
超声速条件下多体干扰与分离试验研究
2014-04-17 10:35王元靖钱丰学畅利侠易国庆
实验流体力学 2014年3期
王元靖,钱丰学,畅利侠,易国庆,陶 洋
(中国空气动力研究与发展中心,四川绵阳 621000)
0 引 言
现代新军事变革引发军事技术日新月异,带来武器系统设计和打击理念的逐步更新。美国于2002年提出了“快速全球打击(Prompt Global Strike)计划”,大力发展新型打击武器,力求具备1小时内用常规武器对全球任何目标实施打击的能力,这种能力正在成为美军新的非核战略威慑手段,而发展通用航空飞行器(CAV)是实现这一能力的重要环节。CAV是一种无动力再入的无人(高)超声速机动滑翔打击武器系统,它由可重复使用飞行器或不可重复使用飞行平台发射到亚轨道,利用(高)超声速滑翔技术到达目标区域,然后运用燃气活塞式抛撒或气囊式抛撒等技术将所携带的多枚捆绑子弹以预定速度从CAV机体内部推出,实现对地精确打击。这种武器平台具有飞行速度高、突防能力强、打击力度大的特点,是快速到达、快速打击战略体系的重要平台之一。但CAV在滑翔、突防和载荷释放/打击过程中,飞行条件复杂、速域宽广、姿态多变,面临一系列严重的气动力问题。尤其在释放分离过程中,载荷面临大速压、大非对称后体严重干扰等引发的多体间激波/激波、激波/尾流、激波/边界层干扰等复杂流动结构。这种干扰会导致明显的非定常、非线性以及非对称空气动力效应,对分离方案设计和分离动力学模拟提出了严峻挑战。如果分离方案设计不合理,可能导致母机和载荷分离失败,甚至导致更加严重的后果。
美国在1986年挑战者号航天飞机上升失事后,开始重视轨道器与外燃料箱分离的多体分离动力学研究,并发展了一系列试验技术和系统分析工具。随着美国精确打击飞行器发展以及滑翔弹药投送系统项目的提出,美国人针对CAV系统综合运用燃气活塞式抛撒技术和气囊式抛撒技术的特点(见图1),利用CFD技术、风洞网格测力试验技术、风洞投放试验技术开展了一系列投放/分离过程中的多体干扰研究,为CAV系统的载荷安全释放提供了很有价值的结果。经过数10年的研究,美国对多体干扰与分离过程中的复杂流动现象有着深入的认识,在相关研究领域取得了丰硕的成果[1-5]。相对而言,虽然我国已有的CTS和网格测力试验技术基本能够满足战斗机武器投放的气动力测量需要,但由于(高)超声速飞行器级间分离中的干扰特性更为复杂,试验技术和研究方法建立难度更大,加之需求牵引不足,致使我国在该方面的研究长期处于初级阶段[6-7]。
图1 国外CAV多体分离方案Fig.1 Separation Scheme of CAV
针对国外研究的热点方案,设计了一套类CAV方案模型,利用在跨/超声速风洞中建立的网格测力试验技术对该方案的分离过程进行模拟,并对多体干扰下的飞行器气动特性进行初步研究和分析。
1 试验设备和模型
1.1 风 洞
