
基站信息采集仪中GPS模块干扰问题的解决
2014-04-03 02:24
自动化仪表 2014年7期
(重庆邮电大学通信网与测试技术重点实验室1,重庆 400065;重庆重邮汇测通信技术有限公司2,重庆 401121)
0 引言
移动基站综合信息采集仪是一体式的天线工程参数测试仪表,能够对基站工程参数进行快速采集,提高采集效率。采集仪中内置了GPS接收模块,能够帮助测试人员在第一时间明确基站位置。GPS数据精度有如下要求:定位经纬度的精度为±10 m;空旷区域首次搜星时间至少小于60 s;系统休眠时唤醒搜星定位时间至少小于10 s。
GPS属于高精度的导航系统,理论上将GPS模块引入移动基站综合信息采集仪能够实现定位的功能。由于GPS卫星的信号发射功率较小,到达地面后信号更为微弱,而采集仪分发电路复杂,会给GPS接收模块带来干扰,使得GPS模块不能达到要求的精度甚至不能定位[1]。
本文对手持式移动基站信息采集仪GPS信号易被干扰的问题进行了分析,并找到了改进的方案。经测试,该方案效果良好。
1 干扰分析
1.1 基站信息采集仪系统
GPS应用系统由基站采集终端模块和GPS接收处理模块两大部分组成,这两个模块之间利用串口机制进行信息的交互。GPS模块接收GPS卫星信息,并将数据实时发送至基站采集终端[3]。其结构图如图1所示。
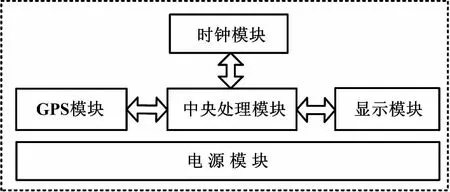
图1 基于基站采集系统终端GPS模块设计图
图1中,GPS模块获取的数据将由串口函数实现,数据进入串口中断,读取数据后向上层发送任务消息,此时中央处理模块进行串口初始化,初始化成功后得到串口文件描述符nFdGpS,判断该数据是否大于0。若大于0,则设置串口各个参数并循环读取GPS数据。
1.2 GPS接收机接收信号原理
GPS信号利用2个载波频率(L1和L2)完成调制发射导航信号[2]。L1为1 575.42 MHz,L1利用了正交的方式分别调制了P(Y)码和C/A码;L2为1 227.60 MHz,目前只调制了P(Y)码。P码信号不仅定位精度高,而且保密性好。由于GPS卫星的信号发射功率不可能很大,卫星距地面又远(20 200 km),信号到达地面时己经很弱。因此,GPS用户接收机很容易受外界干扰[4]。
1.3 基带时钟信号的干扰
在大多数数字系统中,电磁干扰的主要来源来自时钟电路。时钟源可以通过两种方式产生电磁干扰,同步时钟的重复特性以及没有正确端接的线路都会产生电磁干扰。在高速数字系统中,固定频率的时钟是主要的电磁干扰源。时钟信号会影响其他设备正常工作,例如很多同步设备使用的典型频率为33.3 MHz,这个频率常用作PCI总线、ASIC、FPGA以及处理器的时钟信号源。与33.3 MHz有关的是一系列谐波频率,33.3 MHz的3次谐波即为99.9 MHz,因此一块工作频率为33 MHz的电路板可能使调谐99.90 MHz的收音机不能正常接收[5]。
GPS接收模块是通过接收卫星信号,进行定位或者导航的终端。接收信号就必须用到天线。 GPS卫星信号分为L1和L2,频率分别为1 575.42 MHz和1 228 MHz。L1为开放的民用信号,信号为圆形极化。该频率易受时钟信号的高次谐波干扰。
基站采集手持终端核心中央处理模块电路如图2所示。

