一种融合显著性的Adaboost电视制导图像变尺度目标快速检测方法研究
2014-04-23 09:20:18钱昆
指挥控制与仿真 2014年2期
钱 昆
(解放军陆军军官学院,安徽 合肥 230031)
电视制导武器进行地面目标自主攻击时,需要在末端制导时实时检测出目标,确定目标位置与弹轴中心的偏差量。但制导过程中随着弹目距离的改变,目标尺寸发生快速变化,即随着弹目距离的减小,目标尺度呈现非线性快速变大。传统的图像目标检测算法如模板相关匹配法[1]、背景建模法[2]、基于识别的方法[3]等,虽然对目标的检测方式各不相同,但算法较难适应目标尺度发生较快变化的情况。模板相关匹配法要求预装模板与目标实时的尺寸相近,其在制导过程中模板更新机制难以确定;基于背景建模法要求图像背景较为稳定,其无法适应制导图像的快速变化;基于识别的方法需要提取大量的对尺度具有不变性的高维特征,进行分类器的训练,如SVM支持向量机、神经网络模型、Boosting方法等,这类方法对图像质量要求较高,对纹理不丰富目标的检测效果不理想,且运算量较大;在战场环境中,要求系统有较高的实时性和可靠性,因此,上述算法很难满足战场需求。
针对这些问题,本文采用一种融合改进的Adaboost目标检测方法,通过提取图像的显著性区域,从而有针对性地检测目标,减少计算量。在考虑弹目距离较远时,电视制导画面成像不清晰,纹理不丰富情况下,该方法能很好地提取出块状目标,针对海面或沙漠等背景较为单一的区域目标检测较为有效。
1 融合显著性的检测
1.1 显著性检测
人类视觉可以在无经验情况下快速搜索到感兴趣目标,依靠的就是图像显著性。显著性检测方法有很多,如 Itti方法[4],GBVS 方法[5]等,但这些方法计算较为复杂,不利于硬件实时地实现,本文采用一种实现较为简单的剩余谱[6]理论的显著性检测方法,这种方法可描述为一幅图像的log振幅谱减去平均log振幅谱就是显著性部分,其检测效果如图1~3所示。
提取出的区域用矩形框标出,通过显著性区域提取,就大致确定了目标尺度,为下一步识别提供方便。对于单一背景下的目标检测,由于目标相对于背景的显著性较强,因此采用显著性方法能有效地框出疑似目标。

图1 海面舰船可见光图像
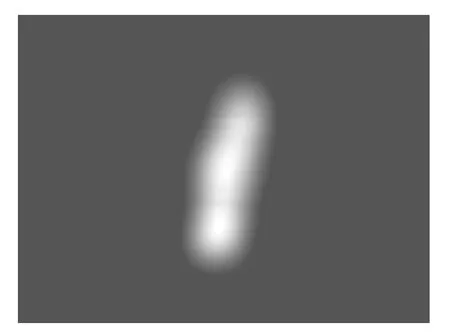
图2 图像显著性区域提取
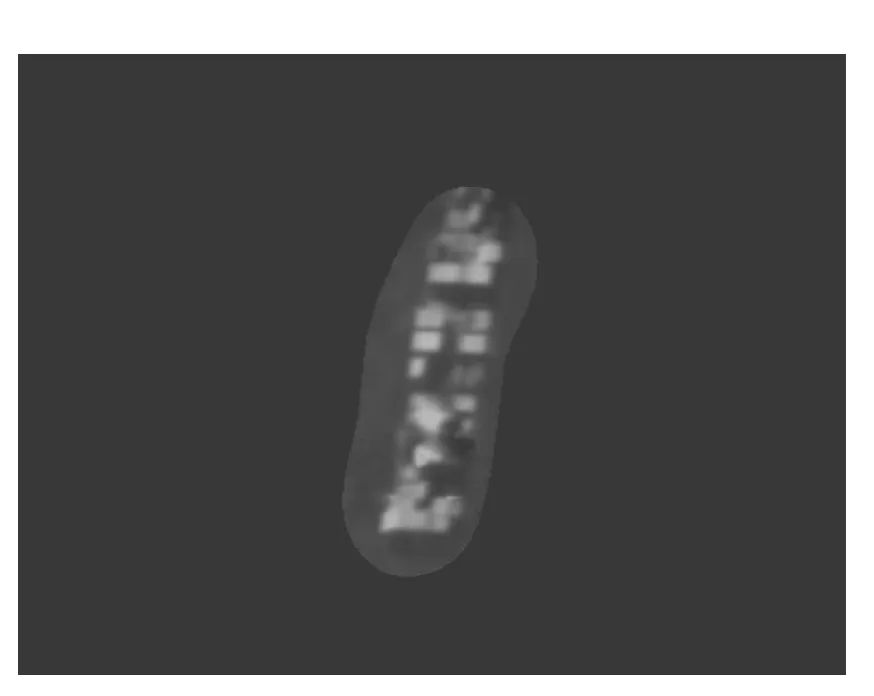
图3 提取出的待检测区域
1.2 Adaboost检测
Adaboost[7](Adaptive Boosting的简称)是一种Boosting目标识别分类器训练方法,其思想是针对同一类样本训练不同的弱分类器,然后把这些弱分类器集联起来,最终形成一个强分类器。Adaboost算法训练分类器时利用了Haar特征和积分图像来加快训练速度。由于矩形特征的特征值计算只与此特征端点的积分图像有关,而与图像坐标值无关,使得特征提取速度大大提升,同时又采用级联式的联合分类器,可以加快目标的检测速度。
原有的Adaboost检测需要将图像进行不同尺度金字塔式的降采样,然后再进行滑动窗口提取识别,这种做法无疑增加了计算量,同时利用滑动窗口的提取可能导致目标提取不完整,导致检测不出目标。本文将Adaboost方法应用于电视图像目标检测,由于前期利用显著性确定了目标的大致尺寸,下一步则直接利用Adaboost对提取出的区域进行识别。