试验在中国空气动力研究与发展中心高速所的0.6m×0.6m跨/超声速风洞中进行(见图2)。该风洞是试验段横截面为0.6m×0.6m的直流暂冲式跨/超声速风洞。试验马赫数范围为0.4~4.5。

图2 0.6m×0.6m跨/超声速风洞Fig.2 0.6m×0.6mtransonic/supersonic wind tunnel
风洞现有一套四自由度机构,由上迎角(α)机构、下α机构和固块式中部支架组成。上α机构、下α机构既可联动,又可脱开独立运动。超声速试验时,下α机构可实现模型投放。
1.2 模型与支撑装置
根据资料调研结果,研究模型由母机模型与载荷模型组成。母机模型采用升力体构型,载荷模型为钝头旋成体构型(尾部沿周向均布弧形翼)。专门加工了一个椭球体构型(称为气囊模型),通过装、拆气囊模型来分别模拟采用气囊抛撒方案和燃气活塞抛撒方案时的载荷构型。母机模型采用背部支撑方式与风洞上α机构相连;载荷模型采用尾支撑方式与风洞下α机构相连(见图3)。

图3 研究模型与试验方案Fig.3 The model and the experiment scheme
1.3 天 平
试验采用两台六分量天平分别测量母机和载荷模型的气动力。天平设计载荷及静校结果见表1和2。

表1 2N6-21A天平设计载荷Table 1 Design load of 2N6-21Abanlance
表2 3N6-24天平设计载荷Table 2 Design Load of 3N6-24Banlance
2 试验条件
2.1 模型姿态
重点研究了M=3条件下,多体分离过程中载荷模型气动特性的变化规律。试验中,母机模型迎角保持α1=0°,载荷模型迎角范围为-5°≤α2≤5°。
2.2 坐标系定义及网格测力点分布
载荷模型头尖部位于母机模型底部平面内时,取X=0mm,顺气流方向为正;零迎角条件下,载荷模型中心线与母机模型中心线(风洞轴线)重合时,取Y=0mm,垂直向上为正。试验过程中,载荷模型重心始终位于Z=0mm平面内,即分离始终处于母机模型的垂直对称面内。地面调试结果表明,机构在X、Y方向的定位精度小于0.1mm,能够精确定位模型相对位置。
为了确定载荷模型的运动范围,结合CFD技术模拟了M=3、迎角α1=0°时的母机底部绕流结构。根据流场演变规律以及具体的试验要求,最终确定了载荷模型网格测力点分布范围为-30mm≤X≤420mm、-34mm≤Y≤0mm,如图4所示。
图4 网格测力点的分布Fig.4 Distribution of the force measurement grid
3 结果分析
模型姿态变化是影响CAV多体分离安全性的主要原因。在投放和分离过程中,母机模型和载荷模型的气动特性(如俯仰力矩)变化均应尽可能平稳可控。
