挖掘机混合动力系统控制器设计
2014-03-16 06:23黄中华
湖南工程学院学报(自然科学版) 2014年2期
谢 雅,黄中华,余 庸
(1.湖南工程学院 计算机与通信学院,湘潭 411104;2.湖南工程学院 机械工程学院,湘潭 411101;3.湖南工程学院 风电装备与电能变换协同创新中心,湘潭 411101)
挖掘机混合动力系统控制器设计
谢 雅1,黄中华2,余 庸2
(1.湖南工程学院 计算机与通信学院,湘潭 411104;2.湖南工程学院 机械工程学院,湘潭 411101;3.湖南工程学院 风电装备与电能变换协同创新中心,湘潭 411101)
为了实现柴油机和电动机的动态协调控制,设计了挖掘机混合动力系统控制器.控制器由功率预处理模块、油门控制模块和工作模式识别模块构成.控制器的输入参数为液压泵扭矩、液压泵转速和蓄电池SOC,输出参数为柴油机油门开度.建立了基于MATLAB的混合动力系统控制器性能仿真模型.对挖掘工况和平整工况下的控制器性能进行了仿真分析.仿真结果表明:控制器能根据载荷变换实时调整电动机的工作状态,在整个工作过程中,柴油机的工作转速基本不变.
挖掘机;混合动力系统;控制器
随着全球环保意识的增强,量大面广的挖掘机需要应对环保和节能的双重压力.传统的挖掘机节能技术主要集中在提高相关元件的性能、改进液压系统及提高动力系统与液压系统的功率匹配.传统的节能方法在一定程度上降低了挖掘机油耗和排放,但仍不能较大幅度的改善节能效果.2004年,日立建机研制了世界上首台混合动力挖掘机.此后,国内外主要挖掘机制造企业均开始了混合动力挖掘机的研制.
鉴于并联式混合动力挖掘机在结构布局和能耗方面具有优势,并联式混合动力挖掘机在国内外得到了广泛研究[1-2].动力系统控制器是混合动力挖掘机中的重要部件,直接影响动力系统的动力性能和工作能耗.
文献[3]提出了以发动机燃油经济性和电池SOC为优化变量的控制策略,该策略通过检测电池的SOC值实时调整发动机的工作点.文献[4~5]提出了发动机双模式转矩均衡控制策略,该策略以负载工况与超级电容SOC为决策依据,实现发动机工作点的自适应调节.
论文以并联式混合动力系统为研究对象,以实现柴油机和电动机的动态协调控制为目标,以液压泵扭矩、液压泵转速和蓄电池SOC为输入变量,以柴油机油门开度为输出变量,开展混合动力系统控制器设计研究.
1 混合动力系统结构
本文研究的并联式混合动力挖掘机动力系统结构如图1所示,动力系统由柴油机、电动机和液压泵组成.蓄电池用于存储电能.控制器用于协调控制柴油机和电动机的工作状态.当电动机处于电动状态时,蓄电池给电动机供电.当电动机处于发电状态时,电动机给蓄电池充电.
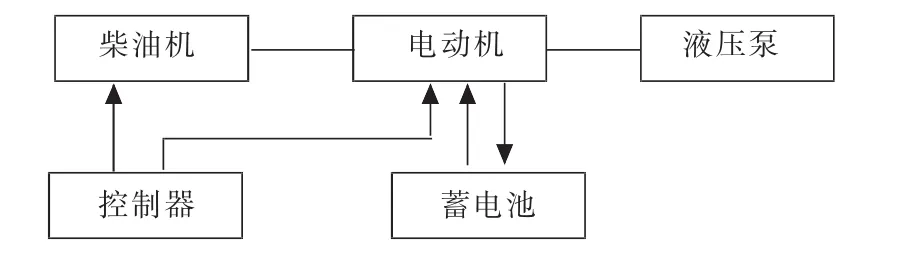
图1 并联式混合动力系统结构
2 控制器设计
2.1 控制器结构
并联式混合动力系统控制器结构如图2所示,控制器由功率预处理模块、油门控制模块和工作模式识别模块构成.控制器的输入参数有3个,分别为液压泵扭矩、液压泵转速和蓄电池SOC,输出参数为柴油机油门开度.功率预处理模块的作用是根据液压泵扭矩和液压泵转速估计动力系统的负载.油门控制模块的作用是根据动力系统的负载和蓄电池SOC计算柴油机油门的开度.工作模式识别模块的作用是根据液压泵扭矩、液压泵转速和蓄电池SOC确定动力系统的工作模式.