图2 RC低通滤波器电路图
从基带主芯片时钟信号出来的时钟信号进入核心模块。这条链路富含时钟信号频率的各个高次谐波分量,时钟信号的频率标准值为100 MHz。实际上,时钟信号并不稳定,通过示波器观察可知其频率在95~105 MHz之间跳动。这就会导致GPS在其所在频段内被干扰。在GPS频段范围内包括较多高次谐波分量,所在频点主要在1 575.42 MHz频率附近,时钟信号传输链路上携带有大量的基带时钟信号的高次谐波分量,造成高次谐波干扰[5]。具体参数如下。
时钟频率为98.9 MHz时,对应其第16次高次谐波,频率为1 575.42 MHz;时钟频率为105.028 MHz时,对应其第15次高次谐波,频率为1 575.42 MHz。
1.4 分发电路的电磁波干扰
在电器、电子设备等应用产品中,电磁波无所不在,电磁波对于这些电子设备而言是潜在的干扰源[6]。干扰是电磁波造成的,而电磁波是由于带电粒子在电场中移动产生的,只要存在电信号就一定会产生电磁波。在高速电路以及其他系统设计中,高频信号线、集成电路的引脚、各种接插件等都是潜在的辐射干扰源。在实际工作中,因为两个设备之间发生干扰通常包含着许多途径的耦合而产生共同干扰,使得电磁干扰很难被控制。在大多数数字系统中,电磁干扰的主要来源是时钟信号以及其他功能模块电路,统称为分发电路干扰。
上述手持式基站信息采集测试终端在GPS模块就出现了被干扰的情况[6]。由于中央处理模块以及其他模块发射电磁波的干扰,使得GPS模块无法快速搜星并达到3D定位。经研究,本文提出两种简单有效并且可以并行的机制,用以降低磁波干扰并缩短搜星时间。经测试,该方案不仅顺利达到消除电磁干扰的目的,并且廉价易行,极大地降低了开发成本。
2 抗干扰方案设计
2.1 降低电磁波干扰的方案
降低数字产品的电磁波干扰有几种常规方法,第一种是加上屏蔽的方式。该方式并不是改变电路的结构,而是一种在机械结构上的解决方案,利用金属材质的封装,将整体结构封闭在产品内部,防止干扰电磁场向外扩散。这种解决方法常用于对抗电磁干扰,但是通常会大幅增加产品制造成本,而且对于发热量比较大的电路系统,加上屏蔽盒会影响散热,没有良好的散热。这对产品来说是非常致命的,过热甚至会损伤器件或系统。第二种即为滤波和降低功率等手段,其原理即为找出散发电磁干扰的干扰源,将其隔离[7]。若测试出超出辐射规定的特定电波频率,则锁定这个频率或谐波频率,即可判别出是哪条电路造成的电磁波辐射。
上述两种常规方法中,第一种方法比较常用且效果较好,但是由于基站信息采集终端模块化设计理念的存在,无法在集成设计的核心板上加上屏蔽结构,屏蔽盒的安装是一个新的难题;第二种方法即本文采取的利用电容滤波性能去除时钟信号高次谐波干扰的方法,原理简单且成本较低。针对分发电路产生的电磁波干扰也可能会干扰GPS模块接收信号的强度,本文提出第三种较为简单且实用成本低的方法来降低电磁波干扰,即利用软件控制使得中央处理模块休眠,降低电信号强度,从而降低电磁波干扰。
2.2 电容滤波降低电磁干扰
2.2.1 电容滤波特性
在电路板中,电容可以用于控制电磁干扰。对于一个电容而言,电容容抗随频率的增加而降低[4],利用这个特点,可以把混杂在直流电里的交流成分过滤出来,叫做“滤波”。经过滤波,交流成分都经过电容器回到电源,电容器两侧剩下的就是没有波动的纯直流电。利用同样的原理,可以通过电容器筛选出交流信号,把直流成分去掉,这一作用被称为“耦合”。把电容并联在负载两侧,交流电源同时也在给电容充电,充满后电容对负载放电,可以提供额外的电平,补上正弦波的单调递减部分,使波形的相对波动小一些[8]。
2.2.2 利用电容降低谐波干扰
经过频谱分析仪检测,SDRAM的数据线、地址线、时钟信号、5个片选、读出使能等干扰都比较强,其中时钟信号特别强。为解决上述问题,本文采用了RC低通滤波器来去除时钟信号的干扰。在时钟信号发生器和信号接收电路之间并联一个电容,使得低频段的基带时钟信号可正常通过,而高频段的干扰信号被直接阻隔掉,可明显降低对中央处理模块接收GPS信号的干扰[9]。RC滤波器等效电路如图3所示。

