
大型风力机动态载荷控制方法研究
2014-03-18 07:18海几哲孙文磊吴安
机床与液压 2014年5期
海几哲,孙文磊,吴安
(新疆大学机械工程学院,新疆乌鲁木齐830049)
风力发电机组系统是一个非常复杂的强非线性流-刚-柔耦合的周期时变多体系统。整个系统在运行中振动特性是复杂的。如何利用控制技术来降低机组的载荷和振动是目前比较关注的课题,载荷过大会导致机组的强烈振动,不仅机组会产生很大的噪声,影响机组的整机运行性能,严重的会使部件因为疲劳而断裂。而控制能够提高风力发电机的能量捕捉和减少动态载荷。目前风机上采用的控制策略是传统的PID 控制,主要用在区域3 的速度调整。ROCK 等[1]利用PI 控制积极地阻碍叶片的弯曲。尽管HAND 等为风机制定了一个系统性的增益选择[2],但是这种单输入单输出设计,增益的选择比较难。传统控制算法的一个缺点就是独立循环过程中必须独立增加柔性部件的阻尼。随着风力机的尺寸和柔性变大,独立循环控制器之间的耦合自由度也随之增加,风力机运行的不稳定性也随着提高。最佳的控制器的设计是如何通过执行机构将控制系统集成到一个简单的循环中,并且能够起到降低载荷的作用。现代的控制设计方法对增益的选择是运用状态空间控制(DAC)系统,以适用于多输入多输出(MIMO)系统,达到降低载荷的控制效果。LQG 技术由BOSSANYI[3]提出,已经运用在定速风机的功率调整中了。EKELUND[4]成功地将LQG 方法运用到定桨变速风机中,而KENDALL等[5]将DAC 控制算法运用在变桨变速风机中。在风机运行过程中,周期和叶轮旋转的时间有关,目前周期性控制已用在不同的领域,包括直升机和航天器轨道优化[6],风机上的运用还是刚刚涉足。
为了说明每个零部件对整机系统的影响,需要建立一个完整的风力发电机组动力学模型,由于采用有限元法建立起的动力学模型的自由度的数目非常庞大,对计算机的硬件要求较高,而主动控制设计需要用到系统的状态进行反馈,所以用有限元建立的动力学模型不便于主动控制的设计和实现。文中采用假设模态法建立风力机线性化模型,基于状态空间控制方法,通过叶片桨距角和发电机扭矩控制减小机组运行过程中所受的动态载荷。
