
CRH3动车组半实物仿真测试台通信的设计与实现
2014-04-12 00:53黄根生赵红卫
铁道机车车辆 2014年2期
黄根生,赵红卫,王 欣,姚 放
(中国铁道科学研究院 机车车辆研究所,北京100081)
CRH3动车组半实物仿真测试台通信的设计与实现
黄根生,赵红卫,王 欣,姚 放
(中国铁道科学研究院 机车车辆研究所,北京100081)
根据CRH3型动车组的实车通信情况,以及半实物仿真测试平台对通信的需求,对实车上的通信设备进行分类,并提出真实设备与仿真设备的概念。并在此基础上,将半实物仿真测试平台上的通信归结为半实物仿真测试台的真实设备之间数据通信、仿真设备之间数据通信、真实设备与仿真设备之间的数据通信以及不同牵引单元间的数据通信。重点解决了仿真设备与真实设备之间的MVB通信、PLC通信,以及不同牵引单元间的以太网通信。
半实物仿真;MVB通信;PLC通信;以太网通信;仿真设备;真实设备
随着高速动车组在国内的广泛运用,高速动车组神经中枢的列车网络控制系统的研究也在不断地深入。由于列车网络控制系统控制和管理着列车上几乎所有子系统,这些子系统与列车网络控制系统之间有着十分复杂的网络通信协议,以及基于网络通信的复杂逻辑控制算法和故障诊断策略。要设计和实现如此复杂和庞大的控制系统,并确保安全可靠,无论是在设计和实现系统的网络通信协议和内部逻辑控制算法时,还是在列车运行后期维护中的故障诊断时,都迫切需要一个地面仿真测试平台,以便能够在列车网络控制系统的设计、开发、验证、维护的各个阶段,实现对列车的网络通信协议、逻辑控制算法、网络控制系统性能、故障诊断策略等方面的分析验证,降低实车运行带来的各种技术风险和成本风险。综合考虑地面仿真测试平台的灵活性、实用性和经济性,采用纯硬件平台和纯软件仿真平台相结合的半实物仿真的结构形式来搭建CRH3动车组半实物仿真测试平台。半实物仿真测试平台主要包括3大部分:车载电气柜(司机控制台)、采集系统和软件仿真系统。这3部分之间准确、实时、有效、可靠的信息交互是半实物仿真平台正常运行的基本要求。
1 CRH3动车组半实物仿真测试台
1.1 半实物仿真测试台结构
CRH3动车组半实物仿真测试平台主要用于更深入、方便地研究高速动车组列车网络控制系统的软件、硬件技术,以及为高速动车组在运行维护中的故障复现、分析和排查服务。其结构主要包括以下3部分:
车载电气柜:包含动车组上所有电气柜的电子电气控制电路,主要包括硬线电路、控制手柄、按钮开关、继电器、接触器、空气开关、熔断器以及TCN网络设备等。
采集系统(PLC开关柜):主要由PLC控制系统及DC 110 V驱动继电器组成,负责将整列车所有功能系统(例如牵引系统、制动系统、电源辅助系统等)与动车组车载电气柜(司机控制台)的硬件接口信号通过PLC系统将DC 110 V电平开关量信号转换为数字信号,为仿真软件提供接口;同时也将仿真软件发出的数字信号通过PLC系统控制驱动继电器转换为相应的DC 110 V电平开关量信号,最终控制CRH3车载电气柜中的继电器或者网络I/O设备实现整车的各个功能系统的监控功能。
软件仿真系统:硬件采用工业控制计算机及相应IO板卡,软件采用ControlBuilder(以下简称CB)仿真开发软件。通过软件仿真实现CRH3型动车组各个功能系统(牵引系统、制动系统、电源辅助系统、门控制系统、空调系统等)的功能模拟。该系统通过MVB网络与车载电气柜进行数据通信;通过以太网与采集系统的PLC主控制器进行数据通信。
半实物仿真测试平台的总体结构如图1所示。
1.2 半实物仿真测试台通信
在CRH3动车组上,设备与设备之间的通信方式主要有4种(WTB网络、MVB网络、CAN网络、硬线)。WTB网络主要用于不同牵引单元网关之间的通信;MVB网络主要用于同一牵引单元内不同MVB网络设备之间的通信;CAN总线主要用于制动控制器与制动控制单元之间的通信;硬线主要用于传统电子电气元件之间以及与其他设备之间的IO接口通信。在CRH3动车组半实物仿真测试台上,只有中央控制单元、人机界面、MVB中继器、MVB IO设备和传统电路设备以及司控台是真实存在的(称所有这些设备为真实设备);其他的所有设备都是通过一台工控机来模拟实现(称所有这些设备为仿真设备)。因此所有仿真设备之间的通信都可以通过软件来实现(包括MVB网络和硬线);真实设备之间的通信保持不变(包括WTB网络、MVB网络、硬线);真实设备与仿真设备之间的通信通过MVB网络、PLC通信和硬线来实现(包括MVB网络、硬线、CAN网络)。另外牵引单元之间的高压信息、中压信息、气路信息以及机械信息的交互通过以太网来实现。
从以上的描述中可以看出,从数据通信角度来看CRH3动车组半实物仿真测试台主要由3大部分组成:真实的TCN网络设备(如:中央控制单元、人机界面、MVB中继器、MVB IO设备等)、真实的电子电气设备(如:控制手柄、开关按钮、继电器、接触器、PLC工作站等)、仿真工控机(软件仿真各功能子系统的受控模型和控制器模型)。它们之间的通信结构如图2所示。

