
模糊算法在氯化釜温度控制中的应用
2014-04-03 02:24
自动化仪表 2014年7期
(中国科学院自动化研究所1,北京 100190;中国科学院大学2,北京 100190)
0 引言
氯化聚乙烯(chlorinated polyethylene,CPE)广泛应用于塑料、橡胶、建材、医药、农业等众多领域。因其自身化学结构,CPE具有众多优良特性,能很好地提高材料性能。它与其他材料共同使用,可显著提高其他材料的诸多特性[1]。本文研究的对象所采用的CPE生产方法为水相悬浮法。
氯化反应是CPE生产的关键,是一个复杂的放热反应。氯化釜作为氯化反应的主要设备,热容量大、纯滞后时间长,其传热系数会随着反应的进行而发生变化[2]。加之温度本身具有滞后性和非线性[3],采用传统的PID控制方法不能满足控制要求。在分析氯化釜温度特性的基础上,提出了采用模糊控制器对温度进行控制的方法。在Simatic PCS7[4]系统中,利用CFC、SFC、SCL等编程工具完成了模糊控制器功能块的编写及其与其他功能块的互连,并基于S7- 400H构成温度控制的DCS系统。该系统能够有效地解决温度的超调与振荡、因现场水压不稳等突发干扰带来的问题,显著提高了CPE的产品质量。
1 工艺概述
氯化反应的主要设备为氯化釜,其结构示意图如图1所示。夹套内部载热体为冷水与蒸汽的混合流体,通过调节冷水阀门和蒸汽阀门开度实现对釜内物料的升温或冷却。为避免冷水倒吸入蒸汽管道,调节过程中蒸汽阀门和冷水阀门不能同时打开。反应过程中,通过氯化釜底部的液氯阀门将液氯通入氯化釜中,作为反应物之一进行生产。

图1 氯化釜结构示意图
氯化反应分为升温、恒温、降温3个阶段。工艺上对降温阶段的温度变化要求不高(手动操作即可),本文只对升温和恒温阶段进行控制。根据工艺要求,将这两个阶段的温度随液氯累计量的变化关系分为5段,具体如表1所示。

表1 工艺要求
表1中,每个阶段与相邻阶段的温度节点对于氯化反应质量至关重要,在控制过程中主要针对温度节点处的温度与液氯累积量的匹配程度进行测试。
2 控制器设计与实现
在系统设计中,需分别控制温度和液氯流量。使用传统的PID算法对液氯流量进行控制,便能够达到满意的控制效果,保证液氯流量的恒定。本文只针对温度控制做详细说明。
由于温度的滞后特性,采用传统的PID控制方法会导致温度产生较大波动,本文采用模糊控制器解决温度的滞后性问题。模糊控制器由模糊化、模糊规则库、模糊推理、解模糊这4部分组成。其中,模糊控制规则需要根据现场操作人员长期积累的经验制定。氯化釜温度控制系统框图如图2所示。为保证釜温与液氯累积量按工艺要求变化,更加充分地利用反应过程中释放的热量,将任意时刻的温度设定值设置为随液氯流量呈先快后慢趋势增长时刻的值。

图2 氯化釜温度控制系统方框图
