
基于红外探测技术的汽车夜视系统研究
2014-03-27 02:03:35张志峰翟玉生杨桂栓申帅锋毛雯静杜银霄
应用光学 2014年6期
张志峰,翟玉生,杨桂栓,申帅锋,毛雯静,乔 林,杜银霄
(1.郑州轻工业学院 物理与电子工程学院,河南 郑州 450002;2. 郑州航空工业管理学院数理系,河南 郑州 450015)
引言
随着汽车的普及,驾车发生事故的比例也在逐年提高,其中约70%的交通事故是在夜间发生的[1]。在夜间行车时,驾驶员的视线范围变得狭窄,对于暗中物体的识别能力会显著下降,同时当打开汽车前照远光灯来拓展视野范围时,如果前方有相向行驶的车辆,由于远光灯亮度极高,极易让驾驶员产生眩目感,给行车带来安全隐患。由于人眼所能感应到380 nm~780 nm的可见光波段,对于近红外波段的光不敏感,因此为了拓展人眼的视觉范围同时减少光对人眼的直接眩目刺激,一般采用红外波段和微光放大来拓展视野范围。光电探测技术在各个机械加工、安全监控、农产品质量检测等各个领域得到了广泛应用[2-6],其中由于近红外波段图像具有特征信息图像,因此是研究的一个热点[7-10]。
本文采用近红外成像技术设计了低成本的汽车夜视仪,其中红外照射装置安装在驾驶室外的汽车车灯位置附近,红外接收感应器件安装在红外摄像头附近,这样能够有效改善驾驶员视野范围内的清晰度,同时增加夜间汽车会车时强光弱化处理系统,减少汽车远光灯强光对来向行驶人员视觉的刺激,降低夜间交通事故的发生概率。
1 汽车夜视系统工作原理
1.1 夜视仪工作原理
采用主动式近红外探测技术的车载夜视仪系统主要由前端红外发射单元、红外线成像单元和图像显示单元组成,系统的组成框图如图1所示。前端的红外发射单元由前端红外光源的驱动控制电路、红外线发射的LED光源、扩束透镜组成;红外成像单元由成像透镜、图像传感器和图像信号采集电路组成;图像显示单元由显示驱动控制电路和数字显示屏组成。
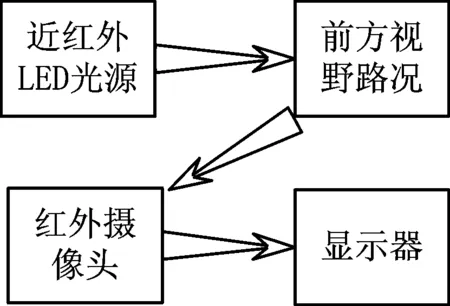
图1 近红外夜视仪系统结构框图Fig.1 Block diagram of near infrared night-vision system structure
该系统由红外光源驱动控制红外LED光源发出近红外光波(光能量主要集中于800 nm~1 000 nm光波段),被照射到的物体通过漫反射红外线,经近红外摄像头的成像透镜成像于能感应近红外波段的CCD图像传感器上,然后通过图像采集卡将近红外图像传输至显示屏显示,供驾驶员观看前方路况。
1.2 系统光路设计
随着照明技术的发展,汽车车灯也在不断革新,老式的白炽灯、卤素灯、氙气灯存在着电光转换效率低、照明可见光有效成分比例低、能源利用率低等缺点,逐渐将被淘汰,新型LED光源具有高亮度、高能效、较短的反应时间、远距离穿透、使用寿命长等优点,已成为汽车信号灯的主流,随着大功率白光LED相关技术难题逐渐被攻破,大功率白光LED灯也将成为未来汽车前照灯发展的主流方向[4]。用于汽车前照远光灯的白光LED光源,其发射的光集中于可见光波段[5]。由于CCD图像传感器能感应的光波段范围较宽(300 nm~1 100 nm),包含了可见光波段。当夜间汽车会车时,为了减少可见光远光灯发射的高亮度光线对CCD图像传感器产生“眩目”感,在成像透镜的前方添加一片800 nm~1 000 nm的带通滤光片,光路如图2所示。
2 实验结果及讨论
2.1 实验系统
实验系统采用汉康威视HKWS-35A近红外监控摄像头,主要参数:1/3″CCD传感器,PAL制式,分辨率600TVL,电源电压DC12V;输出视频:1Vp-p75Ω,采用USB-1304四通道USB图像采集卡,使用DVR数字监控系统DVR2.26实时观察采集到的视野图像。根据近红外监控摄像头的结构特点[7],以及所设计的夜视仪系统的光路特点,需要进行以下改装:
1) 用黑色不透光胶带将摄像头的光敏电阻遮挡,这样可以将成像透镜与面阵CCD之间的红外滤光片去掉;
2) 在成像透镜前加一片800 nm~1 000 nm带通滤波片,这样CCD仅能接收到800 nm~1 000 nm的近红外光波。
改装后的摄像头实物图如图3所示。