图5给出了CAV多体系统分离中母机模型俯仰力矩(Cm)的变化。图中符号“N”和“W”分别代表无、有气囊载荷模型的分离过程。结果表明,载荷模型轴向和法向位置变化对母机模型的气动特性(如俯仰力矩)基本无影响。因此,主要集中分析多体分离过程中载荷模型气动力(矩)在母机干扰下的变化规律。
图5 分离对母机模型俯仰力矩的影响Fig.5 Effect of separation on pitch moment of external model
3.1 分离方案对气动特性的影响
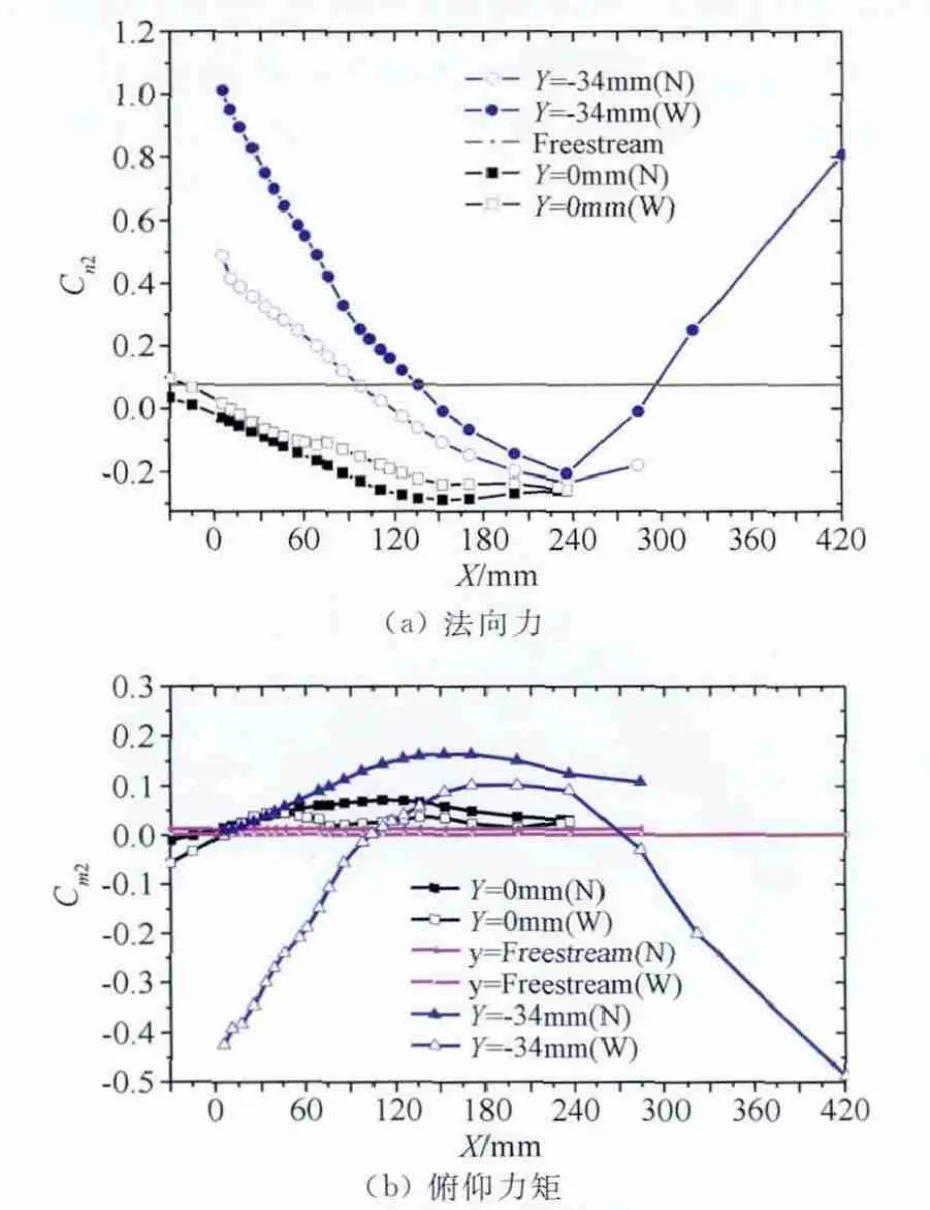
图6 分离方案对载荷模型网格测力试验结果的影响Fig.6 Effect of separation scheme on aerodyamic characteristics of the internal model
目前,国外典型的载荷抛撒方案有两种:气囊式抛撒和燃气活塞式抛撒方案(通过装、拆气囊模型分别模拟两种方案)。图6给出了采用不同分离方案时载荷模型气动特性变化规律。结果显示,气囊使得分离过程中载荷模型的法向力和低头力矩增加,且气动特性变化更为剧烈。X≤240mm范围内,两种构型的载荷模型气动力差异呈逐步缩小趋势,随着载荷模型进一步远离母机模型底部(X>240mm),两种构型载荷模型的气动力差异又呈逐步增大趋势。上述结果说明气囊构型受底部流动状态变化更为显著。
3.2 分离位置对载荷模型气动特性的影响
图7给出了载荷模型在母机尾迹中的网格测力试验结果(无气囊载荷模型试验结果)。试验中母机模型和载荷模型均保持α=0°。
结果显示,轴向(X)位置以及法向(Y)位置的变化均会对载荷模型的分离气动特性产生明显影响。分离开始后,载荷模型法向力(Cn2)沿轴向逐步反向增大,并在某一轴向位置处达到最大值,之后趋于平缓(见图7(a));同时,载荷模型的俯仰力矩(Cm2)呈明显抬头趋势(见图7(b)),沿轴向先增大后减小,并逐步接近自由流条件下的俯仰力矩。分离过程中,俯仰力矩出现了变号现象,说明其可能发生俯仰失稳现象(不利于模型姿态稳定),在载荷模型尚未完全从母机内腔脱离时,有发生碰撞的危险。载荷模型气动特性沿轴向的变化规律说明,轴向流态变化是影响载荷模型分离气动特性的重要因素之一。而载荷模型法向移动时,其气动特性量值受到法向位置的明显影响。如相同轴向位置处,载荷模型法向力量值差异明显,随着载荷模型沿法向远离母机中心线,载荷模型法向力逐步增大。X>240mm后,法向位置对模型法向力影响逐步降低,说明母机模型底部尤其是近底部流动沿法向的改变同样是影响载荷模型分离气动特性的重要因素。载荷模型轴向力变化规律也显示了轴向位置和法向位置变化对载荷模型气动特性的影响。
3.3 多体分离对载荷模型气动特性的影响分析