本文采用二维模糊控制器对氯化釜温度进行控制,根据偏差e(单位为K)、偏差变化ec(单位为K)以及模糊规则输出相应的控制量。e(k)=r(k)-y(k),其中,r(k)为温度设定值,y(k)为温度测量值,ec(k)=e(k)-e(k-1)。根据现场实际生产状况,偏差e的变化范围选择为[-30,30],将其量化等级选择为14级,模糊子集E的论域为E={-6,-5,-4,-3,-2,-1,-0,+0,1,2,3,4,5,6},对应的量化因子为:
(1)
偏差变化ec的范围选择为[-3,3],将其量化等级选择为13级,模糊子集EC的论域为EC={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},量化因子为:
(2)
对任意偏差ei进行量化时,按以下3条原则处理。
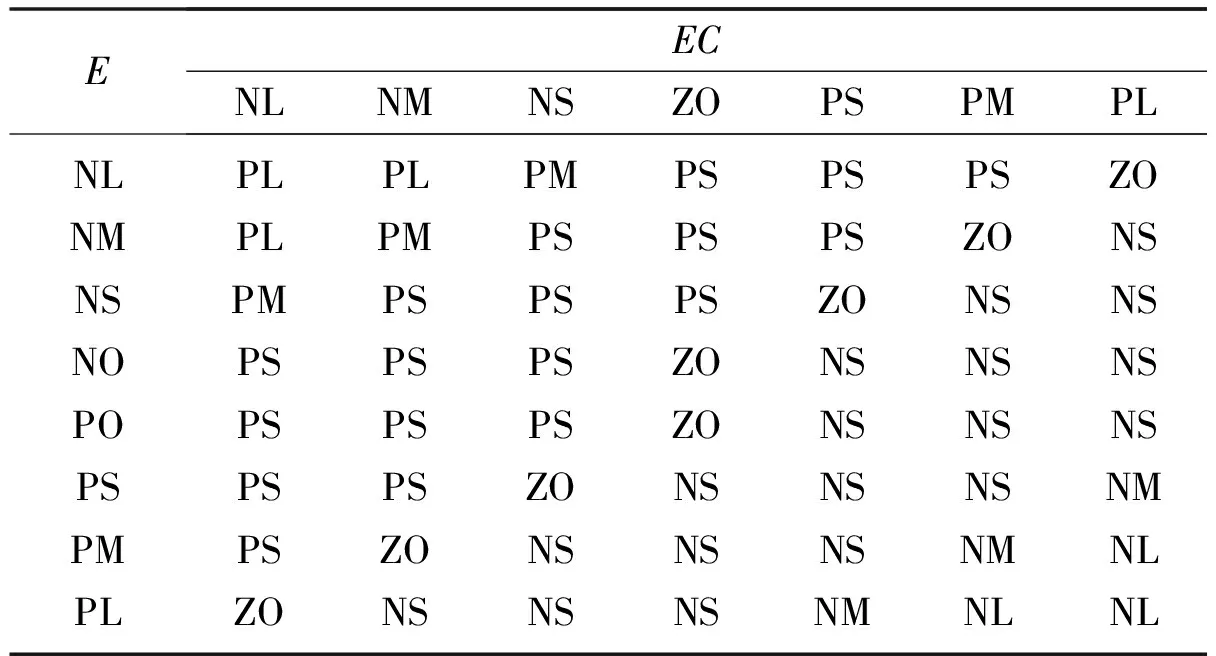
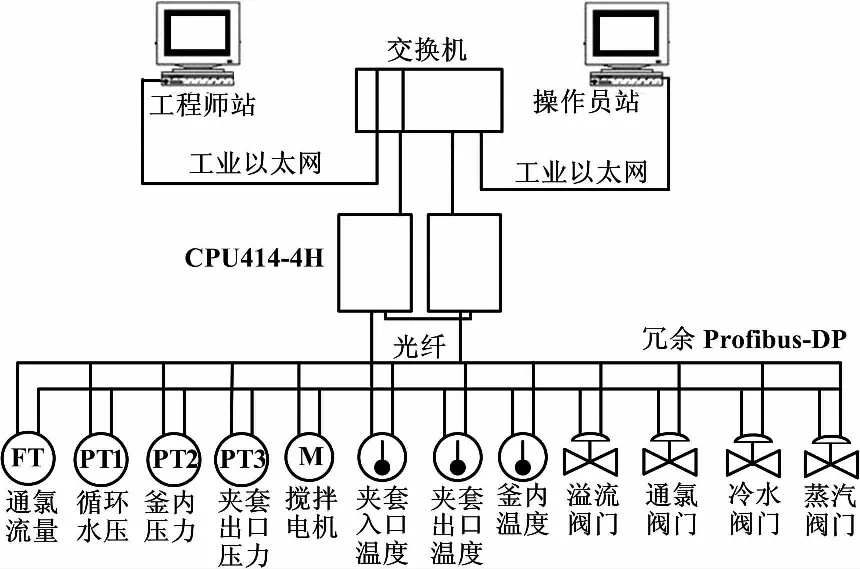
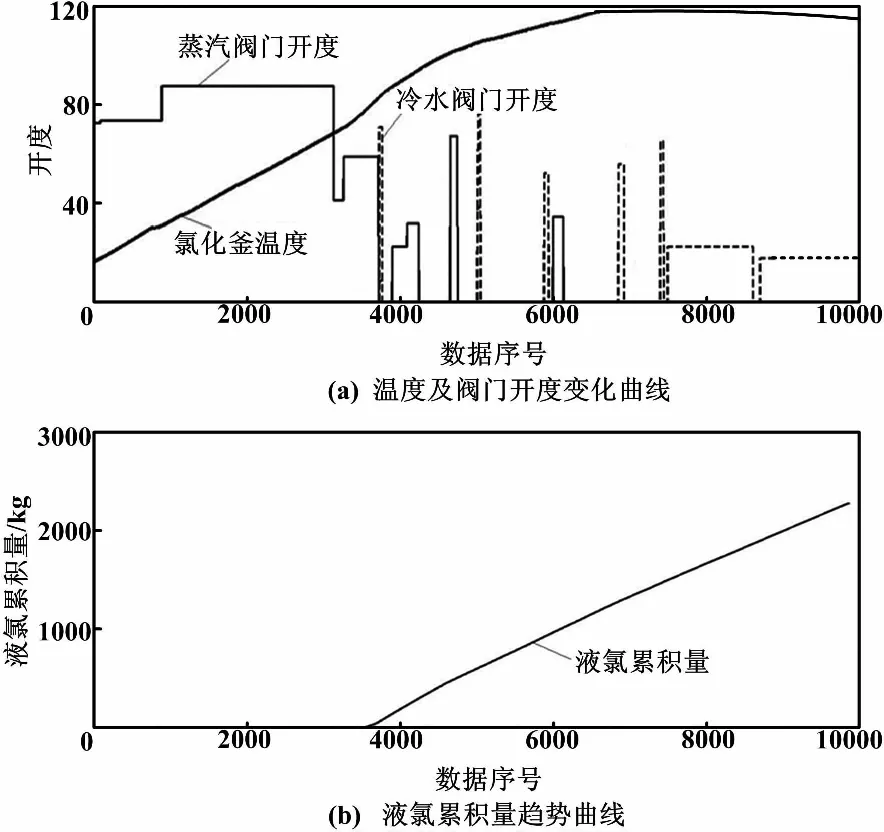
① 如果m≤keei≤m+1,m ② 如果keei<-nkeei<-n,量化值为-n; ③ 如果keei>nkeei>n,量化值为n。 对偏差变化eci进行量化时,与上述对ei量化的过程相同。 控制量u的变化范围选择为[-100,100]。u∈[-100,100]表示冷水阀门的开度;u∈[-100,0]表示蒸汽阀门的开度;最小值-100和最大值100分别表示蒸汽阀门和冷水阀门的全开;u=0则表示蒸汽阀门和冷水阀门均需关闭。模糊子集U的论域为U={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},比例因子为: (3) 模糊控制器选取三角波隶属度函数,偏差E选用8个语言值,即{NL,NM,NS,NO,PO,PS, PM,PL}。E的隶属度函数定义如图3所示。 图3 偏差E的隶属度函数 偏差变化EC和控制量U选用7个语言值,即{NL,NM,NS,ZO,PS,PM,PL}。EC和U的隶属度函数定义如图4所示。 图4 偏差变化EC与控制量U的隶属度函数 本文采用双输入-单输出的二维模糊控制器,模糊控制规则如表2所示。表2中,控制量U是根据偏差E与偏差变化EC共同决定产生的。考虑到温度的大滞后特性,整个控制过程中,尤其是偏差较小时,不采用大的控制量。这种做法能够更加充分利用氯化反应释放的热量,从而达到节约能源的效果。 表2 模糊控制规则 表2中所示的模糊规则可表示成56个条件语句,具体条件语句的形式如下: IF E=NL AND EC=NL, THEN U=PL IF E=NL AND EC=NM, THEN U=PL …… IF E=PL AND EC=PL, THEN U=NL 本文采用MIN-MAX-重心法[5]作为模糊推理机的方法。