图3 改装后的摄像头实物Fig.3 Object of modified camera
2.2 模拟实验场景及结果
针对夜间行车会车时实际场景,我们进行了实验室模拟环境下的会车场景实验,会车时汽车前方的模拟实际路况如图4所示,一个发光面为199 mm×36 mm的LED条形光源(AFT-WL21244-22,维视数字图像技术有限公司)模拟汽车远光灯,光源周围3个光具座模拟行人。

图4 模拟汽车会车时路况Fig.4 Simulation experiments of car meeting
图5为不同情况下人眼及系统采集的图像:图5(a)为未开启可见远光灯时的人眼视觉图像;图5(b)为开启可见远光灯时的人眼视觉图像;图5(c)为夜视仪所观察到的路况场景。通过图像对比发现驾驶员在未开启可见远光灯的情况下,由于来向车灯的强光眩目,极易造成驾驶员误判;如果开启可见远光灯,这时可以看到前方车身周围的行人,但由于来向车灯的强光仍然刺眼,造成驾驶员识别率下降;在采用夜视仪系统的情况下,来向车灯的强光被大大削弱,驾驶员无眩目感,车身周围的行人清晰可见,大大提高了驾驶员的识别率和判断正确性,保障了行车安全。

图5 不同情况下采集图像Fig.5 Images collected in different situations
2.3 现场实验结果
在进行模拟场景的实验之后,对该夜视系统进行了实地场景测试,选取了市区内繁华路段和市郊环城路段两路段,进行了不同环境光照度及汽车夜视仪的测试实验,测试结果如下:
1) 郑州市东风路
环境光照度测试结果:无汽车开远光灯时光照度为2.5 lx~3.5 lx(此时有路灯和临街灯光的影响);有汽车开远光灯(在150 m处)时的照度4.0 lx~6.0 lx。
通过该路段的汽车其中装有新型白光LED前照灯的汽车数量较少,通过该夜视系统所观察到的新型白光LED前照灯汽车夜视效果图如图6所示,图中标记框内是前照灯为白光LED灯的汽车,夜视仪图像无眩目感,前照灯为普通卤素灯或氙灯的汽车仍具有眩目感。

图6 郑州市东风路汽车前照灯效果图Fig.6 Headlamp image captured by system at Dongfeng road
2) 郑州市北三环天桥
环境光照度测试结果:无汽车开远光灯时光照度为1.5 lx~3.0 lx(此时有路灯灯光的影响);有汽车开远光灯(在150 m处)时的照度3.0 lx~6.0 lx。
该路段为入市口,车流量较大,通过该路口的装有新型白光LED前照灯的汽车数量相对较多,该夜视系统所观察到的新型白光LED前照灯汽车夜视效果图及传统汽车前照灯夜视效果图如图7所示。实验结果表明夜视系统识别漏检率为1.3%。