1 风力发电机组几何拓扑结构
建立风力机组刚柔耦合的多体动力学模型,刚体结构有基础、机舱、发电机和轮毂,柔性结构有叶片、低速轴和塔架,利用假设模态法来处理叶片和塔架的柔性特性。塔架被假设为悬臂梁,固定在基础上,有前后和左右两个模态振型,塔架的顶部支撑着偏航轴承和机舱,机舱可以随着风向转动。传动系统有发电机、齿轮箱和低速轴,机舱有一定的倾斜角,高速轴连接着发电机,低速轴连接着叶轮。叶轮由轮毂和3 个叶片组成,叶片也被看成悬臂梁,一端固定在轮毂上,每个叶片有锥角、气动变桨和扭转角度。自由度模型如图1所示[7],详细的自由度描述如表1所示。
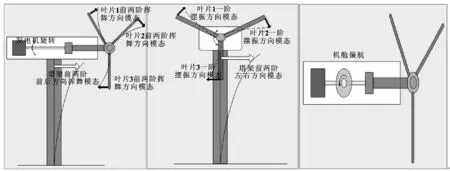
图1 自由度模型
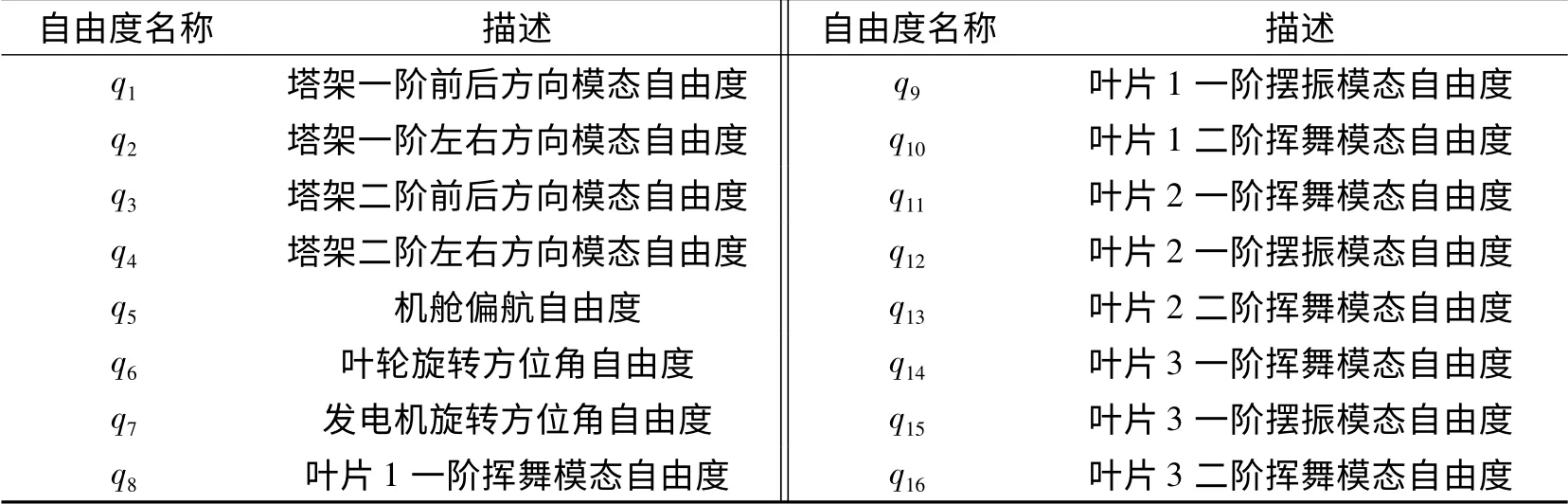
表1 自由度描述
2 五自由度模型下的线性动力学数学模型
采用假设模态法建立风力发电机组动力学模型,将非线性气动风力机模型进行线性化表示,这样可以通过建立风力机的状态矩阵将其添加到控制设计中去,也可以通过频率值的分析来决定整机系统的系统模态。线性化主要包含两个步骤:运行点的选择与线性化模型中关于运行点周期状态矩阵计算。运行点是含有系统自由度位移、速度、加速度、控制输入和风输入的一系列的值,这些值反映了风力机稳定状态的特性,是保持风力机稳定运行的关键,只有当运行点选择准确时,线性化时的输入才会接近于运行点的值。当运行点确定后,采用凯恩方法,推导建立风力发电机组的耦合方程,进行周期稳定状态矩阵的计算。
通过研究发现,考虑的机组自由度越多,机组的柔性部件越多,状态空间方程的优势越大。根据以上定义的风力机自由度模型,文中研究了基于五状态量下的控制仿真模型。五状态量的见表2。
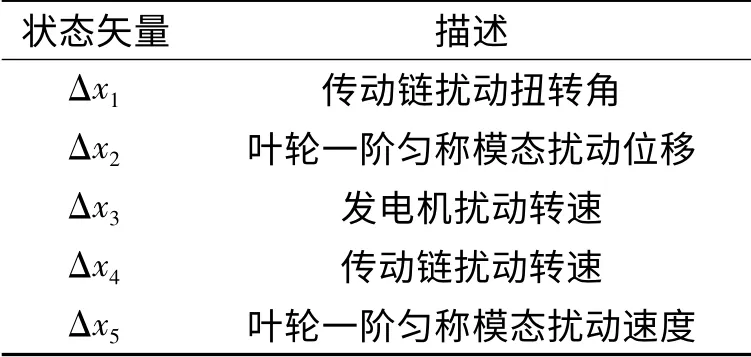
表2 状态矢量描述
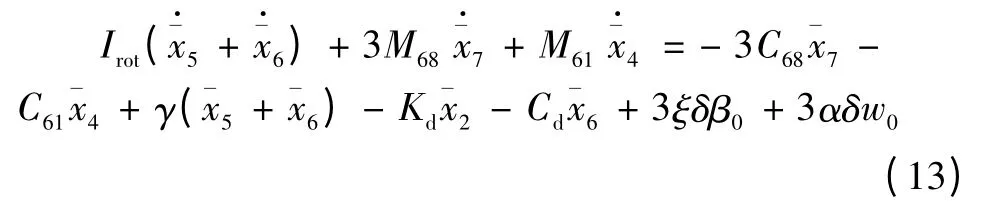
根据以上定义的自由度模型及状态矢量,写出叶轮旋转动力学方程为:

式中:Irot为叶轮转动惯量;Taero为叶轮气动扭矩;Tshaft为主轴反馈扭矩;M68为叶轮旋转自由度和叶片1的挥舞自由度的耦合质量系数;M6-11为叶轮旋转自由度和叶片2 的挥舞自由度的耦合质量系数;M6-14为叶轮旋转自由度和叶片3 的挥舞自由度的耦合质量系数;C68为叶轮旋转自由度和叶片1 的挥舞自由度的耦合阻尼系数;C6-11为叶轮旋转自由度和叶片2 的挥舞自由度的耦合阻尼系数;C6-14为叶轮旋转自由度和叶片3 的挥舞自由度的耦合阻尼系数。
在上式中,Taero是叶片1、2、3 桨距角、风速以及叶轮转速的函数:
通过泰勒级数展开,参数替代整理得叶轮旋转动力学方程为:

发电机扭矩公式为:

考虑叶片与发电机不耦合,所以上式可以写成:


统一变桨中,δTgen=0,那么

塔架一阶前后方向运动方程为:

δThrust是扰动推力。

泰勒级数展开,参数整理得:

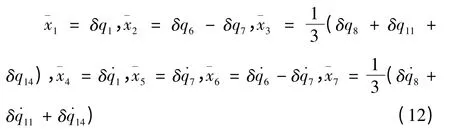
基于风力机自由度模型进行如下定义:

代入上式建立的动力学方程中,得到:

此状态空间方程中,由于建立单个叶片的动力学方程时,整个系统不可控,所以将单个的叶片坐标系转换到叶轮非旋转坐标系中去。故令:
将叶片1、2、3 转换成叶轮统一桨距角,假设其特性一样,将每个叶片上的风向量也平均化,得到叶轮非旋转坐标系下的叶轮动力学方程为:
叶轮非旋转坐标系下的发电机扭转动力学方程为:

新的塔架一阶前后方向自由度运动方程为:

那么得到叶轮非旋转坐标系下五自由度的状态空间方程为:
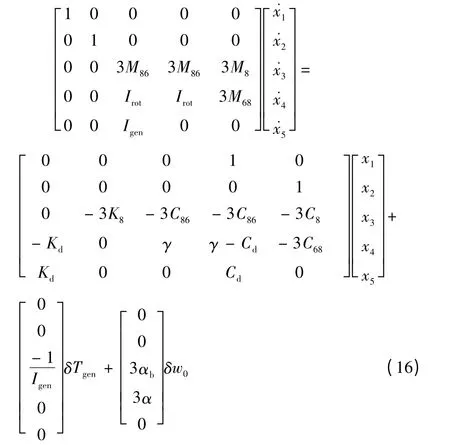
此式是针对发电机扭矩控制的状态空间方程。
3 状态空间载荷控制方法
文中采用的发电机扭矩控制主要是用在风力机运行区域3 中,主要控制目标是保持额定的功率输出,通过保持恒定的发电机扭矩和叶轮统一变桨来调整气动力矩,如果能保证发电机的扭矩和发电机转速恒定,发电机的功率也可以恒定。这里在发电机扭矩控制仿真模型中允许小范围的变动,主要目的是增加传动链的阻尼。控制输入是发电机扰动转速,外部的测量值是发电机转速,在控制模型中考虑风扰动,采用的控制算法是状态估计算法。图2 是状态评估控制器,用于发电机扭矩控制中,控制器的输入是发电机的扰动转速和测量得到的发电机扭矩,状态评估模块是通过MATLAB 编写程序运行实现的,图3 是状态评估控制模块的子程序编译流程图。发电机的扭矩值是通过状态评估模块输出乘以增益模块得到的。计算其在包含风向变化的极限连续阵风模型工况下的结构载荷,并与传统PI 控制算法来对比,实现载荷的优化。文中主要计算的载荷是塔架前后方向的载荷和低速轴扭矩(最小和最大的幅值)。图4 是五状态量模型下发电机扭矩控制仿真图。

