基于两航向测量的舰船任意航向磁场计算方法
2014-03-20 02:23:40汪永浩张国友
船电技术 2014年4期
汪永浩,张国友
(海军工程大学电气与信息工程学院,武汉 430033)
0 引言
为了提高舰船磁性安全度,迫切需要知道舰船磁场的分布情况,从而为舰船磁隐身等方向的研究和工程应用提供依据[1-5]。测量不同航向的舰船磁场需要较多的人力和物力,花费大量的时间,对于大型舰船来说,在工程上往往无法实现,为了节省资源,节约时间,提高效率,采用相反的两个非主航向上舰船三分量磁场实测数据,直接计算出任意航向舰船三分量磁场,具有较强的工程应用前景。
1 任意航向舰船磁场分析计算
1.1 舰船磁场特性分析

1.2 不同航向角下舰船磁场分析
感应磁场随地磁场成正比变化,而舰船固定磁场不随地磁场变化。因此当舰船的航向角为θ时,舰船舷下三分量磁场的表达式为:
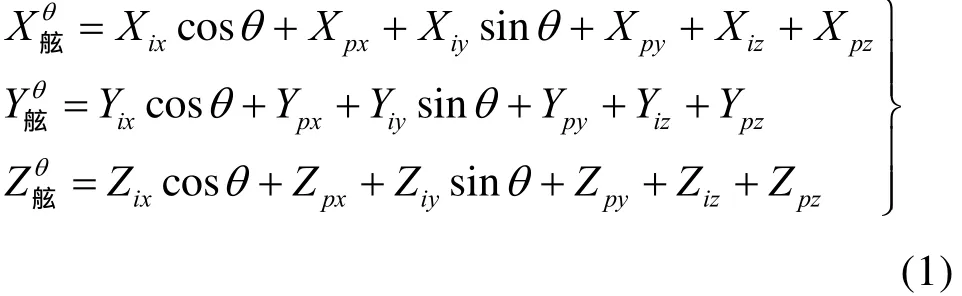


图1
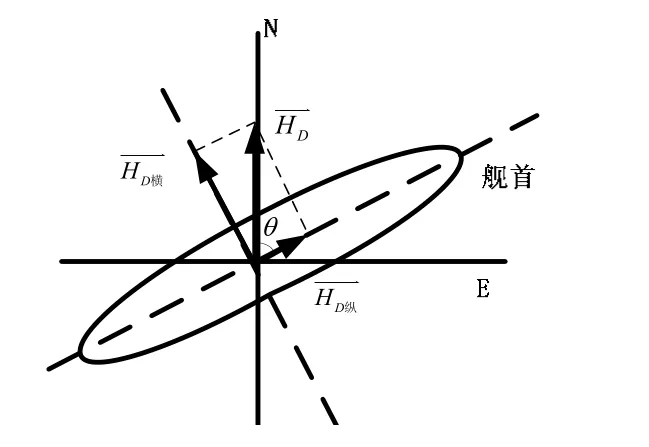
图2
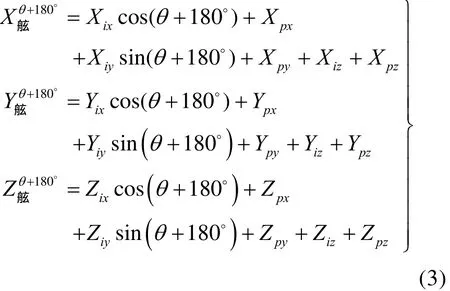
当航向角为180θ+°时,即在相反的航向上舰船舷下三分量磁场的表达式为:
龙骨下三分量磁场的表达式为:
1.3 任意航向舰船磁场计算


