
基于无线电测向的目标搜寻系统设计
2014-03-16 09:23王彦坤张爱军
电子设计工程 2014年10期
王彦坤,张爱军,张 健
(1.南京理工大学 机械工程学院,江苏 南京 210094;2.江苏省电力公司电力科学研究院 江苏 南京 210008)
针对炮弹研制的试验条件不断完善,各种测试炮弹性能的手段基本具备。而炮弹的回收效率低下,人工寻找弹头又要花费大量的时间与精力[1],使用雷达追踪或GPS定位则方法复杂、耗资巨大,因此迫切需要设计简单廉价的弹落点定位系统。本文以弹落点定位系统为应用背景,设计了一个基于无线电通信技术的目标搜寻系统。系统采用433 MHz载波频率进行通信并找寻1 km以内的信号源目标,简单且成本较低,可靠性高。
系统还可以应用在找寻失事飞机、国防、野生动物保护等方面。目前在国内,无线电测向系统较为成熟,但应用于特殊工况下的测向系统还不十分完善,因此设计高精度的无线电测向接收机很有必要。系统集成了高精度电子罗盘、高灵敏度无线收发模块和高增益八木天线,总体设计注重实用性、可操作性和扩展性,能对目标进行快速准确定位。
1 测向原理
无线电测向有幅度比较式测向、沃特森-瓦特测向、干涉仪测向等几种方式。幅度比较式测向原理简单,体积小,成品易携带,故本文选用幅度比较式进行测向[2]。电磁波传播的时间越长,波前离发射源越远,波的能量衰减的就越多。利用波的这个特性,通过场强检测电路来测得场强的强弱[3]。
YAGI天线方向性好,增益高,适用于测向、搜寻等系统。由于受到接收机尺寸的限制,故而采用三单元YAGI天线。YAGI天线由引向器、主振子和反射器组成,主振子长度为1/2波长,引向器略短于主振子,故呈“容性”,电流超前电压90°。相反,反射器略长于主振子,故呈“感性”,电流滞后电压90°。引向器和反射器均离主振子1/4波长,因此从引向器辐射到主振子的电磁波要滞后直接被主振子接收的信号90°,与超前的90°相抵消,此时信号最强。同理,从反射器辐射到主振子的电磁波滞后直接被主振子接收的信号90°,与原来滞后的90°叠加后,信号滞后180°,此时信号最弱。因此 YAGI天线能够根据接收不同方向来波幅度的不同判定来波方向。当YAGI天线的引向器正对波源时,接收波的幅度最大,相应的场强值也最高;相反,当天线的引向器背对波源时,即反射器正对波源时,场强值最低。
搜寻者手持接收机,原地旋转一周,沿着引向器指示的场强最大方向寻找,当接收机离目标源约100 m时,场强值达到饱和,此时,打开蜂鸣器开关,沿着蜂鸣器提示的声音方向就可以找到目标源。
2 系统设计
无线电测向系统由发送机和接收机组成。目标点系统工作后,通过主控芯片控制无线收发模块间断发射无线点信号,并利用查询方式接收用户指令,当接收到指令后,启动蜂鸣器,进行声音提示,工作流程图如图1所示。
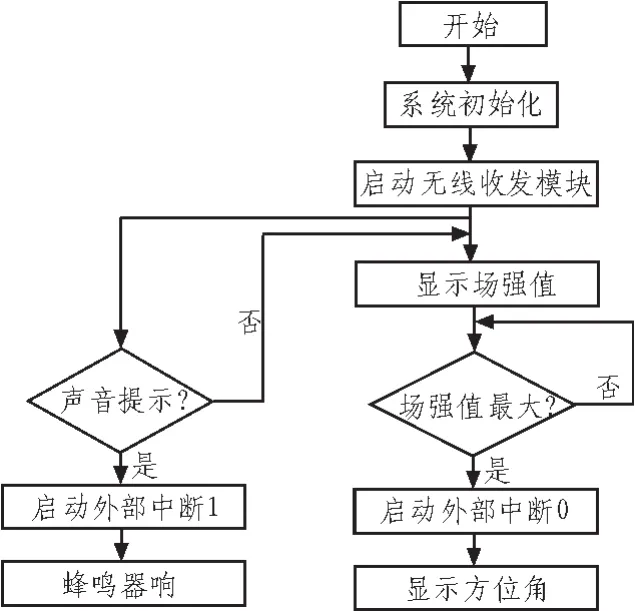
图1 系统工作流程图Fig.1 Working flowchart of the system
接收机包括主控模块、无线收发模块KYL1020L、电子罗盘XW-EC1720、电源模块、天线模块、显示模块六部分。无线电收发模块用于接收和发射无线电信号;主控模块对信号有无及强弱进行分析处理,控制显示;电源模块为接收机系统供电。接收机系统工作后,搜寻目标点系统发射的无线电信号,当搜寻到信号后,通过突出显示,并将信号进行处理,得到目标方向角并在显示屏上显示出来,当信号强度到达某一限值,接收机系统发射启动蜂鸣器指令,系统组成如图2所示。