超声速条件下,母机模型底部存在膨胀波区、压缩波以及尾迹流动区,并沿轴向逐步向自由流区域发展。沿轴向运动过程中,载荷模型气动力主要受到尾迹流动向自由流过渡过程中的当地流速变化影响。如图8(a)的纹影结果显示,在分离初始位置处(X=5.28mm),位于底部区域部分的载荷模型头部未出现头部激波,随着模型沿轴向逐步向自由流区域发展,载荷模型头激波支配范围逐步增大(X=85.78mm),其气动特性逐步接近自由流条件下的气动特性,如图7(c)中载荷模型轴向力沿轴向逐渐增大并接近自由流中的结果。
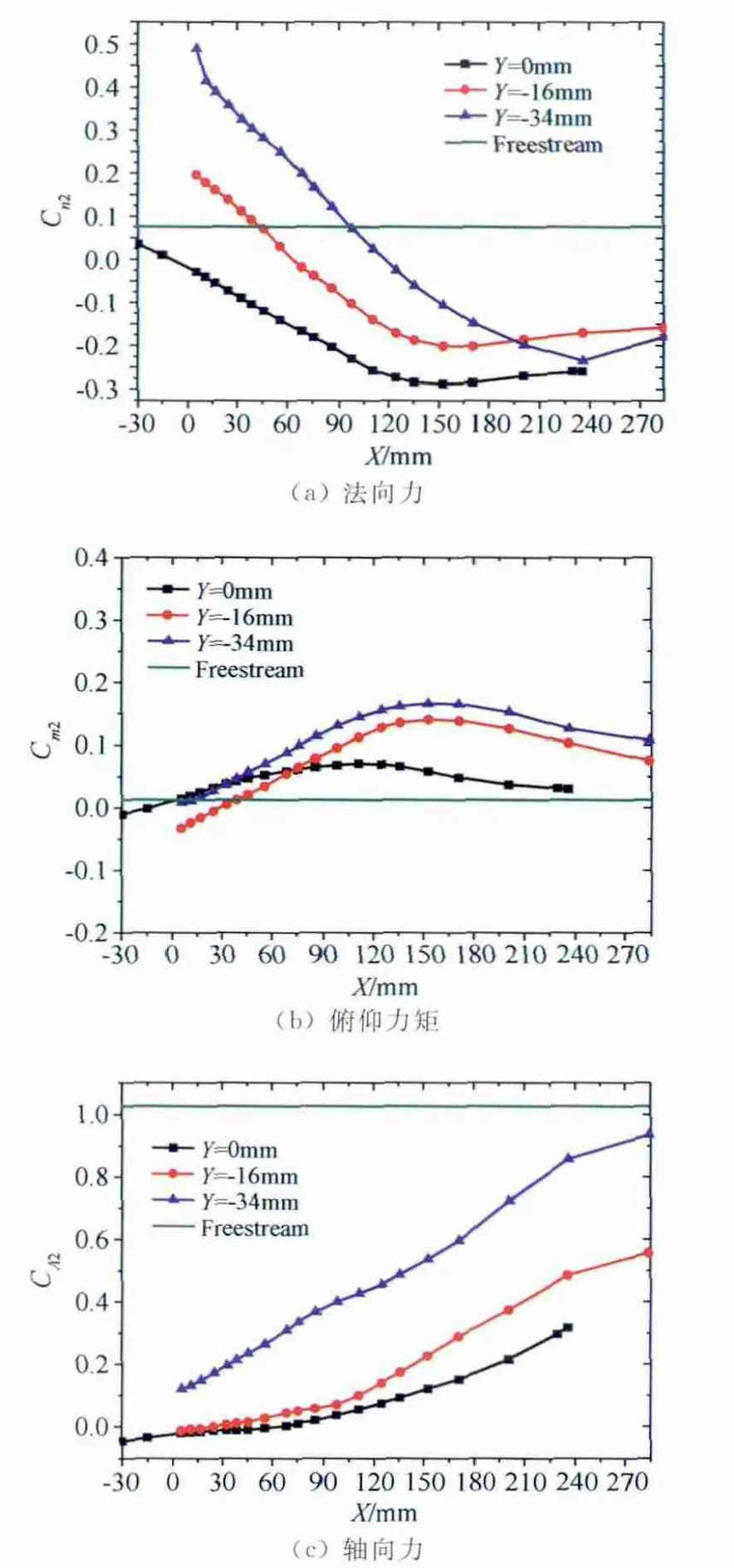
图7 分离位置对载荷模型气动特性的影响Fig.7 Effect of separation location on aerodyamic characteristics of the internal model
图8中纹影照片显示,相同轴向位置、不同法向位置处的载荷模型头激波形态差异明显(如Y=-34mm时,载荷模型头尖部从初始阶段就出现了头激波),导致法向位置变化对载荷模型气动特性的量值影响幅度较大(见图7)。由于在超声速条件下,母机模型底部流动分别存在膨胀波区域、压缩波、尾迹区、压缩波、膨胀波区域(见图9),载荷模型法向位置的改变导致其所处干扰区域变化较大,因而对其气动特性产生较大影响。同时,由于母机模型底部的非对称结构,底部上下表面处的流动膨胀程度出现较大差异,沿法向的局部流动速度变化梯度大,因此影响了载荷模型的气动力量值。例如当载荷模型沿法向向下移动时,母机模型底部下半部分导致的气流膨胀影响增加,速度增加,且方向向上,导致载荷模型法向力较Y=0mm时的法向力量值更大。
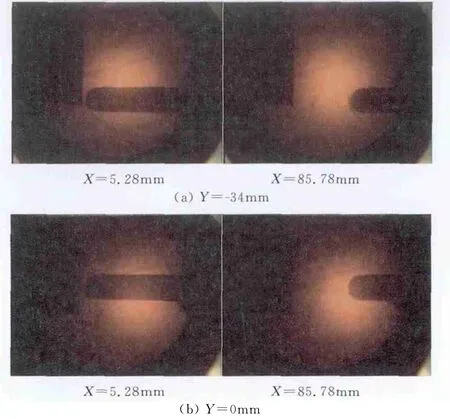
图8 载荷模型网格测力纹影Fig.8 Flow display during the separation(schlieren)
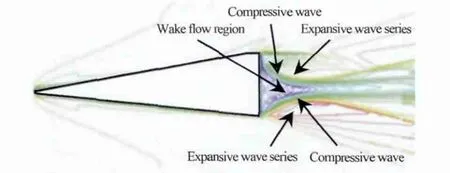
图9 母机模型底部流动结构示意Fig.9 Sketch of the base flow(external model)
4 结 论
载荷模型气动特性受分离位置变化的影响非常明显。引发这种现象的原因有两个:
(1)载荷模型从母机模型尾迹流动区域向自由流区域过渡过程中,尾迹的逐步发展以及头激波的逐步发展通过影响载荷模型表面流动状态而影响其气动特性;
(2)在母机模型底部流动区域,母机底部不对称使得底部流动膨胀程度存在明显差异,造成沿法向干扰区域变化梯度大,导致载荷模型气动特性量值变化较大。
[1] Kelly J Murphy.Experimental stage separation tool development in NASA langley′s unitary plan wind tunnel[R].AIAA 2004-4727,2004.
[2] Klaus Decker.Unsteady aerodynamics of a hypersonic vehicle during a separation phase[R].AIAA 2001-1852,2001.