图3 RC滤波器等效电路图
令Uo为输出电压,Ui为输入电压,用符号Au来表示传递函数,这里的Au为复数,即:
(1)

(2)

(3)
(4)

(5)
利用对数传输单位,可将低通滤波器的幅频特性写成:
(6)
2.3 利用休眠降低电磁干扰
GPS精确的定位时间和所处的环境有关,若处于晴天且空旷的地方,定位比较快。GPS芯片要求冷启动时间为42 s,考虑天气等其他因素,设定标准休眠时间为60 s,即1 min能确保GPS能够达到3D定位。每次搜星时,按下特定按键使主板进入休眠。在此期间降低CPU及其他部件的功耗,而GPS模块搜星定位继续工作,从而去除因主板工作携带的电磁干扰。
虽然利用RC低通滤波去除了因为时钟信号不稳定造成的脉冲信号对GPS接收造成高次谐波干扰,但是还存在主板其他电路产生的电磁波对GPS接收的干扰。为解决上述问题,通过尝试主动复位的办法,采用外部条件对中央处理模块进行复位唤醒。当中央处理模块进入休眠状态时,整个系统除GPS模块外均处于掉电模式。此模式下CPU定时器、其他模块包括串行口均停止工作,且时钟信号处于稳定的状态,不再左右波动。这能够去除时钟波动时其余频率带来的高次谐波干扰,更重要的是能够去除其余电路的电磁波干扰。这里值得一提的是,利用核心处理模块休眠最主要的作用是缩短搜星时间,提高搜星效果,即在60 s以内核心处理模块休眠不仅能够达到3D定位,并且能够搜到更多的卫星。搜到卫星颗数越多,就越能够提高GPS定位的精度[10-11]。
3 抗干扰效果验证
3.1 GPS信号强度的比较
在时钟信号发生器和信号接收电路之间串联一个电容。该方式提高了搜星性能,缩短了搜星时间,并且增强了接收到的GPS信号强度,对于系统整体性能有了一定的提升。
本文利用麦哲伦手持GPS型号为explorist500的专业GPS测试终端搜星定位作为搜星效果的参照物。测试结果证明在同一地点,相同时间麦哲伦手持GPS能够定位到9~11颗卫星。相同情况下的多种测试结果对比结果如表1所示。表1中,斜线前方数据代表未加电容过滤高次谐波,斜线后方代表加电容过滤高次谐波。从表1可以看出,加电容后搜星颗数与参照设备麦哲伦手持GPS搜到的卫星颗数基本一致,证明增加电容滤波模块后基站工程参数手持采集终端能够定位到的卫星颗数与麦哲伦手持GPS定位到卫星的数目一致,说明串联的RC低通滤波器降低了高次谐波干扰,有效增强了GPS信号强度。

表1 加入RC滤波器前/后搜星颗数对比
3.2 搜星时间的测试
通过实践证明,采用屏蔽主板电磁干扰,即利用软件使主板在GPS中工作时休眠,可有效缩短从开机到3D定位的搜星时间。2012年10月22日,在重庆市某基站测试终端测试所得到的在处理器模块不休眠时设备搜星时间结果如表2所示。表2中,设备1、设备2、设备3和设备4在同一地点测试10次搜星时间均在60 s以上,最长时间可达154 s,最短时间也需要65 s。设备平均搜星时间为90 s左右。