获取柴油机油门开度后,通过查询柴油机的工作特性曲线,可以获取柴油机的输出转速和输出扭矩.由于电动机和柴油机共轴连接,所以电动机的转速等于柴油机的转速.
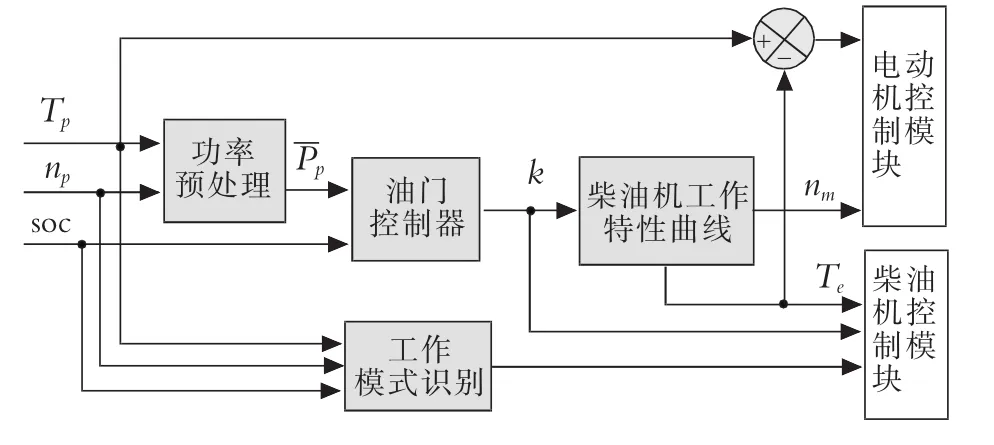
图2 混合动力系统控制器结构
2.2 油门控制模块
鉴于建立柴油机油门控制器精确数值模型比较困难,论文提出了基于模糊控制的柴油机油门控制方法.模糊控制器的结构如图3所示,模糊控制器的输入变量为动力系统负载和蓄电池SOC,输出变量为柴油机油门开度.模糊控制器采用Mamdani推理系统,输入变量隶属度函数曲线采用吊钟形,输出变量隶属度函数曲线采用三角形.

图3 模糊控制器结构
根据蓄电池的物理特性,蓄电池SOC取为0~1,0表示没有电量,1表示满电量.蓄电池正常工作时SOC取为0.5~0.7.以某型挖掘机为研究对象,实验测试该挖掘机在挖掘作业和平整作业时的平均功率需求分别为25kW和13kW.柴油机正常工作时油门开度取为0.6~1.结合挖掘机混合动力系统的工作原理,设定了如图4所示的模糊控制器控制规则.

图4 模糊控制规则曲面
2.3 工作模式识别模块
该模块的作用是根据液压泵扭矩、液压泵SOCm转速和蓄电池SOC确定动力系统的工作模式.定义为蓄电池允许工作的最小值,结合挖掘机的工作过程,设定如下工作模式识别准则:
(1)当蓄电池的SOC>SOCm,且液压泵需求功率较小时,柴油机停机,电动机单独工作.
(2)当液压泵的需求功率小于柴油机最佳输出功率时,电动机停机,柴油机单独工作.
(3)当蓄电池的SOC>SOCm,液压泵的需求功率大于柴油机最佳输出功率时,电动机辅助柴油机驱动液压泵.
