三阶对象的单回路和串级控制的比较研究
2014-03-16 09:26广东工业大学自动化学院王钦若黄璐璐
电子世界 2014年9期
广东工业大学自动化学院 罗 岩 王钦若 黄璐璐
1.引言
在工业生产当中,液位经常作为一个重要的参数在各个领域中有广泛的应用。比如液体贮槽、成品罐、进料罐、中间缓冲容器及水箱等其他设备。将单元操作设备所处理的物料液位限制在工艺容许的波动范围内,是液位控制系统最重要的目标[1-2]。
为了对单回路控制和串级控制的控制效果进行比较研究,本文是在THSA-1型过控综合自动化控制系统实验平台的基础上,使用西门子PLC[3]作为硬件控制平台,电动调节阀、压力传感器、模拟转换器等外围设备,运用两种控制方案,实现对下水箱液位的控制。其系统硬件设备图如图1所示。

图1 系统硬件设备图
本文中控制对象是下水箱液位,使其能够稳定、迅速、准确的达到设定值[4,5]。单回路控制系统结构简单,搭建容易,并且能够解决工业生产过程自动化中大量参数定值控制问题,很多情况下,能够满足生产工艺要求[6]。考虑到单回路控制的以上特点,首先利用单回路控制系统实现对下水箱液位的控制。
2.三阶对象的单回路控制和串级控制
2.1 单回路控制
单回路控制只是使用一个压力传感器将下水箱液位的模拟量传送给A/D转换器,转换为数字量后再反馈给调节器,通过调节器的输出来控制阀门开度,近而控制流入上水箱的流量,最终间接的影响下水箱的液位值。控制框图如图2所示。

图2 单回路控制系统框图
如图2所示,设三只水箱均为一阶惯性环节,那么三阶三容水箱的数学模型可以用下式来表示[7]:

其中,T1,T2和T3分别是上水箱、中水箱和下水箱的时间常数,K0是过程的比例系数。
2.2 串级控制
串级控制系统与单回路控制系统相比有一个显著的区别,即其在结构上多了副回路,形成了多环。串级控制系统的多用了两个测量变送器和调节器,构成了复杂控制系统,控制框图如图3所示。

图3 串级控制系统框图
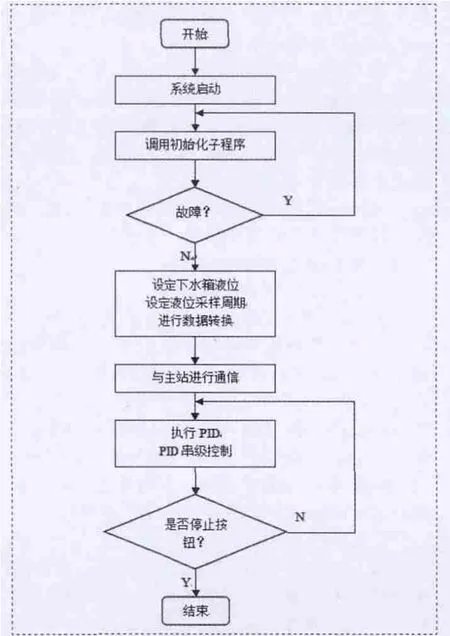
图4 程序流程框图
根据图3所示,总共有三个回路。在每一个回路中,都有一个调节器和测量变送器。三容水箱液位串级控制是通过控制上水箱的进水量,水流经过中水箱,再来控制下水箱的液位。所以把上水箱和中水箱的液位作为中间值,而下水箱的液位是最终控制对象。西门子PLC控制器的串级控制通过三个PID控制回路来实现。将主回路的输出值作为第一个副回路给定的设定值,而第一个副回路的输出值又作为第二个副回路给定的设定值即可[4,7]。
3.软件控制平台设计
3.1 主程序设计
本设计采用模块化的方法编写程序。包括程序初始化、数据转换、PID运行和数据传送四个模块。按照编程原则,建立符号表,对各个变量、网络进行详细注释。在编写程序之前,应有一个程序流程图,指导程序的编写,三容水箱液位串级控制的流程图如图4所示。
3.2 上位机界面设计
一款友好的操作软件不但需要具备强大的功能,拥有良好的可视化和动态特性,更重要的是具备开放性和扩展性。三容水箱实验系统上位机软件系统采用MCGS组态软件[8]进行开发,其组态高效、开放性及扩展性能好、运行稳定可靠、响应快。所设计的界面支持数据釆集、数据显示、数据记录和查询、报警提示等多任务的同时工作;数据查询部分允许用户选择按时间或按实验内容查询历史曲线,导出数据的EXCEL表格,进行历史曲线坐标定位工作;具有单点和多点曲线同屏显示,允许曲线实时显示、缩放、移动、打印、坐标定位等功能;可方便实现实验类型选择,算法选择和系统参数设置等功能。
4.两种控制方案的比较
4.1 无扰动时的比较与分析
首先,在无扰动的情况下比较单回路控制系统和串级控制系统对下水箱液位的控制效果。经过一系列PID参数的整定实验后,得到下面一组响应曲线图,如图5所示。
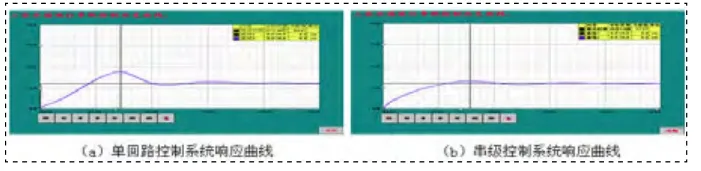
图5 无扰动下系统响应曲线图
通过比较图5(a)和(b),在串级控制下,系统响应曲线更为理想,其超调量为9%,并且达到稳态的时间小于12min,而在单回路控制下,超调量较大。
串级控制系统在增加了副回路以后,使等效被控过程的时间常数减小了,从而改善了系统的动态特性。
4.2 二次扰动时的比较与分析
然后考虑当扰动为二次扰动(扰动出现在中水箱)时两种控制方案的比较。PID参数的整定与上面类似,经过实验,获得比较满意的过渡过程曲线,如图6所示。

