城市轨道交通列车辅助防撞系统方案研究
2014-04-07 08:01
城市轨道交通研究 2014年1期
(上海申通地铁集团有限公司技术中心,201103,上海∥高级工程师)
城市轨道交通列车辅助防撞系统方案研究
周巧莲
(上海申通地铁集团有限公司技术中心,201103,上海∥高级工程师)
城市轨道交通正常情况下的列车运行安全由ATP(列车自动防护)系统保障,ATP失效情况下的降级运行尚缺乏设备层面的安全保障。从技术方案、电气接口、系统定位、设备安装等方面介绍了列车辅助防撞系统。基于无线射频和声波探测技术的辅助防撞系统,在列车头、尾各设一套相同的设备,根据从列车接口电路获得的车辆状态信息,确定设备对应头尾端的不同工况和上、下行线路的不同模式,建立同一股道上后车前端和前车尾端的应答机制,实现前后列车相对距离的实时探测,为司机提供危险车距报警信息。
城市轨道交通;列车运行控制;运行安全;辅助防撞系统
Author's address Technical Center of Shanghai Shentong Metro Group,201103,Shanghai,China
城市轨道交通列车作为密集人群的流动载体,其运行安全受到高度重视。正常情况下,列车运行安全由安全性极高的ATP(列车自动防护)系统予以保障。然而,由于城市轨道交通系统高度复杂,实际运营中信号、车辆故障时有发生,ATP的故障导向安全设计,在大多数故障情况下导致列车停车。为使故障对运营的影响降至最低,往往采取切除ATP的人工驾驶方式,此时运行安全主要依赖于对降级运行规章的严格执行及驾驶员人工瞭望,缺乏设备层面的安全防护手段,存在风险。事实上,近年来国内外发生的列车撞车事故,大多数是在ATP切除运行时发生的。因此,研究一种独立于信号系统、在ATP切除情况下起作用的列车运行辅助防撞系统势在必行。
1 上海轨道交通ATP系统运用故障现状
导致列车必须在ATP切除情况下才能运行的故障主要是信号故障和车辆故障。信号系统故障牵涉面广,系统故障可能影响到全线所有车辆或某区段上运行的所有车辆。车辆故障和信号车载设备故障往往影响单列列车的ATP防护。据统计,2011年1~8月期间,上海轨道交通11条运营线路共发生ATP切除1387列次,平均每月发生184.9列次。其中,信号故障导致ATP切除次数占总次数的89.83%,车辆故障占总次数的6.42%。
信号系统故障导致区段或全线ATP防护失效,往往需要人工办理进路,通过控制防护区间及列车限速保障运行安全。单列列车ATP切除主要通过限制人工驾驶速度保障运行安全。上海已建成投运的轨道交通线路中,线路条件并不理想,存在不少小半径曲线的弯道(11条已投运线路中半径R≤400 m的小半径曲线共计422个);而司机瞭望的可视距离受弯道限制,弯道曲线半径越小,司机的可视距离越短。考虑到驾驶员需要一定的响应时间及列车速度必须控制在30 km/h以下,ATP切除后线路运营效率受到极大的限制。
2 列车辅助防撞技术方案
2.1 技术原理
受轨道交通线路形态如小半径曲线弯道、隧道等限制,在其它领域(如航空、汽车等)成熟应用的技术无法直接适用于轨道交通。例如,卫星定位(Satellite-based Positioning)技术可以在地面高架区段上应用,但无法适用于隧道区段,且定位精度也不足以区分列车上、下行股道;车载防撞雷达(Anti-Crash Radar)无法在小半径曲线弯道、上下坡道等事故重点防范区段有效发挥作用。此外,基于图像识别和机器视觉等分布式传感监测网络技术目前还不成熟。
基于声学和射频探测技术,通过建立前、后车车载设备问讯应答实时探测前后列车的相对距离的辅助防撞系统,能够适应轨道交通高架、隧道、小半径曲线弯道等复杂的运行条件,有效解决非正常运行条件下(ATP切除)行车安全保障系统缺失的问题。其技术原理如图1所示。前、后列车通过声学和射频信号的发送接收,建立应答机制并实时计算前、后车距离。