每一个模糊规则都决定一个论域幂集上的三元模糊关系Ri: Ri=(Ei×ECi)T列×Ui (4) (5) 最终得到与输入的偏差E和偏差变化EC相对应的控制量U,此时所得到的U不能直接对控制对象进行控制,需要乘上比例因子ku。ku经过清晰化后,才能够作为控制量输出作用于控制对象。 PCS7中集成了SCL编程语言,本文采用SCL语言实现模糊控制器功能块的编程。所形成的模糊控制器功能块“FUZZY_CTRL”示意图如图5所示。输入信号TEMP_PV为温度过程值,TEMP_SP为温度设定值,FUZZY_A表示模糊控制器是否投入使用,U_MAX为控制量最大值(可调节),U_F_ON标志是否需要输出强制控制量,U_F_ON为1时,强制控制量U_Force起作用。输出信号FUZZY_ O为模糊控制器输出的控制量,FUZZY_R标志模糊控制器是否启用。 图5 模糊控制器功能块示意图 Simatic PCS7是Siemens推出的以高性能S7系列控制器为核心的过程控制系统。本文采用S7- 400H作为控制器,通过Profibus总线完成S7- 400H与现场设备的通信,采用工业以太网完成PLC与上位机的通信。软件采用PCS7实现控制程序的编写以及用户界面的组态。 控制系统的结构如图6所示。 图6 控制系统结构示意图 S7- 400H具有毫秒级的冗余切换功能[6]。正常运行时,一台CPU处于工作状态,进行信号检测、运算,以及控制输出;另一台CPU处于热备状态。当处于工作状态的CPU发生故障时,热备CPU迅速启动。这样的设计能够保证系统具有很强的容错性能,确保系统的正常运行,为氯化聚乙烯的稳定生产创造有力保障。 利用仿真软件获取控制系统的阶跃响应曲线,验证模糊控制器的可靠性与稳定性,为实际工程实施提供方向性指示。控制器阶跃响应曲线如图7所示。 图7 控制器阶跃响应曲线 该控制系统自投运以来运行稳定,控制效果满足现场需求。控制器投入前后的系统趋势曲线如图8和图9所示。 图8 控制器投入后系统趋势曲线 图9 控制器未投入时系统趋势曲线 对比图8和图9所示的趋势曲线可以看出,与控制器投入前相比,投入后所得趋势曲线中的氯化釜温度变化更为平缓,无明显波动,这样更加有利于氯化反应产物中氯原子的均匀分布;此外,自动控制程序能够在基本维持蒸汽和冷水总消耗量相对不变的前提下,降低蒸汽阀和冷水阀的开关频率,延长阀门寿命。程序运行时能够保证无操作员手动干预生产,这使得在不增加工人数量的前提下实现大规模生产(多釜同时生产)成为可能,从而大大提高了生产效率。 除能够实现无人工干预、大规模生产和延长设备使用寿命外,控制器投入使用后在实现温度控制上更加精确。