(4)当蓄电池的SOC接近SOCm,或柴油机最佳输出功率大于液压泵需求功率时,柴油机将提供的多余能量通过电动机的发电作用给蓄电池充电.
(5)当液压系统需求功率为零、蓄电池SOC接近,SOCm柴油机处于最佳输出功率状态,柴油机对蓄电池充电.
(6)当液压系统需求功率为零、蓄电池的SOC>SOCm,柴油机停机.
3 控制器性能仿真
3.1 仿真模型
基于MATLAB的混合动力系统控制器仿真模型如图5所示,该仿真模型的输入参数为液压泵需求扭矩、液压泵转速和蓄电池SOC,输出参数为柴油机油门开度.

图5 控制器仿真模型
3.2 仿真分析
图6是某型液压挖掘机在挖掘工况和平整工况下液压泵的输出功率曲线,前100s为挖掘作业,接下来的50s为平整作业,两种工况交替进行.蓄电池的SOC初始值设为0.6.
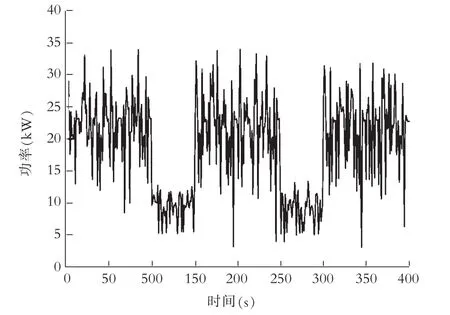
图6 液压泵输出功率
基于图5所建立的控制器仿真模型,对图6所示的挖掘机作业过程进行了仿真研究.在整个作业过程中,柴油机输出扭矩如图7所示,电动机输出扭矩如图8所示,蓄电池SOC变化曲线如图9所示,柴油机转速曲线如图10所示.从图7和图8可以看出,挖掘机处于挖掘工况时,液压泵所需要的平均扭矩由柴油机提供,电动机需要频繁切换工作状态,以补充不足的扭矩或吸收富余的扭矩;挖掘机处于平整工况时,由于液压泵的需求扭矩小于电动机的最大输出扭矩,且蓄电池SOC值大于SOCm,液压泵所需的扭矩全部由电动机提供.从图8可以看出,当蓄电池的SOC值逼近SOCm时,柴油机会对蓄电池充电,促使蓄电池SOC值迅速上升.从图10可以看出,在挖掘机的工作过程中,仅管液压泵输出功率变化幅度大,但是柴油机转速基本保持不变,确保柴油机始终工作在设定的工作点.

图7 柴油机输出扭矩
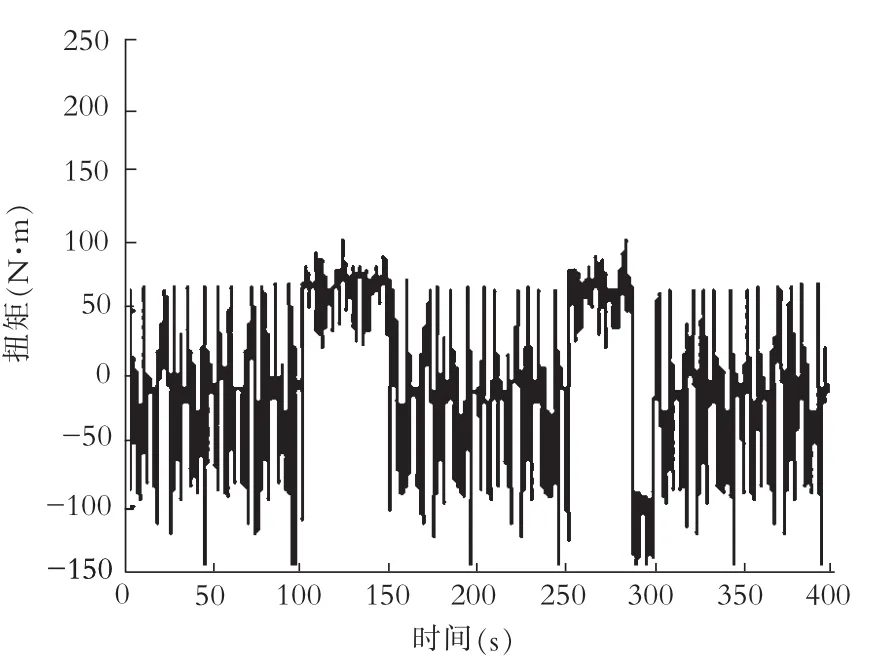
图8 电动机输出扭矩

图9 蓄电池SOC曲线

图10 柴油机转速曲线
4 结 论
以液压泵扭矩、液压泵转速和蓄电池SOC为输入参数,柴油机油门开度为输出参数,设计了挖掘机混合动力系统控制器,对挖掘工况和平整工况下的控制器性能进行了仿真分析.仿真结果表明:在整个工作过程中,柴油机的工作转速基本不变;控制器能实现柴油机和电动机的协调控制.