图2 状态评估控制器
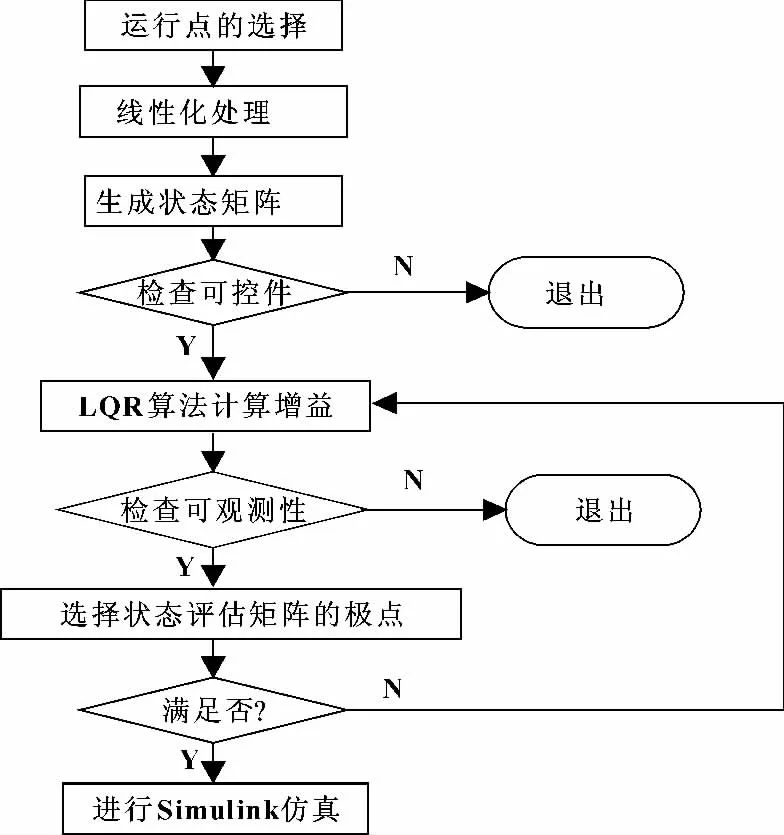
图3 状态评估控制程序流程图
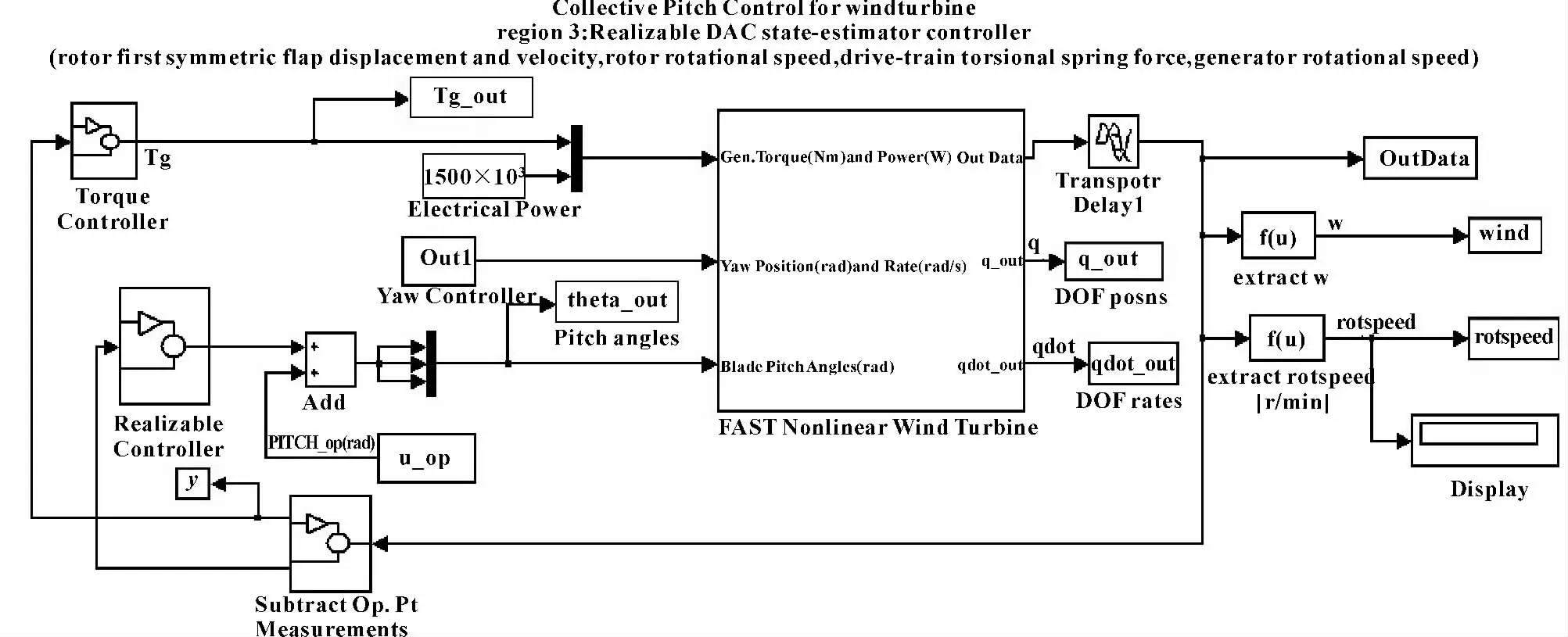
图4 五状态量模型下发电机扭矩控制仿真图
在现代控制中,全状态反馈法可以增加风力机柔性部件的阻尼,可以任意进行极点配置,单要求所有的状态量都要测出来,这在实际过程中是不实际的,而状态评估法可以通过有限测量值来估算机组的其它状态量,通过加入自适应扰动控制可以将风扰动考虑进去,采用线性最优控制可以随时调整反馈增益。
4 载荷控制仿真与分析
基于FAST 软件平台,针对1.5 MW 机型对所设计的两种载荷控制器分别进行了关键部件的载荷计算。根据IEC61400-1 规范,选择风机处于正常发电的DLC 1.4 工况进行载荷计算。通过计算结果对两种载荷控制器进行比较研究。
如图5所示,分别显示了在该设计工况下,额定风速(DLC1.4 _004 _ECD _R),低于额定风速(DLC1.4_004 _ECD_R- 2.0)和高于额定风速(DLC1.4_004_ECD_R +2.0)时的风速变化情况。可以看出:风速的方向从0°开始变化,在t=15 s 时以10 s 为一周期变化,仿真时间为60 s,风剪切在t =15 s 时开始,t=20 s 时达到最大值,然后减小到一个稳定值。相对于PI控制而言,现代控制没有包含偏航控制,因此风力机会由于偏航失正而增加载荷。