为更好地说明程序控制的效果,记录液氯累积量在节点处(即160 kg、850 kg、1 850 kg、3 270 kg时)所对应的氯化釜温度,将其与工艺要求的85 ℃、110 ℃、130 ℃、137 ℃相比较进行误差计算,控制器投入前后效果对比如表3所示。除对温度的直观控制效果进行对比外,表3中还包括了氯化聚乙烯产品质量指标中的氯含量、残余结晶度[7]、热分解温度[8]等方面的对比。从表3可以看出,控制器投入使用后控制效果更能够满足工艺要求,在很大程度上提高了产品质量。 表3 控制器投入前后效果对比表 本文采用模糊算法对氯化釜温度进行控制。通过SCL语言实现模糊控制器的编程,设计控制器的FB功能块,取得了较好的控制效果。根据现场所获取的数据绘制相应趋势图,通过图表对比控制器投入前后的控制效果。分析数据得知,在综合考虑多个质量指标的前提下,控制器的投入获得了较好的控制效果:生产过程中实际温度与设定温度的最大偏差大大缩小;标定氯化聚乙烯质量的主要指标,如含氯量、残余结晶度、热分解温度等在保证温度控制精度的前提下均有明显改善。同时,所设计的模糊控制功能块具有较强的可移植性,能够适用于多个控制问题。总之,控制器的投入在减少人力需求的同时,有效地提高了温度控制的精度,大大降低了生产成本,为生产出更高质量的产品提供保障。 [1] 李玉芳.氯化聚乙烯的生产应用及市场分析[J].化工科技市场,2006,29(1):16-20. [2] 乔杰.间歇式反应釜温度控制系统研究[D].上海:东华大学,2010. [3] 朱廷峰.模糊控制在间歇式反应釜上的应用研究[D].大连:大连理工大学,2006. [4] 米勒.西门子自动化系统实战S7和PCS7应用实例[M].张怀勇,译.北京:人民邮电出版社,2007. [5] 王志新.智能模糊控制的若干问题研究[M].北京:知识产权出版社,2009. [6] 姜建芳.西门子S7-300/400 PLC工程应用技术[M].北京:机械工业出版社,2012. [7] 张军.低残留结晶度氯化聚乙烯的热稳定性和性能的研究[D].南京:南京工业大学,2003. [8] 沈清.氯化聚乙烯行业标准及产品质量[J].安徽化工,2001,17(3):36-37.





3 系统配置
4 阶跃响应及控制效果



5 结束语
猜你喜欢
化工管理(2022年14期)2022-12-02
有色设备(2021年4期)2021-03-16
组合机床与自动化加工技术(2019年3期)2019-04-08
科技与创新(2017年14期)2017-08-09
中国卫生标准管理(2015年25期)2016-01-14
中国氯碱(2015年9期)2015-11-02
中国氯碱(2015年11期)2015-06-15
中国氯碱(2014年6期)2014-08-15
组合机床与自动化加工技术(2014年9期)2014-03-01
中国氯碱(2014年10期)2014-02-28