通过以上公式就可以由航向为φ和180φ+°两个方向上舰船的三分量磁场实测数据计算出任意航向θ时舰船三分量磁场。
2 实验验证
2.1 实验设计
在一个可以旋转的实验台上对某舰船模型三分量磁场进行测量,利用磁传感器测量舰船模型吃水线下某深度的磁场数据。舰船模型龙骨下从舰首到舰尾均匀等距放置7个磁传感器,左右舷下从舰首到舰尾均匀等距各放置3个磁传感器。以磁北航向为起点,每隔10°角对舰船模型三分量磁场进行一次测量。选取航向角为50°和230°两个相反方向时舰船模型三分量磁场测量数据来计算任意航向角舰船模型三分量磁场,并与对应航向角舰船模型三分量磁场测量数据进行对比,验证计算方法的正确性。
2.2 实验结果
实验中共有13个测量点,分36个航向对舰船模型三分量磁场进行测量,在验证时对13个测量点和各航向均进行了验证,本文只选取13个测量点中具有代表性的4个测量点:龙骨下选取两个测量点,分别为龙骨下第1个和第4个磁传感器所测点位置,简称为龙1和龙4;左右舷各选取一个测量点,分别为左舷第3个磁传感器所测点位置和右舷第1个磁传感器所测点位置,简称为左3和右1。舰船模型左3、右1、龙1和龙4测量点由计算公式计算出的不同航向角三分量磁场数据与实测三分量磁场数据对比,情况如图3~6所示,图中数据经过了归一化处理,横坐标1~36 代表航向角0°~350°。
2.3 实验分析


图5 龙骨第1个测量点三分量磁场计算值和测量值
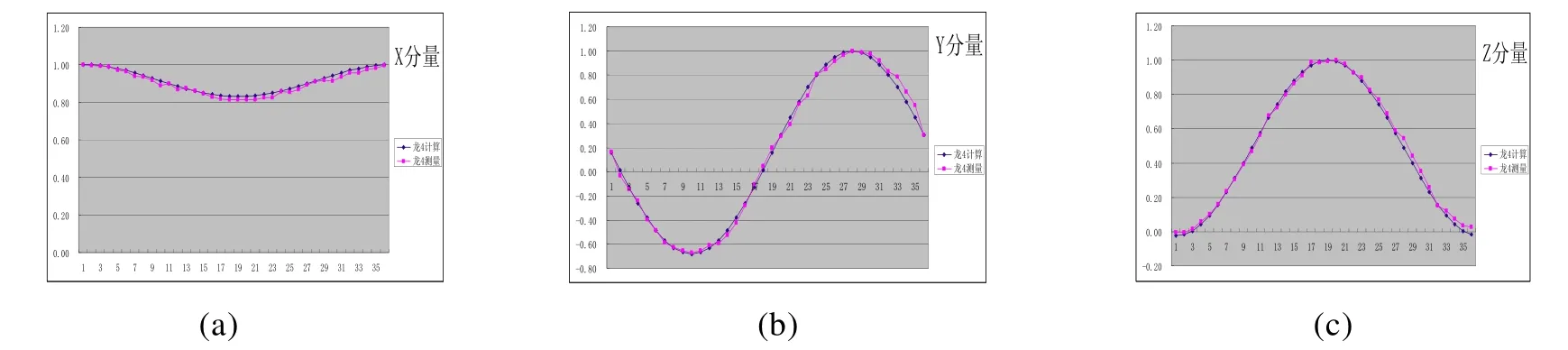
图6 龙骨第4个测量点三分量磁场计算值和测量值