图1 列车辅助防撞系统技术原理示意图
列车辅助防撞系统的主要工作步骤为:
(1)后车的信号发射装置向前车发射问询信号。
(2)前车信号接收装置接收信号,进行数据解调,若符合预定通信协议,通过信号发射装置向后车反向发射应答信号;若数据不符合通信协议,则视为干扰,不进行响应。
(3)后车信号接收装置收到前车发射的应答信号。
(4)后车的信号处理装置通过分析前车应答信号判断前车位置、相对车速等车况。通过计算发送问询信号至收到前车应答信号的时间差Δt,确定前车位置;通过S=vΔt/2估算前、后车之间的相对距离(其中v为信号传输速度,Δt为信号传输时间)。
(5)后车司机室内的人机界面显示前车距离,并提供危险车距报警,提醒司机及时采取措施。
该辅助防撞系统采用应答式工作方式,前车主动发射应答信号,测距信号较强,系统环境适应性好。通过抗干扰技术处理手段,解决系统复杂环境下的多径干扰等问题,提高了系统的可靠性。无线系统采用1.5 G频段信号,避免与CBTC(基于无线通信的列车控制)制式的信号系统产生干扰。声系统采用6~8 k Hz的声波,属机械波,与电磁波彼此不干扰。
经过前期列车运行环境调查及传输性能测试,无线波及声波都能实现近距离测距功能,测量距离可达350 m以上,满足ATP切除、限速60km/h运行的列车制动距离要求。无线波和声波都可作为辅助防撞系统的信号源,距离计算公式中的信号传输速度(v)分别采用对应的无线波传播速度和声波传播速度。
2.2 系统构成
列车辅助防撞系统架构如图2所示。列车头、尾两端各设一套独立的设备,两套设备完全相同。每套设备由车内、车外设备组成。车外设备包括信号发送装置、信号接收装置、辅助传感模块等,主要用于信号的发送和接受。车内设备包括系统主机、电源、系统车辆接口、示警终端、自检和故障诊断模块等,用于信号处理和示警信息的显示。
2.3 系统功能
(1)实时测距:系统通过车辆接口判断ATP处于故障切除状态时,通过车载信号收发设备实时测量本车与前车之间的距离。对于列车辅助防撞系统来说,探测到不同的前、后车距离(D),应采取不同的处置措施。其主要的阈值划分为:
①当D>350 m时,即车距大于最高车速(80 km/h)时的紧急制动距离,列车辅助防撞系统应提供最低级示警,提醒司机采取减速措施;
②当200 m<D≤350 m时,车距大于车速60 km/h时的紧急制动距离,列车辅助防撞系统提供中级示警,提示司机采取安全措施,实施制动;

图2 列车辅助防撞系统构架图
③当0<D≤200 m时,即危险车距范围,列车辅助防撞系统应提供最高级示警,提示司机进行紧急制动,甚至系统直接发出列车紧急制动请求。
(2)危险车距评估及示警:系统通过实时测量到的前后列车距离,参照相应的危险车距评估阈值,评估追尾风险,向司机输出不同的示警信息;车距危险时,向列车控制系统输出紧急制动请求,可通过列车紧急制动回路使列车施加紧急制动。
(3)工作模式区分和识别:系统通过车辆接口识别当前列车的上、下行模式,并根据不同模式发送不同编码或频段的测距信号,使上、下行列车能相互区分;同时考虑特殊线路形式(始发站、折返区段或存车线等),通过地面设备进行设定或校验。
(4)头尾端设备识别:处于列车运行方向头端的设备为主动问讯设备,尾端设备为被动应答设备。系统设备通过车辆接口信号自动判别设备处于头端还是尾端,从而使其工作状态处于相应的工况。
(5)系统自检和故障诊断:系统可对收发装置进行在线诊断,并对系统工作状态、故障信息、报警信息等进行记录。
3 电气接口
辅助防撞系统通过与车辆接口获得必要的信息,提高系统的可用性。上海轨道交通网络既有列车400多列,系统方案要兼顾既有列车及新购置列车的应用情况。其电气接口方案如图3所示。图中,F为短路保护空气开关;cab1为列车1位端司机室受控信号,1位端主控制钥匙打开,cab1=1;cab2为列车2位端司机室受控信号,2位端主控制钥匙打开,cab2=1;列车受控为列车受控信号,列车蓄电池开关打开,列车受控=1;ATP切除为受控司机室ATP切除信号,列车线信号,ATP切除=1;K1、K2为安全型紧急制动请求输出继电器,紧急制动有效,K1、K2断电;应答信号为紧急制动输出驱动的紧急制动中间继电器的应答信号。