图1 CRH3动车组半实物仿真测试平台的总体结构图

图2 CRH3动车组半实物仿真测试平台通信结构示意图
2 半实物仿真测试台通信的设计与实现
在半实物仿真测试台中,除了中央控制单元、人机界面、MVB中继器、MVB IO设备以及硬线电路外,其他功能子系统都是通过软件仿真来实现的。由于在一台工控机上需要模拟多个设备,且这些设备与外界都有信息交换(包括MVB网络、CAN网络和硬线);因此需要解决的问题是如何实现仿真设备与真实设备之间的MVB通信和PLC通信。除此之外,不同牵引单元的仿真工控机之间的以太网通信也是需要解决的问题之一。
2.1 半实物仿真测试台中MVB通信的设计与实现
在半实物仿真测试台中,各个受控子系统的功能仿真采用CB仿真软件来实现,这些仿真子系统之间以及它们与真实设备(包括中央控制单元、人机界面、MVB中继器、MVB IO)之间均需要MVB网络通信,才能实现动车组中列车网络控制系统的各种功能。作为通用仿真软件的CB自身没有提供这样的接口,需要在CB软件的基础上进行2次开发来实现MVB通信。
2.1.1 MVB通信的设计
(1)综合NSDB文件
网络配置数据库(简称NSDB文件)是一个包含有网络设备进行网络通信所必须的所有配置信息的数据库,每个网络设备都有一个对应的NSDB文件。
在CRH3动车组上,每个子系统的控制器都有一块MVB通信网卡,同时需要为相应控制器加载一个对应的NSDB文件,才能进行正确的MVB数据通信。在半实物仿真测试平台中,为了优化平台的结构、方便各功能子系统的仿真、降低平台构建成本,仅用一台工控机来仿真多个受控子系统,并将包含有所有仿真设备的MVB通信配置信息的NSDB文件(综合NSDB文件)加载到仿真工控机上,从而实现所有仿真设备与所有真实设备之间的MVB通信。为此需要专门为所有仿真设备生成一个综合了多个仿真设备通信配置的综合NSDB文件,以供工控机仿真系统使用。
(2)XML文件
XML控制文件是一个包含有网络设备输入输出变量信息的综合文件,该控制文件用于将每个设备的输入输出变量导入到仿真程序中,方便仿真编程。如果设备是真实设备,则该设备的XML文件中包含该设备发送给其他所有仿真设备的信号;如果该设备是仿真设备,则该设备的XML文件中包含该设备发送给所有设备的信号。在半实物仿真测试台中,由于CB仿真程序是一个通用的仿真软件,不能直接将XML文件导入,因此需要开发一个中间转换工具来实现XML文件导入到CB仿真软件中,以便运用CB仿真软件进行仿真编程。
(3)MVB通信的结构设计
要实现半实物仿真测试平台中仿真设备与真实设备的MVB通信,MVB驱动必须解决两个结构设计的问题:一是CB仿真程序与MVB驱动之间的数据交换;另一个是MVB驱动与MVB网卡之间的数据交换。关于第1个问题,可以通过共享内存的方式来实现MVB驱动和CB仿真程序之间数据交换。其结构框图如图3所示。