表1 舰船模型测量点三分量磁场相对误差分析结果
从相对误差分析结果中可以看到,舰船模型4个测量点X、Y、Z分量磁场各自相对误差平均值小于4%,最小值小于0.5%,除了左3的Y分量、龙1的Y分量、龙4的Y分量、龙4的Z分量相对误差最大值在 5%到 10%之间,其余各分量相对误差最大值都小于 5%。通过相反的两个非主航向上的舰船模型三分量磁场推算得到的任意航向上舰船模型三分量磁场数据与实测数据非常吻合。
分析实验误差原因主要有以下三个方面:一是测量舰船模型不同航向角时,航向角存在偏差,对测量数据造成一定的误差;二是实验室测量精度所致,磁传感器测量某分量实测数值较小时,磁传感器测量仪器精度对其影响较大;三是个别磁传感器在舰船模型旋转过程中发生晃动,相对位置发生改变,磁传感器测量不是十分准确。
实验还分别利用了10°与190°、 30°与 210°和80°与260°相反航向上舰船模型三分量磁场测量数据来计算任意航向角舰船模型三分量磁场,并与对应航向角舰船模型三分量磁场测量数据进行对比,相对误差分析结果分别见表2、表3、表4。
对比分析表1~4中的相对误差结果,可以发现,由4组不同相反航向上磁场测量数据推算的任意航向磁场数据中,测量点磁场X分量相对误差平均值在 5%内,磁场Z分量相对误差平均值小于6%。而不同航向上的测量点磁场Y分量相对误差变化较大,其中由10°与190°航向上磁场测量数据推算的任意航向磁场Y分量相对误差最为明显,相对误差平均值均超过 5%,相对误差最大值在 10%到 20%之间。由50°和230°航向上三分量磁场测量数据计算的任意航向角舰船模型三分量磁场,比由10°与190°、 30°与 210°和80°与260°相反航向上计算的磁场数据更准确,能更好的表现出磁场分布情况。因此,为更准确的计算任意航向舰船三分量磁场,应选取50°或140°附近的一对相反航向上舰船磁场测量数据进行计算,尽量避免选取10°或80°等在主航向附近的相反航向上的磁场测量数据。

表2 10°与190°相反航向三分量磁场相对误差分析结果

表3 30°与210°相反航向三分量磁场相对误差分析结果

表4 80°与260°相反航向三分量磁场相对误差分析结果
3 结论
本文通过对舰船磁场特性的分析,提出了一种推算舰船任意航向三分量磁场的计算方法。在同一测量深度和测量点位置的前提下,该方法仅利用相反的两个非主航向上舰船三分量磁场实测数据,可直接计算出任意航向舰船三分量磁场,为分析研究任意航向舰船的磁特征和磁隐身性能提供了依据。实验验证了方法的可行性和准确性,该方法可推广应用于从测量地到其它区域舰船三分量磁场的推算问题。
[1] 林春生, 龚沈光.舰船物理场[M]. 北京: 兵器工业出版社, 2007: 1, 75.
[2] 张连魁. 舰船磁场分析[M]. 武汉: 海军工程学院,1991: 1-51.
[3] 马伟明, 张晓锋, 焦侬, 等. 中国电气工程大典(第12卷, 船舶电气工程)[M]. 北京: 中国电力出版社,2009: 673-684
[4] Holmes J J. Reduction of a ship’s magnetic field signatures [M]. Maryland: Morgan& Claypool Publishers, 2008: 1-3.
[5] Alexander V K, John A N. External magnetic characterization of marine vehicles[R]. West Lafayette Purdue University, 2000.
[6] 张忠龙. 舰船磁场计算与换算[M]. 武汉: 海军工程学院, 1990: 15-26.
[7] 张国友. 舰船消磁系统原理及装置[M]. 武汉: 海军工程大学, 2009: 11-26.
[8] 潘启军, 马伟明. 磁场测量方法的发展及应用[J].电工技术学报, 2005, 20(3): 7-13.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:10
航空学报(2022年5期)2022-07-04 02:24:32
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
舰船科学技术(2021年12期)2021-03-29 01:28:44
模具制造(2019年10期)2020-01-06 09:13:08
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
自动化与仪表(2019年2期)2019-03-06 08:24:26
数字通信世界(2019年1期)2019-02-14 02:00:38
电子制作(2017年24期)2017-02-02 07:14:16
舰船科学技术(2016年1期)2016-02-27 15:39:26