基于电动助力转向系统的车辆主动悬架动力学仿真研究
2014-03-29 10:23范长胜郭艳玲
节能技术 2014年3期
范长胜,郭艳玲
(东北林业大学 机电工程学院,黑龙江 哈尔滨 150040)
电动助力转向(Electric power steering,EPS)和主动悬架(Active suspension system,ASS)是车辆的重要组成部分,直接影响到车辆行驶平顺性和操纵稳定[1-3]。本文重点研究的是主动悬架系统,为电动助力转向系统研究提供理论依据和实验数据。目前在汽车上应用较为广泛的是被动悬架系统,由于弹簧刚度和减振器阻尼系数不可调节,对不同的路面状况调节能力十分有限[1]。因此,现代汽车大都希望安装能根据不同路况自动调节的电子控制悬架系统,它可根据不同路况来抑制不平路面造成的冲击,实时主动地调整和产生所需的悬架控制力,以抑制车身的振动,使悬架处于最优减振状态[4-5]。它分为半主动式和主动式两大类。主动式悬架可使汽车的悬架特性依据道路状况和行驶状态与之相适应,从而保证汽车行驶的平顺性、操纵的稳定性和乘坐舒适性。
1 系统模型建立
1.1 主动悬架的动力学模型
建立汽车悬架模型是进行性能分析和系统设计的基础。车辆模型可简可繁,从二自由度的1/4车模型到复杂的七自由度整车模型都可以用来设计悬架。1/4车模型是设计汽车可控悬架控制规律最基本的模型[6]。如果对主动悬架进行细致的研究,能够准确地预测悬架参数对车辆性能的影响,就需建立精确的整车模型。但精确的的大模型建立较为复杂且各部件联系又较为紧密不能够使问题得到迅速而有效的解决。尽管各种悬架结构不同,但研究来自不平路面激励引起车体的垂直振动都可用1/4车辆力学振动模型表示。这是由于,虽然1/4车模型没有包括汽车的整体几何信息,也无法用它来研究汽车俯仰角振动和侧倾角振动,但它包含了实际问题中的绝大部分基本特征,如负载变化和悬架系统受力信息等,我们研究的主要是根据不同路面情况引起的车体垂直振动。因此,可建立二自由度的1/4车模型进行问题的分析。图1所示为1/4车模型。

图1 主动悬架二自由度1/4车模型
目前对车辆主动悬架控制策略的研究都是建立在悬架系统数学模型基础上的,但由于精确的数学模型不易建立[4]。因此国内外学者大都选择建立1/4车的主动悬架机械模型,在此基础上生成车辆主动悬架系统的动力学方程。在此动力学方程上与PID控制结合起来,提高控制系统的实时性和鲁棒性。将其与被动悬架相比有效地降低了车身加速度、轮胎的相对动载荷,提高了汽车的操纵稳定性与乘坐舒适性。1/4车模型的动力学特性可由微分方程描述为式(1)。
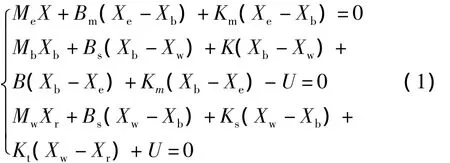
式中 U——主动力输入;
Mw——轮胎质量(簧下);
Mb——1/4车身质量(簧上);
Me——发动机质量;
Kt——轮胎刚度系数;
Ks——被动悬架刚度系数;
Bs——被动悬架阻尼系数;
Km——发动机底座刚度系数;
Bm——发动机底座阻尼系数;
Xr——路面输入;
Xw——轮胎位移;
Xb——车身位移;
Xe——发动机位移。
1.2 车辆仿真模型的建立
主动悬架通常指悬架系统能根据汽车载荷、行驶速度、路面状况等行驶条件的变化产生主动控制达到自动调节悬架刚度的目的[5]。主动悬架的设计必须结合车辆运行的实际情况,因此,依据1/4车模型的动力学特性,定义主动悬架的控制策略可知在进行车辆的仿真研究时其主要研究的控制对象为车身垂直加速度,由式(1)的1/4车系统的动力学方程,在Simulink中可建立其仿真模型,如图2所示。