本文提出的检测方法具体步骤总结如下:
1)收集目标样本进行Adaboost级联式分类器的训练,这属于前期准备工作也称为离线学习;
2)对获取的每一帧图像进行直方图均衡化和去噪等预处理,之后利用基于剩余谱的显著性区域提取方法,提取出区域,区域的边界由矩形框标出,从而确定目标尺寸;
3)对提取出区域直接利用训练好的Adaboost级联式分类器进行识别,这个过程属于在线监测。
由于AdaBoost分类器是属于级联式的分类器,对于非目标窗口,它被最初的几个弱分类器识别时就能够被判断是否为目标,因此不需要进行完全级联式地识别,减少了消耗时间,保证了检测的实时性。
综上所述,本文的检测总流程如图4所示,它由离线学习和在线检测两部分组成,离线学习是利用收集的训练样本经过Adaboost算法的训练,得到表示目标模型的分类器;在线检测是指利用得到的分类器检测图像确定是否为目标。
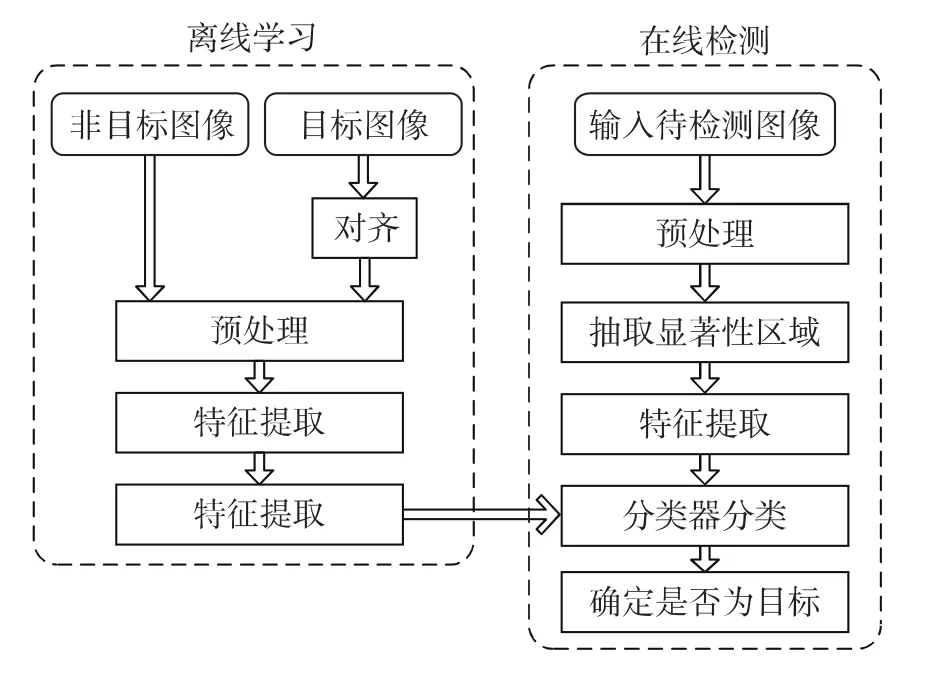
图4 本文目标检测流程
2 实验与分析
本文利用 OpenCV1.0[8]与 VC++6.0 实现基于Adaboost算法的检测识别,实验平台配置:CPU为Intel Core2 Quad CPU Q9400 2.66GHz,内存为 4G,Windows XP操作系统。
分类器需要通过训练样本得以实现识别功能,因此需要选取事前获得的目标区域模板和非目标模板,进行分类器训练。选取事前获得的地面圆形靶标区域图像150张作为正样本,其中不含背景图像,同时选取任意背景大小的图(不包含目标)150张作为负样本,正样本都是统一经过裁切缩放对齐成24×24像素的BMP格式的图片,负样本是不含有正样本模式的任何图像,如图5、图6所示。

图5 正样本示例
图6 负样本示例
本文将分类器的级联数设置为20个,虚警率设置为10-6,训练耗时约20小时,训练完之后,采用cvLoad-Image函数循环导入序列图像,cvLoad函数载入训练好的分类器,cvHaarDetectObjects函数进行检测识别,程序对每一个显著性区域进行预处理和特征提取,然后送入分类器中来判断该窗口中是否为目标。
实验利用某次外场实验获取的图像进行本文方法的目标自主检测,为了与原算法进行对比,实验中视频图像利用传统Adaboost方法进行目标检测。利用本文方法其检测识别效果如图7所示,图中的方框所标示的区域即为目标。
统计检测识别结果,模板检测窗口能随着目标的快速非线性变大而增大,共检测300幅图像,有32幅图像出现漏检,误检12幅,检测率为85.33%。实验结果表明:检测一副720×586大小的图像,平均耗时16.6ms,小于电视场扫描时间20ms,在普通PC上达到了实时性。同时统计利用改进前的方法进行检测结果,两者对比如表1所示,可见利用本方法无论是在检测率还是在耗时上都优势明显。
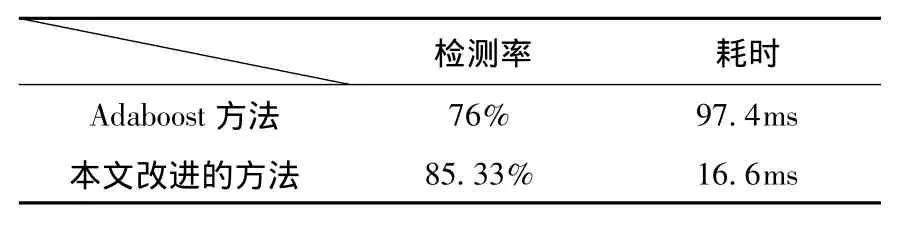
表1 两种方法检测结果对比
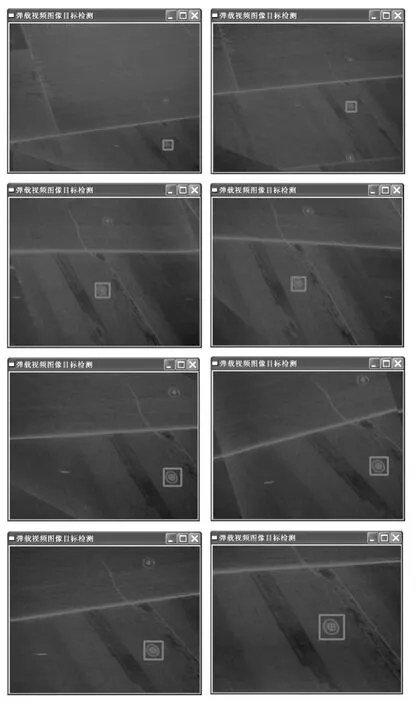
图7 检测识别结果
3 结束语