图3 CB仿真程序与MVB驱动数据交换结构框图
关于第2个问题,可以在MVB网卡的底层硬件驱动的基础上进行软件开发来实现MVB驱动与MVB网卡之间的数据交换。其结构框图如图4所示。

图4 MVB驱动与MVB网卡数据交换结构框图
2.1.2 MVB通信的实现
MVB驱动的软件开发平台是基于Windows操作系统下的开发环境。在这种开发环境下,实现基于共享内存方式的多进程数据交互、PC104总线数据通信、基于TCP/IP协议的以太网通信、友好人机交互界面的常见方法有使用G语言的LABVIEW和使用C语言的Microsoft Visual C++。由于Microsoft Visual C++编程灵活,对程序开发者来说,具有很大的自由度,且在速度和稳定性方面具有较大优势,所以在方案设计上选择技术成熟的Microsoft Visual C++开发平台来实现MVB驱动的开发。MVB驱动程序作为一个进程,通过共享内存与CB仿真程序进行数据交换;同时MVB驱动程序通过PC104总线将数据发送给MVB网卡,或从MVB网卡接收数据。MVB驱动界面如图5所示。

图5 MVB驱动界面
(1)综合NSDB文件的解析
NSDB文件中包含了所有与网络通信相关的配置信息,包括设备地址、端口配置信息、变量配置信息、消息配置信息、宿时间监视信息以及版本信息等等。要使用NSDB文件,必须要分析它的组织结构。
NSDB文件是二进制文件。它是按照“段”的形式进行组织的,每个“段”都由相应的段标签、段长度和段内容组成。每个NSDB文件都有“NSDB_HEADER”段和“END_OF_NSDB”段,其他段的有无依据具体MVB设备的不同而不同。“NSDB_HEADER”段表示NSDB文件的开始;"END_OF_NSDB"段表示NSDB文件的结束。
(2)共享内存的管理与访问
MVB驱动和CB仿真程序是两个相互独立运行的程序。他们之间的通信是通过共享内存方式进行的。共享内存由CB仿真程序创建并由其进行管理。MVB驱动仅仅需要打开相应的共享内存并按照CB仿真软件所规定的机制进行访问即可。在MVB驱动中,使用CB仿真程序所产生的两个输入、输出文件确定需要通过MVB网络来进行数据传输的具体变量。访问共享内存的软件框图如图6所示。
(3)MVB数据的通信
在半实物仿真测试平台中,MVB数据的通信是指将CB仿真程序中的数据通过工控机上的MVB网卡发送到MVB网络,以及将MVB网络上的数据接收到CB仿真程序中。在CB仿真环境中,MVB驱动中的数据是通过共享内存与CB仿真程序进行交换的。
CB仿真环境下,MVB数据通信的软件框图如图7所示。