图2 车辆仿真模型
1.3 路面输入模型
路面的随机输入对悬架在时域或频域内的性能起着决定作用[6]。当车辆行驶在路面上时,路面的不平度使其产生强迫振动,即路面不平度与垂直位移功率谱、垂直速度功率谱和垂直加速度的谱密度共同作用相关,它们都与路面的粗糙度及车速成正比。当频率指数恒定时,可建立积分白噪声的随机路面轮廓。可用式(2)描述。

w(t)——单位白噪声。
应用MATLAB/Simulink可以构建路面的随机输入,并在模型中的示波器中显示路面的不平度,如图3所示。
2 Simulink控制模型的建立
2.1 主动悬架PID控制器的设计

图3 路面随机输入模型
对主动悬架控制是为了使汽车行驶的平顺性和操纵安全性更好,通常由3方面的性能改善来作为评定标准[7],即车身垂直加速度 x¨b,轮胎动载荷kt(xw-xr)及悬架动行程(xb-xw)。国外学者对悬架系统的优化设计进行了大量研究工作,Thoresson[7]和Baumal[8]都以车辆的垂直方向加速度为目标,进行悬架参数的优化设计。本次研究也选取车身垂直加速度为控制对象,以减小车身加速度为目标,建立PID控制器使主动悬架控制系统设计接近理想状态即车身垂直加速度为零值。依据这一目标可得到传递函数的偏差为e=0-xb=-xb,即输出量x¨b与目标值0之间的差,车速u是主动悬架控制力,是作用于被控对象悬架并引起输出量x¨b的变化,于是构建PID控制模型[9-10],如图4所示。

图4 PID控制模块
PID控制模块根据采集信号输入量按照程序内置的算法对悬架系统发出控制指令,以便对悬架的3个参数指标作出相应控制。本文PID参数的整定采用凑试法。根据KP、Ki、Kd三个参数在系统中的作用,经多次试凑调整可以得到较理想的仿真曲线,三个参数的参考值为:KP=95,Ki=8,Kd=5。
2.2 悬架系统仿真建模分析
主动悬架控制系统的仿真模型是在Simulink环境中构建的,整个仿真系统包括悬架模型、随机路面输入模拟模型和已经封装好的控制器(被动、PID)模型及它们的连接,图5所示是整个控制系统的整体模型。

图5 主动悬架控制系统模型
在图5中,Car部分是悬架系统的模型;Noise是扰动输入即随机路面。为了分析所设计的PID控制系统的合理性,在本文中选取B级路面和等级较差些的D级路面作为扰动输入。系统模型由两种控制策略组成,即由被动控制策略和PID控制策略。这两种控制策略分别由两个子模块分别实现,将两个子模块分别连接到一个控制开关(Multiport Switch)的各对应端口上,由内部程序控制变量Ctr1_type选定其中一个端口,每个端口对应一种控制策略,这样就可由控制策略计算出相应的控制力U。
3 主动悬架系统仿真和结果分析
在我国的公路等级路面面谱中大多为B级和D级这两种路面。在进行控制系统的性能仿真时选取这两种路面作为随机扰动输入,车速选择为20 m/s[13-14]。并对两种控制策略进行仿真分析。当将Ctr1_type置为1时,输出U=0,此时采用被动控制策略,可得到图6、7所示的B级和D级路面下车身加速度的仿真结果图。采用PID控制策略时,相应的B级和D级路面下车身加速度的仿真结果如图8和图9所示。
在图6和7中可看出,在B级路面输入下车身加速度变化范围在-0.7~0.7 m/s2之间;D级路面输入下车身加速度变化范围在-2.6~2.6 m/s2之间。在图8和9中,在B级路面输入下车身加速度变化范围在-0.5~0.5 m/s2之间;D级路面输入下车身加速度变化范围在-2~2 m/s2之间。
PID控制使得悬架性能指标得到改善。为了验证所设计的主动悬架控制系统的性能是否符合平顺性标准,将加速度进行了均方根的运算其结果如表1所示。