图6 二次扰动时系统响应曲线图
通过比较图6(a)和(b),单回路控制所得到的过渡过程曲线不理想,波动较多,不容易达到稳定状态。然而在串级控制下,虽然有超调量,但是在工艺允许的范围类,并且调节时间较短,能够快速的达到稳定状态。
当扰动出现在中水箱时,即二次扰动引入系统,其位置靠近被控参数下水箱液位,对其影响很大。单回路控制系统不能有效的克服二次扰动,因此曲线波动较大,相反,由于串级控制系统副回路的存在,能迅速克服进入副回路的二次扰动,从而大大减小了二次扰动的影响,提高了控制质量,能够达到稳定、快速、准确的控制指标。
4.3 二次扰动和三次扰动时的比较与分析
最后考虑当扰动为二次扰动和三次扰动(扰动同时出现在中水箱和上水箱)时两种控制方案的比较。过渡过程曲线如图7所示。

图7 二次扰动和三次扰动时系统响应曲线图
通过比较图7(a)和(b),单回路控制系统下,在对PID参数进行多次整定以后,系统仍然无法达到稳定状态,出现了等幅振荡的现象。而由于能够有效克服多次扰动,串级控制系统能够获得比较理想的曲线,超调量为25%,达到稳定的时间小于20min。
通过以上多组曲线的对比,不难发现,无论是存在多次扰动或没有扰动,串级控制系统都能够有效的对被控对象进行控制。这正是包含了多次扰动的副回路发挥了重要的作用,使系统改善了被控过程的动态特性,提高了系统的工作频率;对二次和多次扰动有很强的克服能力,提高了对回路参数变化的自适应能力。
5.结论
本文比较研究了三阶对象的单回路和串级控制。当扰动靠近被控对象时,单回路控制系统不能达到理想的控制效果,当扰动更加复杂时,系统甚至会不稳定。但是,对于串级控制系统来说,当干扰发生时,上水箱液位和中水箱液位将先于下水箱液位变化,将此变化的信号反馈到各自的调节器,先行改变调节阀开度,增加或减少进水量,将会使控制动作提前而改善下水箱液位的控制质量。对串级控制系统进行分析,可以发现内回路具有快速粗调的作用,外回路则起细调作用。内回路能够有效地克服二次扰动的影响,可以加大主控制器的增益,提高系统工作频率,无论扰动出现在哪个位置,都能改善控制品质。因此,串级控制系统具有比单回路控制系统更好的控制效果。
[1]曹立雪,令朝霞.基于组态软件的计算机液位串级控制系统设计与研究[J].工业控制计算机,2008,6:16-17.
[2]Cheng X.,Winn H.R.,Beveridge R.A.and Williams,J.J.Coordinated multi-stage boiler feedwater heater level optimization[J].ISA TECH/EXPO Technology Update Conference Proceedings,2001,413(2):461-470.
[3]杨后川,祖先锋,张冬冬,等.西门子S7-200 PLC编程速学与快速应用[M].北京:电子工业出版社,2010:20-38.
[4]赵丹丹,邹志云,郭宁,等.二阶双容水箱液位的串级控制[J].冶金自动化,2008,S2:1001-1003.
[5]Huang H.P.,Roan M.L.and Jeng J.C.On-line adaptive tuning for PID controllers,IEE Proceedings Control Theory and Applications,2002,149(1):60-67.
[6]邵裕森,戴先中.过程控制工程[M].北京:机械工业出版社,2010:178,165-171.
[7]Min Xu,Shaoyuan Li,Wenjian Cai.Cascade generalized predictive control strategy for boiler drum level[J].ISA transactions,2005,44:399-411.
[8]吴作明.工业组态软件与PLC应用技术[M].北京:北京航空航天大学出版社,2007:1-34,46-54.
猜你喜欢
环球时报(2020-08-11)2020-08-11
汽车维修技师(2019年7期)2020-01-16
机电工程技术(2018年10期)2018-12-06
宇航计测技术(2018年3期)2018-09-08
汽车维修技师(2018年11期)2018-05-11
中学生数理化·高一版(2017年1期)2017-04-25
汽车与新动力(2015年1期)2015-02-27
新高考·高一物理(2014年4期)2014-09-17
汽车与新动力(2014年6期)2014-02-27
汽车与新动力(2014年2期)2014-02-27