图3 车辆与声/无线系统接口示意图
3.1 系统电源
系统采用DC 110 V电源,由列车蓄电池供电。为保证因故迫停区间的故障列车具备被动应答功能,并可被后续列车探测到,系统电源直接取自车辆蓄电池输出端,不受任何控制开关或电池输出欠压保护控制。只要电池电压达到系统工作电压,即能保证系统的正常应答功能。同时,为保证系统短路故障不影响列车辅助供电功能,系统电源设空气开关保护。
3.2 列车受控、司机室受控信号
为区分列车上、下行模式,排除非本股道列车的干扰,辅助防撞系统通过不同的工作模式(上行、下行、特殊)区分系统所在的列车是运行于上行线、下行线还是特殊区段(折返区段、存车线、库内等),并在不同的工作模式下采用不同编码或频率的信号。
列车出库进入正线后,列车运行于上行线还是下行线与受控司机室之间有着一一对应关系。因此,辅助防撞系统可根据主控制器钥匙开关输出信号确定工作模式。两端司机室对应的辅助防撞系统可根据相关信号判别自身是车头设备还是车尾设备,从而决定其工作状态。如设定1位端司机室作为前行方向司机室时列车处于上行,则列车两端设备的工作模式判断逻辑如表1和表2所示。
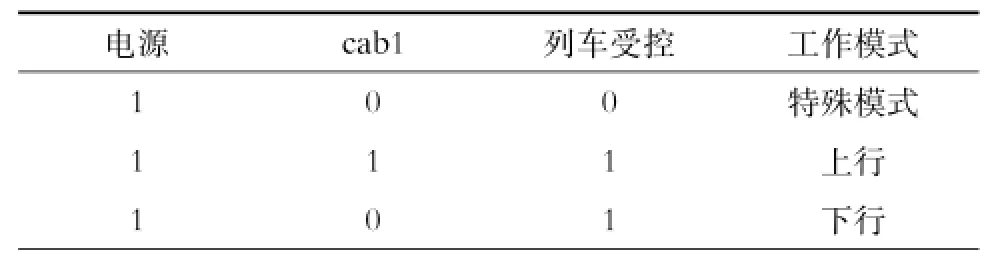
表1 1位端司机室设备工作模式

表2 2位端司机室设备工作模式
3.3 ATP切除信号接口
列车在ATP未切除时,运行安全由ATP系统保障。为防止辅助防撞系统在ATP未切除情况下对司机的不必要干扰,其报警输出功能只有在ATP切除的情况下才能启动。因此,辅助防撞系统需接入ATP切除信号接口以获取ATP切除信息。列车两端设备的工况判断逻辑如表3和表4。
辅助防撞系统设备根据ATP切除开关的状态信号和受控司机室信号决定自身的工作工况。防撞系统设备电源由列车蓄电池供电,为永久负载。处于尾端的设备,无论ATP是否切除,均处于被动应答状态。而列车前端设备,无论ATP是否切除,均处于主动问询状态并完成测距功能,只是为了不对驾驶员产生干扰,报警输出被系统自动禁止。
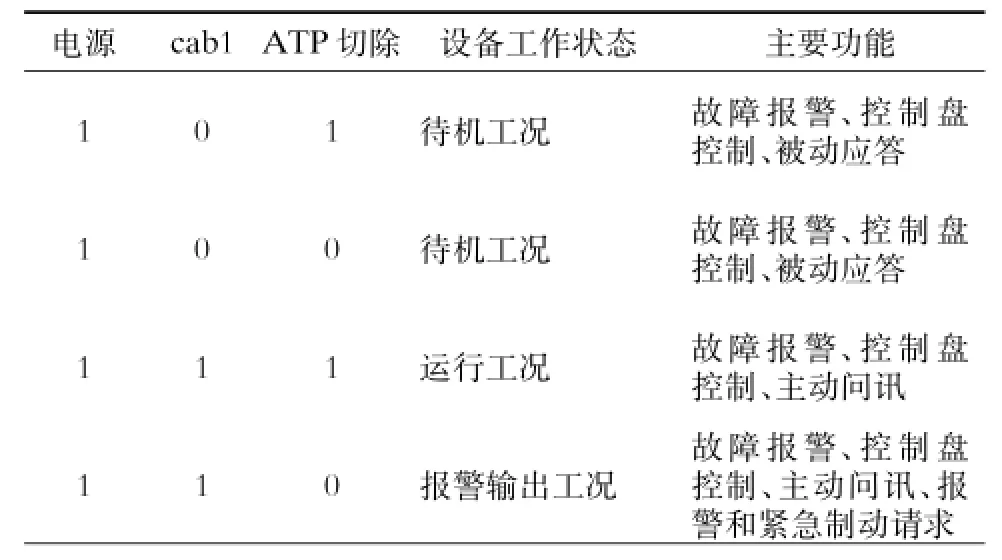
表3 1位端司机室设备工作工况与输入信号关系

