太阳能最大功率机械跟踪系统的设计
2014-03-16 09:26常熟理工学院电气与自动化工程学院段志国王利豪范存海
电子世界 2014年9期
常熟理工学院电气与自动化工程学院 段志国 王利豪 范存海 吕 庭
1.引言
我国电力产业中,发电能源多以煤炭为主,面对全球能源危机以及新世纪节能环保,低碳经济的需求,清洁能源的开发与运用日益受到重视。太阳能作为一种环保、安全、分布广泛、永不枯竭的公共资源,有着无可比拟的优势并受到广大开发者的关注[1]。据测算,每秒抵达地球表面的太阳辐射能量高达8.0×1013kW,相当于550万吨标准煤燃烧产生的能量。我国的太阳能资源十分丰富,全国有2/3以上的地区年日时数在2000h以上。虽然太阳能总量很大,但由于能流密度较低,到达地面的太阳能每平方米只有1000W左右[2]。
现有太阳能光伏发电系统的太阳能板多为固定安装,而由于地球的自转和公转,太阳的入射角度时刻都在变化,对于某一个固定地点的太阳能发电系统,只有有效保证太阳能光伏电池时刻正对太阳,发电效率才会达到最佳状态[3]。为了实现跟踪太阳运行轨迹,采用光电式太阳能双轴跟踪系统,最终在方位角和高度角2个方向实现精确跟踪。
2.系统结构与实现原理
系统的机械结构如图1所示,下半部以铁架作为系统支撑,上半部为安装有太阳能光伏板的运动云台,该云台可在0~180°范围内实现2个自由度的旋转。光电传感模块必须与光伏电池平行安装,以保证跟踪太阳光源的精度。

图1 系统总框架结构

图2 系统控制原理
图2为控制部分的实现原理,以STC12C5A60S2型单片机为控制核心,利用光电传感模块实时检测东西南北四个方向的电压值,将电压值送给单片机进行数据处理得到方位信息,调节输出信号控制X轴和Y轴电机旋转从而调整电池板姿态,让太阳光线始终垂直照射于太阳能光伏板。主电路对系统进行升降压控制,充放电控制以及电路保护。系统工作的同时利用上位机软件进行远程监控,准确显示太阳方位以及电池充放电信息,提高了装置使用的实用性与便捷性。
3.太阳能最大功率跟踪系统设计
3.1 光电传感模块
光电传感模块采用光敏电阻四象限分布模式,如图3所示。首先,传感模块与太阳能电池板安装在同一平面上,4个光敏电阻朝向东西南北四个方向,因光敏电阻具有较宽的感光角度,而太阳光是散射光,为了增强传感器对太阳光角度的偏离判断能力,光敏电阻相互之间用挡板隔开,来遮盖住部分方向射来的太阳光线。
系统工作时,通过对光敏传感器的输出电压的比较,对云台姿态作如下调整:1、2号传感器控制云台的偏航转动,3、4号传感器控制云台俯仰转动,判断两个自由度的光强差,当两路电压差同时达到额定误差值0.1V时,云台停止。其优点在于跟踪精度高,工作效率高,自适应能力强,可以全天候的跟踪[4]。

表1 光伏测试数据

图3 光敏电阻分布图
3.2 主电路

图4 系统电路原理图

图5 主程序流程图
如图4所示主电路由Buck电路、充电电路、Boost电路和LED负载构成。Buck电路将光伏电池板输出电压降至5V,除了用作单片机的工作电源,也是充电电路的输入电压。充电电路以MAX1898作为控制芯片,有效管理锂电池(标称3.7V)的充电过程,尽量延长锂电池寿命。
Boost电路采用两块升压芯片FP6291,分别提供5V和6.4V两路电压输出。6.4V的电压用于驱动LED负载;仅在阴雨天或者夜晚时,需要Boost电路提供5V输出电压。这是因为在此天气条件下,太阳光强度大幅度下降导致Buck电路输出电压过低,无法让单片机正常工作,而单片机作为系统控制核心,任何条件下应该尽可能保证其正常运行,需要根据天气条件切换Buck和Boost电路的工作。本系统通过检测光敏传感器输出电压来判断具体的天气条件,如果光敏传感器输出电压大于2.5V表示光照充足,Buck电路工作提供5V输出而Boost电路不工作;电压在1.2V~1.8V判断为阴雨天,此时由Boost电路工作给系统提供5V工作电源;电压低于0.8V则为夜晚,除了提供5V输出的Boost电路正常工作以外,输出6.4V的Boost电路也工作以驱动LED负载。此外,为了保证锂电池电量不过放,系统通过采样锂电池电压,当锂电池电压低于3.5V时,控制系统进入休眠状态,切断负载供电,只保留单片机的供电,以在条件适当时唤醒整个系统进入正常工作。
3.3 闭环双轴跟踪控制程序的设计
主程序进行时,首先要对所用到的模块初始化,包括A/D模块初始化,串口初始化,以及定时器0和PCA定时器初始化,利用这两个定时器产生两路PWM波驱动两个旋转电机。初始化完成后通过光电传感器的输出电压进行昼夜判断,当电压高于2.5V时,判断为白天,当电压低于0.8V时,判断为夜晚。判断结果为白天时,太阳能光伏电池板自动转到东边初始位置,也就是太阳升起的地方,开始寻找点光源,省去多余检测时间。当寻找到初始垂直光源时,姿态保持,系统进行充电过程,5分钟后开始重新寻找光源(间隔时间可根据用户对精度的具体需求自由调整),单片机对新一轮检测数据进行处理,控制驱动电机旋转,调整太阳能板到理想姿态。系统工作的同时单片机会把东西南北四个方向的检测电压,光伏电池输出电压,光伏电池输出电流,充电电压,充电电流通过FBT06无线蓝牙串口模块传给上位机,用远程上位机对这些参数进行监测,当参数不正常时,系统会鸣叫报警。系统每隔5分钟检测跟踪一次,一直到传感器检测到黑夜时,系统停止跟踪,进行黑夜等待,等待重新出现白天,主程序流程图如图5所示。
程序控制的核心是寻找并跟踪垂直太阳光线,由此本系统设计了基于太阳能自动跟踪的控制算法如下:

式中,TH(k)是本时刻输出PWM波的高电平持续时间,TH(k-1)是上一时刻输出PWM波的高电平持续时间,QU表示电压值转换后的数字量,D为输出PWM波的占空比,EW为东西方向,SN为南北方向。此算法实现了电压差对输出信号的控制,配合A/D转换,最终实现东西光强差,南北光强分别控制两个驱动电机对偏航角度和俯仰角度的自动调节,从而达到了自动跟踪的目的,自动跟踪子程序流程图如图6所示。
4.数据处理
4.1 上位机数据采集
利用VB软件编写上位机软件对系统的运行状态及电参量进行远程监控。上位机管理控制界面控分为三大部分。第一部分为串行口设置,为了提高软件的适应能力,该软件的串行口设置部分提供了COM口以及波特率的选择,用户可以根据自己的实际情况自行选择。第二部分为位置检测,该部分是监控系统对垂直光线的跟踪情况,监测光电传感器采集的电压值,同时通过四条曲线将采集的电压值描绘出来。第三部分为太阳能板光伏电压,太阳能板光伏电流,充电电压及充电电流的监测,并且绘制充电曲线。
4.2 数据分析
数据测试时间为2014年3月27日,上午8:00到下午16:00,地点位于常熟理工学院百工楼楼顶。数据测试装置设为两组,其中一组固定安装,考虑到实地具体地理位置,太阳能光伏板正南固定安装,倾斜角设定为45o;另外一采用自动跟踪装置。测试数据如表1所示。
功率变化曲线如图7所示,从图中可以看出,采用自动跟踪装置的太阳能光伏板输出功率明显比固定安装的光伏板输出功率要高,特别是在上午8:00和下午16:00,输出功率能够提升80%左右。

图6 自动跟踪子程序流程图
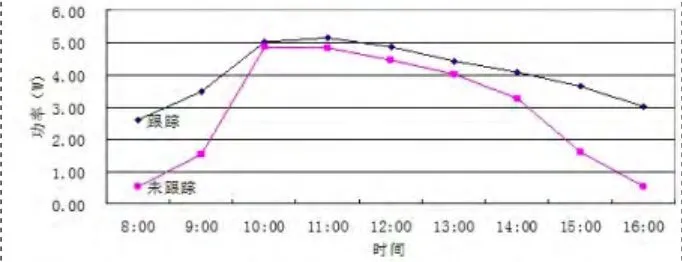
图7 功率变化曲线
5.结语
本系统针对现有的太阳能光电转换效率低的情况进行了软硬件方面的改进。系统采用了闭环控制的方案,提高了精确度,并且采用了双轴自动跟踪系统,克服了固定安装和单轴跟踪光能浪费的缺点,最大程度的利用了光能;系统主电路设计全面,充分考虑了系统在各种天气情况下的运行方案与供电,充电情况,功能完善;通过上位机进行监控,提高了系统自动化程度;系统成本低廉,运行稳定,具有实际研究意义。
[1]马帅旗,王柯,李计谋.基于MCU的太阳能最大功率跟踪系统设计[J].陕西理工学院学报(自然科学版),2013,29(5):19-20.
[2]周志敏,纪爱华.太阳能光伏发电系统设计与应用实例[M].北京:电子工业出版社,2010.
[3]丁婷婷,祝雪妹.太阳能光伏发电中跟踪控制系统的研究与设计[J].机械制造与自动化,2012,41(6):200-205.
[4]赵争鸣,陈剑,孙晓瑛.太阳能光伏发电最大功率点跟踪技术[M].北京:电子工业出版社,2012.
猜你喜欢
现代装饰(2022年6期)2022-12-17
现代装饰(2022年6期)2022-12-17
摄影之友(影像视觉)(2020年2期)2021-01-14
——以高PbI2掺杂水平的钙钛矿光阻膜、Bi2S3光阻膜、ZnO光阻膜为例
电子元器件与信息技术(2020年11期)2020-12-14
电子制作(2019年23期)2019-02-23
车迷(2018年12期)2018-07-26
山西青年(2017年8期)2017-01-31
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
学习月刊(2015年3期)2015-07-09