本文将显著性检测融入Adaboost目标检测中,在普通计算机上达到了实时性,针对海面或沙漠等背景较为单一的区域,取得了很好的检测效果,适应了目标的尺度快速变化,但使用本文方法前期准备工作量大,需要获取大量目标模板,对于实际战场应用还有许多问题待研究。下一步将针对检测率的提高及该算法的硬件化设计进行研究,为实现电视制导武器的自寻的奠定基础。
[1]张万清.飞航导弹电视导引头[M].北京:中国宇航出版社,1994.
[2]Stauffer C,Crimson W.Adaptive Background Mixture Models for Real-time Tracking[C]//Proc IEEE Conference on Computer Vision and Pattern Recognition,Fort Collins,Colorado,1999(2):246-252.
[3]R.Fergus,P.Perona,A.Zisserman.Object Class Recognition by Unsupervised Scale-invariant Learning[C].Proc.CVPR,2,2003.
[4]L.Itti,C.Koch,E.Niebur.A Model of Saliency-Based Visual Attention for Rapid Scene Analysis[C].PAMI,1998:1254-1259.
[5]J.Harel,C.Koch,P.Perona.Graph-based Visual Saliency[C].Advances in Neural Information Processing Systems,19:545,2007.
[6]X.Hou,L.Zhang.Saliency Detection:A Spectral Residual Approach[C]//IEEE Conf.Computer Vision and Pattern Recognition,2007.
[7]Paul Viola,Michael J.Jones.Rapid Object Detection U-sing a Boosted Cascade of Simple Features[C]//Proceedings of the 2001 IEEE Computer Society Conference,Computer Vision and Pattern Recognition,2001(1):511-518.
[8]刘瑞祯,于仕琪.OpenCV教程——基础篇[M].北京:北京航空航天大学出版社,2007.
猜你喜欢
建材发展导向(2022年23期)2022-12-22 07:30:02
建材发展导向(2022年12期)2022-08-19 02:33:10
电子制作(2019年24期)2019-02-23 13:22:26
西南交通大学学报(2018年5期)2018-11-08 10:58:04
电子测试(2018年1期)2018-04-18 11:52:35
苏州科技大学学报(自然科学版)(2017年1期)2017-03-20 15:25:20
知识产权(2016年8期)2016-12-01 07:01:32
光学精密工程(2016年4期)2016-11-07 09:05:00
光学精密工程(2016年3期)2016-11-07 09:03:33
中国房地产业(2016年24期)2016-02-16 06:10:20