表4 2位端司机室设备工作工况与输入信号关系
3.4 紧急制动请求输出
辅助防撞系统在ATP切除情况下探测到危险车距时可输出紧急制动请求,并通过列车紧急制动回路使列车紧急制动。紧急制动应具备较高安全等级,应采用安全型继电器输出,设计遵循故障导向安全原则(即继电器失电,紧急制动有效)。同时,防撞系统紧急制动请求为2路安全型输出信号,以备冗余,并对继电器状态进行监控。
3.5 列车串行接口
该接口用于与列车控制网络的通信,如时钟同步信息、故障信息等,有利于故障及事故分析。辅助防撞系统在既有列车中应用时,此功能实现较困难。
3.6 显示接口
该接口用于与辅助防撞系统的报警终端通信,显示自检、故障等相关信息,并提供危险车距报警。
4 系统定位
轨道交通列车运行安全由ATP系统保障。本系统作为辅助安全保障系统,仅在ATP系统不可用的情况下做补充。防撞系统通过车辆接口获得ATP是否切除的信号,控制系统的工作状态,防止与ATP系统产生干扰。另外,ATP切除以后,即使辅助防撞系统提供辅助安全保障,但终属降级运行模式,列车的最高运行速度有必要做适当的限制,如由运营规则限定最高运行速度为60 km/h或50 km/h。通常情况下辅助防撞系统适用于以下三种情况:
(1)线路级ATP系统失效:ATP系统级故障,整条线路上所有列车ATP均不可用,列车通过ATP切除开关切除ATP,辅助防撞系统受ATP切除开关控制启动,进入主动问询、应答、测距和报警模式。
(2)线路局部区域ATP失效:ATP局部区域故障,导致所有列车通过局部区段时ATP不可用,运行于故障区域的列车通过ATP切除开关切除ATP,辅助防撞系统受ATP切除开关控制启动,进入主动问询、应答、测距和报警模式。
(3)单列车ATP失效:ATP车载设备故障,或某些车辆设备故障,导致单列车ATP切除,此时前车ATP正常使用,前车尾端设备处于被动应答状态,一旦其检测到后车发送的问询信号,即与后车前端建立应答关系,后车根据前车尾端的应答信号进行测距,并提供危险车距的报警。
5 设备安装
声辅助防撞系统和无线辅助防撞系统均包含收发设备、处理主机和显示终端等三部分设备。无线系统的收发天线和处理主机设于司机室天花板内,显示终端设于驾驶台左侧的逃生门门柱上。声防撞系统的声波信号受玻璃影响较大,设于列车前端自动车钩和防爬装置的中间,且外形设计不应影响车钩的摆动角度,声系统主机安装于端车客室座位上方的天花板内,显示终端安装位置与无线系统相同。图4为显示终端,图5为声系统收发设备。
6 结语
在城市轨道交通单列车ATP失效、轨旁局部区段ATP失效、区域控制中心失效等情况所导致的ATP切除降级运行模式下,列车辅助防撞系统不依靠信号、通信等其他系统,独立实现前、后列车追踪预警甚至紧急制动施加,为无ATP防护的人工驾驶提供设备层面的辅助安全保障,提高了城市轨道交通非正常情况下运行的安全性,改善了运营服务质量,提高了运营效率,避免或减轻了全路网大面积拥堵或瘫痪,具有明显的社会效益和经济效益。

图4 显示终端

图5 声系统收发设备
[1] 何晓薇.空中交通警戒与防撞系统的主要技术特点[J].中国民航飞行学院学报,2001,12(3):40.
[2] 余成波,万文略,郑有根,等.汽车激光雷达自动防撞微机控制系统的研制[J].仪器仪表学报,2001,22(4):428.
[3] 周庆灏,李素莹.上海轨道交通1号线“12·22”列车侧面冲撞事故分析与反思[J].城市轨道交通研究,2012(7):7.
On the Plan of Train Auxiliary Anti-crash System for Urban Rail Transit
Zhou Qiaolian
Under normal circumstances,the safety of metro train operation is guaranteed by the automatic train protection system(ATP),but when ATP system becomes ineffective,the train operation under degraded mode will need the safety guarantee at equipment level.The auxiliary anti-crash system,based on radio-frequency and sound-wave detection technologies,consists of the same set of equipment on each end of a train.In accordance with the train status information obtained from the train interface circuit,each set of this equipment will determine the working condition of the corresponding train head/end,as well as the operation mode corresponding to the northbound/southbound track. In this way,the response mechanism between the end of the front train and the head of the back train on the same track is established.The relative distance between the front and the back trains can be measured on a real-time basis and alarms can be sent to the driver immediately upon reaching the dangerous train distance.
urban mass transit;train operating control;running safety;auxiliary anti-crash system
U 298.1
2013-08-06)
猜你喜欢
机械工业标准化与质量(2022年3期)2022-08-12
汽车实用技术(2022年4期)2022-03-07
装备制造技术(2020年3期)2020-12-25
小哥白尼(趣味科学)(2018年12期)2018-12-18
莫愁·时代人物(2018年7期)2018-09-12
莫愁(2018年20期)2018-07-19
汽车工程师(2018年1期)2018-07-13
中国公路(2017年13期)2017-02-06
智能建筑电气技术(2015年5期)2015-12-10
民用飞机设计与研究(2015年3期)2015-12-07