表2 实地测试搜星时间表
加入休眠模块后,测试方法为重启终端后按下复位键并计时,60 s后点亮屏幕,查看是否搜到卫星并达到3D定位,结果如表3所示。表3中,●代表60 s内达到3D定位,○表示60 s内未达到3D定位。从表3可以看出,使用主板休眠后,设备能在60 s内搜到卫星,达到3D定位的概率为80%。
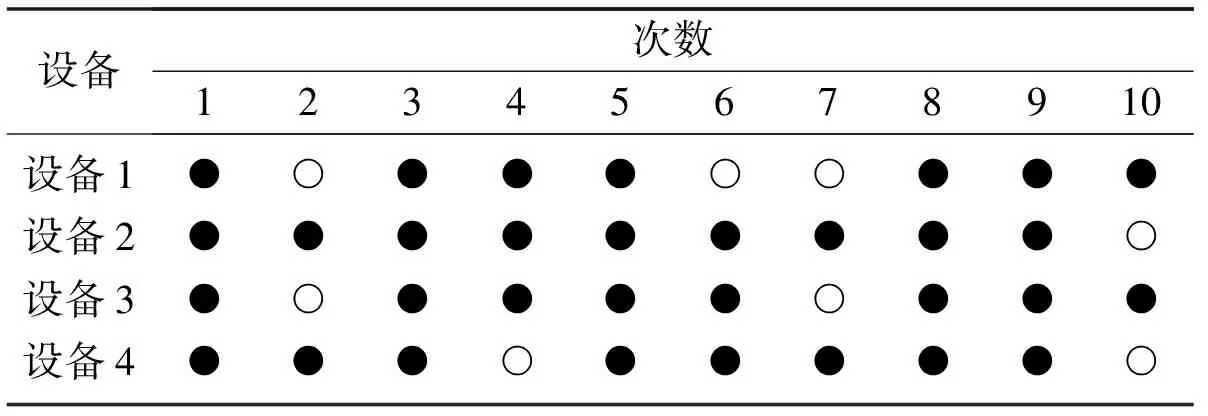
表3 实地测试搜星效果表
4 结束语
本文主要介绍了在实践中将GPS模块应用于手持终端时抗电磁波干扰问题,并提出了两种抗干扰的方法。其一为串联RC低通滤波器降低基带时钟信号高次谐波干扰;其二为保持GPS模块处于正常工作状态,同时利用休眠处理器模块降低其余分发电路的电磁波干扰。这两种方法同时使用效果更佳,能够保证手持终端在基站附近在正常情况下60 s内达到3D定位。
经过实际验证,本文方案不仅效果显著,并且成本低廉,对于实际中抗电磁波的操作有重要的参考价值。
[1] Kaplan E.GPS原理与应用[M].邱致和,王万义,译.北京:电子工业出版社,2002:28-125.
[2] 刘海波,吴德伟,董成喜,等.GPS抗干扰技术发展趋势[J].火力与指挥控制,2011,36(1):1-4.
[3] 卜爱国,陈艳,刘昊.GPS信息在手持终端设备上的应用实现[J].电子器件,2003,26(2):211-213.
[4] 丁金军.GPS干扰与抗干扰技术发展现状分析[J].硅谷,2012(8):13-14.
[5] 马丹,赵晨飞.一种降低基带时钟信号高次谐波干扰的电路:中华人民共和国国家知识产权局,200820092338.4[P].2008-
12-07.
[6] 邢琦峰.开关电容滤波器的设计与应用研究[J].电脑知识与技术,2011(7):1669-1679.
[7] 周颖,邹斌,郝冰,等一种简易GPS压制式高斯白噪声窄带干扰机设计[J].航天电子对抗,2005,21(6):15-18.
[8] Mairesse Y,Bohan A,Frasinski L J.et al.Optimization of attosecond pulse generation[J].Physical Review Letters,2004,33(3):1-4.
[9] 王勇,卢中华.窄带LC带通滤波器的设计与实现[J].舰船电子对抗,2011,34(4):115-117.
[10]吴清荣,丁跃军.PIC单片机低功耗设计[J].制造业自动化,2011,93(16):140-142.
[11]李临生,魏德华,柳旭英.单片机休眠—复位运行方式提高抗干扰能力[J].技术纵横,2004(4):33-35.
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
数学小灵通·3-4年级(2021年9期)2021-10-12
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
小学生学习指导(低年级)(2020年10期)2020-11-09
电子制作(2018年18期)2018-11-14
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
电子制作(2018年9期)2018-08-04
数学大王·中高年级(2017年2期)2017-02-08
