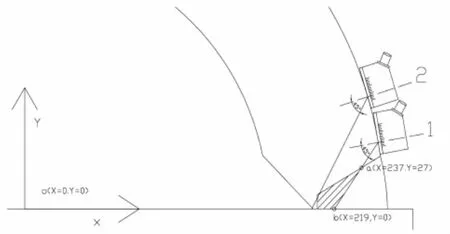
2.1 平面坐标系的建立
以半圆板的圆心为坐标原点O(X=0,Y= 0),以齿条板为X轴,以垂直齿条板方向为Y轴,建立坐标系如图2所示。

图2 平面坐标系
参数设定:设入射点为I,折射角为β,焊缝的轮廓点为C、F、D、E,其中圆弧CE为半圆板圆弧的延伸线,声束IB与OE(X轴)的夹角为γ,法线IO与齿条板OE的夹角为θ。
根据半圆板已知参数半径R=254 mm,T=82 mm,焊缝坡口角度为30°,可以得出坐标:O(0,0),C(251,35),D(207,0),E(254,0)。
2.2 建立函数关系计算扫查范围
假设入射波IB的声程为

则有
k=tan(γ)=tan(θ+β)
将I点坐标(Rcosθ,Rsinθ)代入方程进行计算,可得到
b=Rsin(θ)-Rcos(θ)tan(θ+β)入射波主声束IB的方程可写为

可以利用方程计算出主声束与两侧坡口的交点。对于45°探头,β=45°,声束与半圆板侧坡口面CF交点为A点,与齿条板(X轴)交于B点,计算出A点和B点的极限坐标值即可得出声束的扫查范围。
由于坡口角度为 30°,且 C点的坐标(252,35),坡口面CF的方程为

由式(2)、(3)可得出A点的X坐标为

将入射角β=45°代入式(4),利用计算机数学软件MATLAB可以绘制出探头位置角θ与XA之间的关系,如图3所示。

图3 45°探头入射点位置角θ与XA之间的关系
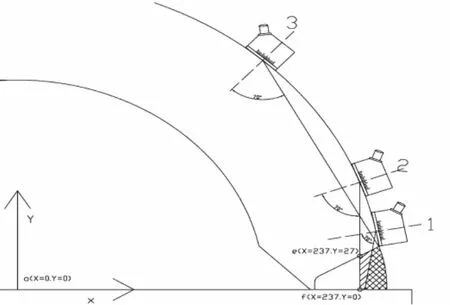
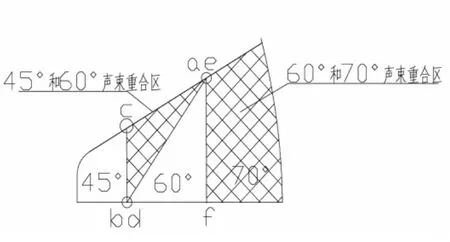
从图3可以得出,当采用45°探头,且θ= 42.95°时,XA的最小值为179,由于F点坐标(X=207,Y=27),即XA 同理,可以计算出60°探头的A点最小值X=219;70°探头的A点最小值X=237,可见60°和70°探头无法扫查到A点。 利用上述方法,通过OE的方程可以计算出3种角度探头的B点的极值为 通过计算可得到,45°、60°、70°B点坐标X的最小值与其A点坐标X的最小值近似相等。这是因为每种角度探头在移动过程中声束的扫查范围是一个环形,两侧坡口与此环形内圆的交点即为A、B点的极限值,由于坡口的间距远小于扫查环形的内径,所以可以将A、B点的极值与横坐标近似相等。 如图4所示,45°探头的扫查区域情况是探头在1号~2号位置,一次波能够进入焊缝中,能扫查到焊缝根部,2号~3号位置主声束无法进入焊缝区域,3号~4号区域因声程较长,且主声束贴近内壁,声束扩散的声波会产生一定干扰,不利于缺陷判断,所以不建议用于扫查;60°和70°探头由于XA>XF,不能扫查到焊缝根部。此外,由于70°探头声束贴近外壁,声束扩散引起的干扰同样也不利于缺陷的判断,所以选择60°探头扫查焊缝上部区域。 采用45°探头和60°探头联合扫查焊缝截面时,扫查区应存在叠加才能保证扫查到整个截面。只要探头移动合适的距离,60°探头可以扫查到整个焊缝上部截面,比较60°探头扫查到最大深度时与45°探头在位置1时(探头所能达到的最前端)的A、B两点坐标就可以得出声束是否满足全覆盖条件。 图4 45°探头的扫查范围 常用的45°探头前沿为8 mm,按设计图纸焊缝宽度35.3 mm,可以计算出θmin角度为 代入式(4)、(5),得出45°、60°、70°探头对应的A、B坐标,可以画出45°、60°、70°声束的扫查截面范围及重合区域,如图5、6、7、8所示。 图5 45°声束的扫查截面范围 图6 60°声束的扫查截面范围 图7 70°声束的扫查截面范围 图8 45°、60°、70°声束的扫查截面范围重合区域 通过建立函数关系计算出超声波的声束与半圆板和齿条板焦点的极限坐标方程。利用MATALB软件建立图表后可以得出不同探头的扫查范围,确定扫查截面范围的重合区域。 半圆板与齿条板焊缝超声检测应该采用不同角度的探头联合进行扫查,确定45°探头主要扫查焊缝根部、60°探头主要扫查焊缝中部及上部、70°探头主要辅助检验焊缝上部缺陷。 [1]王定亚,丁莉萍.海洋钻井平台技术现状与发展趋势[J].石油机械,2010(4):69-72. [2]王锦松.浅谈目前海洋钻井平台技术与未来发展趋势[J].经营管理者,2012(17):363+341. [3]林尤文,程志虎.TKY管节点焊缝超声波探伤缺陷定位技术:里波反射研究[J].广船科技,1994(4):31-34+41. [4]李海华,赵立凡,唐飞阳亮,等.不同检测方法在对接焊接接头检测中的对比[J].无损检测,2009(4):277-279+285. [责任编辑:刘 月] The Welding Seam Ultrasonic Testing Technology of Semicircular Plate and Gear Rack Plate LU Baoxue Through mathematical functions establishment and graph drawing by MATALB software,the researcher studies on different probes'ultrasonic testing case on jack up platform spud leg semicircular plate and gear rack plate welding seam,clears the acoustic beam coverage of different angle probes and identifies the overlap regions of scanning section.The results show,the different welding seam positions of semicircular plate and gear rack plate need to be scanned by different angle probes jointly,to provide a feasible method for similar shape workpiece detection. jack up platform;ultrasonic testing;semicircular plate and gear rack plate;acoustic beam coverage TG115.28+5 A 2095-5928(2014)06-32-04 2014-08-25 路宝学(1982-),男,辽宁葫芦岛人,讲师,学士,研究方向:材料成型与检测。
3 结果与分析


4 结论
(Bohai Shipbuilding Vocational College,Xingcheng 125105,China)
猜你喜欢
装备维修技术(2021年47期)2021-07-12
无损检测(2021年6期)2021-07-01
装备维修技术(2021年46期)2021-03-07
孩子(2021年1期)2021-01-27
水运工程(2020年2期)2020-02-26
物流技术与应用(2019年6期)2019-07-16
综合智慧能源(2018年11期)2018-12-18
小学生学习指导(高年级)(2018年10期)2018-10-10
中等数学(2018年6期)2018-08-02
工业设计(2016年10期)2016-04-16