[3] David E.Hyper-X stage separation background and status[R].AIAA 99-45480,1999.
[4] William C Woods.Hyper-X stage separation wind-tunnel test program[J].Journal of Spacecraft and Rockets,2001,38(6):811-819.
[5] Peter A Liever.Stage separation analysis of the X-43Aresearch vehicle[R].AIAA 2004-4725,2004.
[6] 王志坚,伍贻兆,林敬周,等.某运载火箭级间分离喷流干扰风洞试验研究[J].实验流体力学,2009,23(2):15-19.Wang Zhijian,Wu Yizhao,Lin Jingzhou,et al.Wind tunnel test on effect of the jet flow interaction on stage separation of launch vehicle[J].Journal of Experiments in Fluid Mechanics,2009,23(2):15-19.
[7] 罗金玲,何海波,徐敏,等.非对称飞行器级间分离时喷流干扰特性试验研究[J].实验流体力学,2008,22(4):15-18.Luo Jinling,He Haibo,Xu Min,et al.Experimental investigation on jet interference characteristics at stage separation of a non-symmetric vehicle[J].Journal of Experiments in Fluid Mechanics,2008,22(4):15-18.
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01
凤凰动漫(军事大王)(2022年1期)2022-04-19
组合机床与自动化加工技术(2022年2期)2022-03-04
军民两用技术与产品(2021年8期)2021-11-24
电脑报(2021年25期)2021-08-27
小哥白尼(野生动物)(2020年3期)2020-07-27
———重庆建成世界一流汽车风洞
汽车零部件(2019年7期)2019-08-16
北京理工大学学报(2019年1期)2019-02-22
数学大王·中高年级(2018年11期)2018-12-17
北京航空航天大学学报(2017年6期)2017-11-23