图6 访问共享内存的流程框图

图7 MVB数据通信的流程框图
2.2 半实物仿真测试台中以太网通信的设计与实现
在半实物仿真测试台上,动车组的某些电气连接电缆(如25 k V车顶高压电缆、440 V3 AC供电母线等)在电气控制柜中没有实现连接,这部分线路在CB仿真软件中利用仿真模型来实现。由于每个牵引单元对应一个CB仿真系统,在两个牵引单元之间连接的这些电缆线,如果直接利用实物电缆线进行连接,一方面较为困难,另一方面也会使仿真系统更为复杂。因此采用简单且传输速度快的以太网数据传输方式,在两台工控机(即两个CB仿真系统)之间传递这些硬线的连接信息。
通过以太网进行数据传输,用得最多最方便的就是客户端/服务器模型结构。为了使数据传输更加稳定、可靠,以太网传输程序采用TCP/IP协议。基于CB软件提供的共享内存接口,对其进行二次开发,实现两个CB仿真系统之间的以太网数据传输。以太网通信总体结构框图如图8所示。
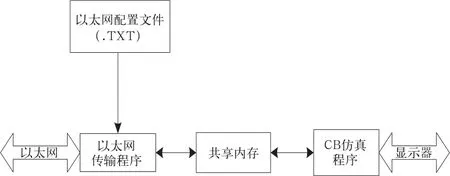
图8 以太网通信总体结构框图
2.3 半实物仿真测试台中PLC通信的设计与实现
在半实物仿真测试台中,车辆电气控制柜通过采集系统PLC开关电气柜连接到CB仿真系统中,在仿真系统和控制电气硬线之间的输入输出信号转换通过PLC工作站完成。每个PLC工作站都配有若干个数字输入输出模块,可以进行24 V和110 V数字量读入和置位,同时也可以根据实际需要进行模拟量输入输出的配置,多个PLC从站通过PROFIBUS DP主站/从站接口与PLC主站进行组态,PLC主站有一个以太网卡接口的模块CP343,可以通过以太网通信与CB仿真系统实现网络通信。
由于PLC与仿真系统之间的输入输出接口信号众多,如何方便、高效地在CB内部的仿真信号与PLC工作站上的输入输出通道之间建立对应关系是一个必须解决的问题。通过综合比较,最终采用了OPC通信方式。OPC通信的目的是为了使通信管理、通信信息处理系统等标准化,而无需处理特定协议的寻址问题,OPC客户应用程序可以通过一个标准、开放的接口,与OPC服务器进行通信,可以利用PLC提供的SIMATIC NET软件建立OPC服务器,由OPC服务器负责与PLC控制器通信,扮演“通信中心”的角色去读写PLC数据,CB仿真软件作为OPC客户端,直接通过控制器或者通过一个标准化的COM/DOM接口发送请求给OPC服务器。
在具体实现方法上,首先需要在仿真工控机上安装OPC服务器,并完成相应的配置,同时在CB仿真软件中完成仿真信号与PLC硬线信号对应关系的配置文件(根据硬件电路图确定),并启动OPC客户端服务,就可以实现仿真系统对电气柜的控制。整个OPC通信的结构如图9所示。

图9 OPC通信结构图
3 结束语
本文所描述的通信设计及实现方案全面考虑了CRH3动车组上所有的数据通信(包括网络和硬线),解决了CRH3动车组半实物仿真测试平台中单个牵引单元内真实设备与仿真设备之间可靠、正确、实时的数据通信;以及不同牵引单元内仿真设备之间的可靠、正确、实时的数据通信。为搭建CRH3动车组半实物仿真测试平台提供了有效、可靠、实时的通信保障。同时,也加快了高速动车组列车网络控制系统软件、硬件的国产化、自主化开发进程。
[1] [美]Jon Bates,Tim Tompkins著,何健辉,董方鹏译.实用Visual C++6.0教程[M].北京:清华大学出版社,2000.
[2] 李江全.西门子PLC通信与控制应用编程实例[M〛]北京:中国电力出版社,2012.
Communication Design and Implementation of Semi-physical Simulation Test Platform for CRH3EMU
HUANG Gensheng,ZHAO Hongwei,WANG Xin,YAO Fang
(Locomotive&Car Research Institute,China Academy of Railway Sciences,Beijing 100081,China)
According to the actual communication situation of CRH3EMU and the communica-tion requirements of semi-physical simulation test platform,all the communication devices of CRH3EMU are classified,and the concept of physical device and simulation device is proposed.Base on that,all the kinds of communication for semi-physical simulation test platform are divided into the data communication among physical devices,the data communication among simulation devices,the data communication between physical devices and simulation devices,and the data communication among different traction units.The MVB communication and PLC communication between physical devices and simulation devices,and the Ethernet communication among different traction units are solved mainly.
semi-physical simulation;MVB communication;PLC communication;Ethernet communication;simulation device;physical device
U260
A
10.3969/j.issn.1008-7842.2014.02.02
1008-7842(2014)02-0005-05
5—)男,助理研究员(
2014-02-17)
猜你喜欢
装备制造技术(2020年1期)2020-12-25
铁道通信信号(2020年12期)2020-03-29
商品与质量(2018年47期)2018-12-07
制造技术与机床(2018年11期)2018-11-23
铁道通信信号(2018年5期)2018-06-28
电子制作(2017年17期)2017-12-18
电子制作(2017年24期)2017-02-02
火控雷达技术(2016年2期)2016-02-06
中国交通信息化(2015年11期)2015-06-06
中国交通信息化(2014年12期)2014-06-05