表1 车身加速度的均方根值

图6 B级路面下车身加速度曲线

图7 D级路面下车身加速度曲线

图8 B级路面下车身加速度曲线

图9 D级路面下车身加速度曲线
从表1中可以看出,主动悬架控制系统对车辆的平顺性能也有较好的改善,在B级路面,车身加速度均方根值经过PID运算后可以降低12.78%;在D级路面,可降低22.18%。以上所得到的数值基本在人对振动感觉的舒适范围之内。但在D级路面状态下由于路面等级较差在上面行驶时振动感较强烈,扰动性较大通过主动控制器后车身振动得到很好改善,因此改善状况也较大。
4 结论
通过对车辆主动悬架系统的分析研究,建立了主动悬架系统的动力学模型和车辆仿真模型。采用PID控制器对其进行控制设计与仿真研究,得出在对系统进行PID控制时,系统在不同的路况下车身的加速度都能得到相应的改善,使车辆的平顺性变好,并且路况越差则改善的效果就越明显。
[1]向丹,迟永滨,李武波,等.电动助力转向系统控制策略及其仿真研究[J].控制工程,2013,20(2):254-258.
[2]肖柏青.电动助力转向系统建模与助力控制策略仿真分析[J].北京汽车,2013(2):25-28.
[3]程安宇,金辉,苗艳强,等.基于PID控制优化电动助力转向系统研究及仿真[J].机械设计与制造,2012(7): 156-158.
[4]喻凡,张勇超.馈能型车辆主动悬架技术[J].农业机械学报,2010,41(1):1-5.
[5]刘栋,唐焱,顾慧芽.汽车主动悬架控制系统的发展研究[J].液压气动与密封,2010(5):21-24.
[6]孟杰,张凯,焦洪宇.空气悬架的MATLAB和ADAMS的联合仿真研究[J].机械科学与技术,2013,32(4): 584-588.
[7]Thoresson M J,Uys P E,et al.Efficient optimisation of a vehicle suspension system,using agradient-based approximation method,part1:mathematical modeling[J].Mathematical and Computer Modelling,2009,50:1421-1436.
[8]Baumal A E,McPhee J J,Calamai P H.Application of genetic algorithms to the design optimization of an active vehicle suspension system[J].Comput Method Appl Mech Engrg,1998,163:87-94.
[9]宁礼佳,郭婷婷,武志明,等,流量可控式红外线感应水龙头控制模块设计[J].节能技术,2013,31(3):247-249.
[10]徐澎波,王伟杰,黄晓童.采用神经网络:模糊PID的换热站控制器设计与仿真[J].节能技术,2012,30(3): 247-249.
[11]杨英,刘刚,赵广耀.基于ADAMS机械模型的车辆主动悬架控制策略与仿真[J].东北大学学报,2006,27(1): 72-75.
[12]任卫群,金国栋.可减小道路破坏性的车辆主动悬架设计[J].中国机械工程,2004,15(22):2059-2063.
[13]兰波,喻凡.车辅主动悬架LQG控制器的设计与仿真分析[J].农业机械学报,2004,35(1):13-18.
[14]陈龙,张金超,汪若尘,等.全簧载质量范围内超微型汽车悬架全局优化[J].江苏大学学报,2012,33(5):502-507.
猜你喜欢
世界汽车(2022年11期)2023-01-17
青少年科技博览(中学版)(2022年11期)2023-01-07
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
北京汽车(2016年6期)2016-10-13
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
现代制造技术与装备(2015年4期)2015-12-23
汽车维修与保养(2015年7期)2015-04-17
汽车维护与修理(2015年6期)2015-02-28