图5 不同工况下的风速变化
图6—8 是不同风速下在两种控制器作用下的低速轴扭矩仿真结果。图6 是额定风速以下时的仿真结果对比,风力机运行在区域I 里,两种控制器的作用效果是一样的:在t =20 s 时,风剪切达到最大值;在t=25 s 时风向开始改变,低速轴开始发生振动,最后保持在一个稳定值范围内。图7 和图8 是针对额定风速以上时的仿真结果对比,在风向发生改变时,现代控制相对于PI 控制可以降低低速轴载荷。
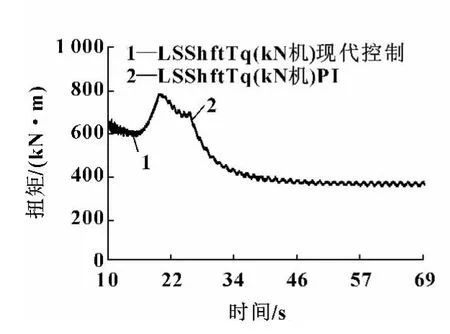
图6 两种控制器下低速轴扭矩比较(DLC1.4_004_ECD-R-2.0)

图7 两种控制器下低速轴扭矩比较(DLC1.4_004_ECD-R)
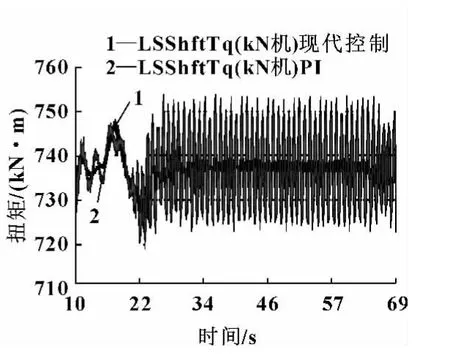
图8 两种控制器下低速轴扭矩比较(DLC1.4_004_ECD-R+2.0)
图9—11 是在该工况下塔架运动仿真结果对比。图10 是在额定风速以下时的仿真结果,两种控制器的作用效果一样。在额定风速以上时,按照前面控制器的设计,由于增加了塔架阻尼控制,从图9 和图11 可以看出:在现代控制器下,塔架前后方向的载荷相对于PI 控制载荷降低的较为明显。根据以上数据统计分析现代控制可以降低塔架载荷7.28%,降低低速轴载荷8.86%。