图7 郑州市北三环通行车辆Fig.7 Images of different headlamps captured by system on north third ring road bridge
实验结果表明:传统车灯所辐射的大部分红外成分对夜间照明是无用的,可见光能效较低,存在能源浪费的问题,因此新型白光LED汽车前照灯推广应用非常重要,基于红外图像处理汽车夜视系统能够有效地保证汽车安全驾驶。
3 结论
在夜晚光线较弱的情况下,通过本车载夜视系统能够拓展视野范围,并且会车时在对方车灯强光眩目的情况下,能够通过本系统清楚呈现汽车前方的人眼不能看到的路况,保证夜间行车安全;同时通过设计车灯自动调控系统,在夜间会车时自动切换本车的远近光车灯,避免驾驶员因频繁手动切换远近光灯而造成注意力分散,减少对来车司机视线的影响,该系统可以保证会车时双方的行车安全,减少夜间交通事故的发生。模拟场景实验能够有效实现系统功能,实际场景实验表明该系统存在不足,但测试结果能够促进新型白光LED汽车前照灯的普及应用和该系统的推广发展,对节能减排和汽车安全驾驶具有一定的指导意义。
[1] Chen Xinfa, Liao Ying, Yang Liubin. Research and development of new-type active infrared night vision system for automotive[J]. Infrared, 2009, 30(2): 24-27.
陈新发, 廖颖, 杨柳彬. 新型汽车主动式红外夜视系统的研究与开发[J].红外, 2009.30(2): 24-27.
[2] Zhang Zhifeng, Zhai Fengxiao, Yang Hongjun, et al. Research on cotton fiber qualities evaluation based on optoelectronic techniques[J]. Optik, 2013, 124(19): 3876-3879.
[3] Zhang Zhifeng, Gao Zhao, Liu Yuanyuan, et al. Computer vision based method and system for online measurement of geometric parameters of train wheel sets[J]. Sensors, 2012, 12(1): 334-346.
[4] Zhang Zhifeng, Jiang Fengchun, Yang Kun, et al. A novel method to assess cotton fiber fineness and maturity based on optoelectronic measurement[J]. Acta Photonica Sinica, 2011, 40(3): 397-400.
张志峰, 蒋逢春, 杨坤, 等. 基于光电检测技术棉花成熟度快速评估方法的研究[J]. 光子学报, 2011, 40(3): 397-400.
[5] Li Fanming, Niu Jiyong, Ma Lixiang. Feasibility analysis of space target detection based on infrared polarization properties[J]. Journal of Applied Optics, 2013, 34(4): 653-657.
李范鸣, 牛继勇, 马利祥. 基于红外偏振特性的空间目标探测可行性探讨[J]. 应用光学, 2013, 34(4): 653-657.
[6] Yang Guishuan, Zhang Zhifeng, Zhai Yusheng, et al. Study on influence of dead zone on detection range and sensitivity four-quadrant detector[J]. Laser & Optoelectronics Progress, 2013, 50(6): 062303-1-6.
杨桂栓, 张志峰, 翟玉生, 等. 死区对四象限探测器探测范围和灵敏度影响的研究[J]. 激光与光电学进展, 2013, 50(6): 062303-1-6.
[7] He Zijian, Wang Kewei, Ma Lifang,et al. Design and application of spectral polarization imaging detection system[J]. Journal of Applied Optics, 2014, 35(2): 210-214.
何梓健, 王科伟, 马丽芳, 等. 一种光谱偏振成像系统设计及应用[J]. 应用光学, 2014, 35(2): 210-214.
[8] Zeng Shuisheng, Wang Min, Liu Yali, et al. Developed on the near-infrared weak optical signal detection lens[J]. Acta Photonica Sinica, 2013, 42(3): 278-281.
曾水生, 王敏, 刘雅丽, 兰明强. 近红外微弱光信号检测镜头的研制[J]. 光子学报, 2013, 42(3): 278-281.
[9] Gao Jing, Sun Jiyin, Wu Kun,et al. Infrared target detection based on shape characteristics[J]. Laser & Infrared, 2013, 43(1): 49-53.
高晶, 孙继银, 吴昆, 等. 基于形状特征的红外目标检测方法[J]. 激光与红外, 2013, 43(1): 49-53.
[10] Li Chao, Liu Tiegen, Liu Hongli, et al. Near-infrared face recognition by fusion of SVM and AdaBoost[J]. Laser & Infrared, 2012, 42(2): 192-196.
李超, 刘铁根, 刘宏利, 等. 融合SVM和AdaBoost的近红外人脸识别方法[J]. 激光与红外, 2012, 42(2): 192-196.
猜你喜欢
装备制造技术(2021年1期)2021-05-21 07:55:10
电子测试(2018年22期)2018-12-19 05:13:02
汽车维护与修理(2018年7期)2018-10-13 06:03:48
军事文摘(2016年24期)2016-12-10 02:49:02
汽车维护与修理(2016年4期)2016-11-26 06:29:50
大科技·百科新说(2016年4期)2016-05-20 09:36:24
汽车零部件(2014年7期)2014-06-23 16:26:07
汽车电器(2014年8期)2014-02-28 12:14:29
汽车电器(2014年8期)2014-02-28 12:14:27
经营者·汽车消费报告(2013年3期)2013-05-13 05:48:20