[1]Huang Zhonghua,Xie Ya,Deng Yi.Hybrid Excavator Shafting Torsional Vibration Analysis[J].Applied Mechanics and Materials,2013,268-270:1262-1265.
[2]何清华,刘昌盛,龚 俊,等.一种液压挖掘机并联式混合动力系统结构及控制策略[J].中国工程机械学报,2011,9(1):48-53.
[3]肖 清,王庆丰,张彦廷,等.液压挖掘机混合动力系统建模及控制策略研究[J].浙江大学学报(工学版),2007,41(3):480-483,528.
[4]刘 刚,宋德朝,陈海明,等.并联混合动力挖掘机系统建模及控制策略仿真[J].同济大学学报(自然科学版),2010,38(7):1079-1084
[5]张梅芳,宋贤云,程 珩,等.混合动力挖掘机的建模与控制策略研究[J].太原理工大学学报,2011,42(5):487-489,498.
Excavator Hybrid Power System Controller Design
XIE Ya1,3,HUANG Zhong-hua2,3,YU yong2
(1.School of Computer and Communication,Hunan Institute of Engineering,Xiangtan 411101,China;2.School of Mechanical Engineering,Hunan Institute of Engineering,Xiangtan 411104,China;3.The Cooperative Innovation Center of Wind Power Equipment and Energy Conversion,Hunan Institute of Engineering,Xiangtan 411101,China)
Controller of hybrid power system is designed to realize dynamic coordinated control.Controller is composed of power pretreatment module,throttle control module and the work pattern recognition module.Controller input parameters are hydraulic pump torque,hydraulic pump rotate speed and battery SOC.Controller output parameters are diesel engine throttle angle.Simulation model of controller performance based on MATLAB is established.Performance simulation under mining condition and formation condition is developed.Simulation results show that controller can adjust motor working status real time according to load change.Diesel engine rotate speed is almost constant during the working process.
excavator;hybrid power system;controller
TH113.1;TU321
A
1671-119X(2014)02-0026-04
2014-12-26
湖南省科技计划项目(2013GK3030);湖南省自然科学基金资助项目(14JJ5006).
谢 雅(1982-),女,讲师,研究方向:计算机仿真与控制.
猜你喜欢
现代制造技术与装备(2021年9期)2021-04-03
装备制造技术(2020年4期)2020-12-25
制造技术与机床(2019年6期)2019-06-25
通信电源技术(2018年5期)2018-08-23
石油炼制与化工(2018年12期)2018-03-21
中国设备工程(2017年6期)2017-01-21
大众标准化(2016年12期)2017-01-18
有色金属设计(2015年2期)2015-02-28
中国修船(2014年5期)2014-12-18
筑路机械与施工机械化(2014年10期)2014-03-01