图9 两种控制器下塔架底部弯曲载荷比较(DLC1.4_004_ ECD-R)
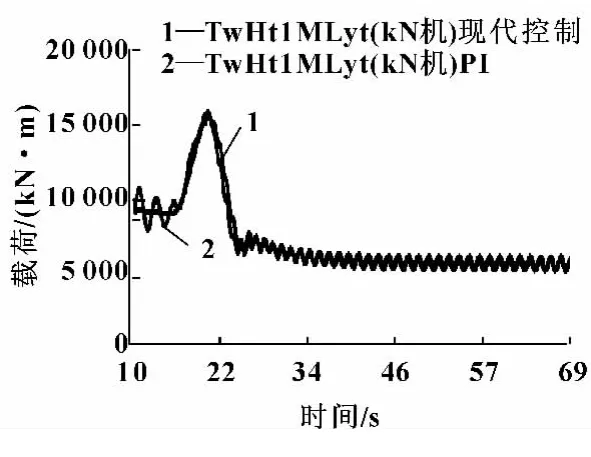
图10 两种控制器下塔底弯曲载荷比较(DLC1.4_004_ ECD-R-2.0)
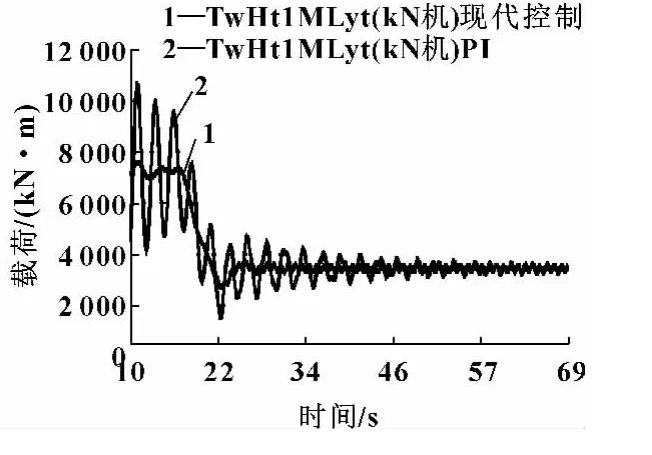
图11 两种控制器下塔底弯曲载荷比较(DLC1.4_004_ ECD-R+2.0)
5 结论
基于假设模态理论,建立了五状态量下的风力发电机组线性化状态空间控制方程,在将非线性动力学模型进行线性化处理时,采用凯恩方法,运用数学推导建立风力发电机组的耦合方程,相比较课题组之前对三状态量的研究得知:考虑的机组自由度越多,建立的模型越复杂,机组的柔性部件越多,状态空间方程的优势越大,可以通过有限测量值来控制机组柔性部件的运动。
通过两种控制器下的载荷计算结果对比:现代控制中可以通过线性最优控制调节反馈增益来调整传动链的阻尼,选择的阻尼不一样对机组的载荷影响也是不一样的;另外,通过调整塔架的阻尼也可以降低塔架在运行中受到的载荷,现代控制可以进行低阻尼下柔性模态的控制,可以减小结构动态载荷,降低机组的疲劳载荷。传统的PI 控制设计被用来调整风力发电机功率和叶轮转速,系统常常有很大的带宽使低阻尼的柔性模态不稳定,从而导致较高的动态疲劳载荷。因此,进行低阻尼下柔性模态的控制研究,减少结构动态载荷,满足风力机运行的寿命年限,有一定的理论研究价值。
【1】ROCK S M,EGGERS A J,MORIARTY P J,et al.Tradeoffs in Active Control of Aerodynamic Power and Loads on a HAWT Rotor[C]//Proceeding of the 2000 ASME Wind Energy Symposium,Nevada,2000:75-83.
【2】HAND M,BALAS M.Systematic Controller Design Methodology for Variable-speed Wind Turbines[J].Wind Engineering,2000,24:169-187.
【3】BASSANYI E A.Development in Closed Loop Controller Design for Wind Turbines[C]// ASME Wind Energy Symposium,Nevada,2000:64-74.
【4】EKELUND T.Yaw Control for Reduction of Structural Dynamics Loads in Wind Turbines[J].Journal of Wind Engineering and Industrial Aerodynamics,2000,24(3):241-262.
【5】KENDALL L,BALAS M,LEE Y J,et al.Application of Proportional Integral and Disturbance Accommodating Control of Variable Speed Variable Pitch Horizontal Axis Wind Turbines[J].Wind Engineering,1997,21:21-38.
【6】JENSEN K E,FAHROO F,ROSS I M.Application of Optimal Periodic Control Theory to the Orbit Reboost Problem[C]// Proceedings of the AAS/AIAA Space Flight Mechanics Meeting,San Diego,CA,1998:935-945.
【7】Jonkman J M,Jr Buhl M L.FAST User's Guide[R].National Renewable Energy Laboratory,NREL/EL- 500-29798,2005.
【8】何玉林,苏东旭,黄帅,等.变速变桨风力发电机组的桨距控制及载荷优化[J].电力系统保护与控制,2011,39(16):95-100.
【9】包能胜,叶枝全.水平轴风力机状态空间模型参数辨识[J].太阳能学报,2009,24(3):371-375.
【10】WRIGHT A D,FINGERSH L J.Advanced Control Design for Wind Turbines:Part 1:Control Design,Implementation,and Initial Tests[R].National Renewable Energy Laboratory,NREL/TP-500-42437,2008.
猜你喜欢
上海航天(2022年5期)2022-12-05
水泵技术(2021年3期)2021-08-14
测控技术(2018年5期)2018-12-09
制造技术与机床(2017年6期)2018-01-19
工业设计(2016年7期)2016-05-04
石油化工建设(2015年6期)2015-12-01
石油化工建设(2015年6期)2015-12-01
中央民族大学学报(自然科学版)(2015年1期)2015-06-11
航空学报(2015年4期)2015-05-07
振动工程学报(2015年1期)2015-03-01