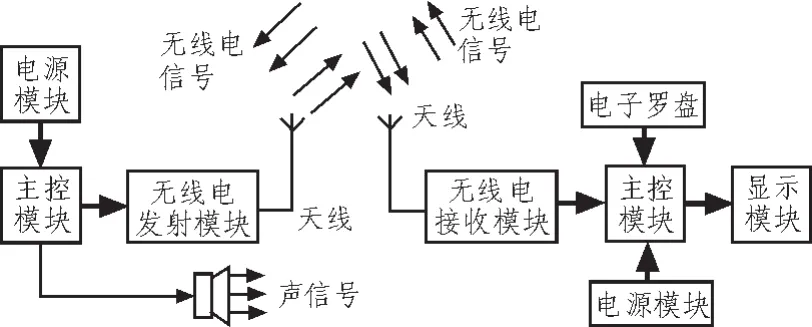
图2 无线电测向系统组成Fig.2 Wireless direction-finding system composition
主控模块基于单片机Atmega128,Atmega128是Atmel公司生产的高性能低功耗的8位AVR高档微处理器,采用先进的RISC结构,且大多数指令执行时间为单个时钟周期。1 MIPS/MHz的高速处理能力大大减缓了功耗与处理速度之间的矛盾。
2.1 XW-EC1720特性
系统选用XW-EC1720平面电子罗盘,体积很小,内置双轴磁阻传感器和双轴倾角补偿测量载体的航向角以及场强强度。电子罗盘将测得的目标点系统的方位信息通过RS232和单片机进行高效通信[4],格式为“9 600,n,8,1”,每帧输出20字节16进制数,协议如表1所示。
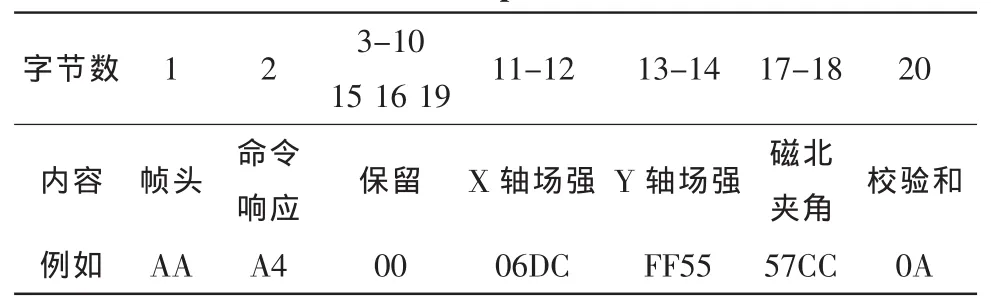
表1 罗盘数据格式Tab.1 The compass data format
主机可通过发送16进制数据的命令字来配置查询罗盘的输出参数和状态,在对罗盘进行标定时,发送命令字0xd0,在俯仰改变很小的情况下缓慢转动罗盘,转动一周后发送命令字0xd1保存校准记录。从图3可以看出,标定前罗盘的静态误差为0.5°,标定后罗盘的静态误差减少到0.25°,小于罗盘的允许误差0.5°。

图3 标定前后罗盘静态误差Fig.3 Compass static error before and after calibration
2.2 KYL-1020L模块无线通信
无线收发模块型号选用KYL-1020L,体积小、功耗低、稳定性强,传输距离可达到2~3 km。载波频率433MHz,发射功率小于500mW,接收灵敏度可达到-123 dBm(1 200 bps)。
将两块KYL-1020L分别与两台电脑通过RS232进行通信测试,分别设置两块KYL-1020L的信道号、串口速率、校验使之一致,一个通过KYL-1020L发送数据,另一个接收数据,若能够接收到发送的数据,则说明通信良好。图4为KYL-1020L与电脑接口的连接图。KYL-1020L的3和4引脚与6和7引脚都可以进行数据收发,两者是有区别的。3和4引脚是TTL电平,可以与单片机本身的串口通信引脚相连。6和7引脚是RS232串行通信接口,单片机通过MAX232芯片转换后可以与其通信。
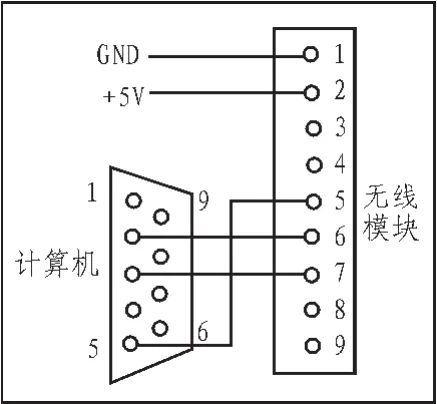
图4 KYL-1020L连接示意图Fig.4 The KYL-1020L interface diagram
当接收机工作时,KYL-1020L与单片机进行数据传递,然后通过天线发送出来。通信的数据格式如下。数据的发送是先从起始位开始,停止位在后。

表2 一个字节数据格式Tab.2 A byte data format
无线信号在传播过程中会出现损耗,分为自由空间传输损耗和反射损耗两种。“阴影效应”使波的能量随着距离的增加逐渐减少[5]。若以地波传播为主,则反射比较强烈,此时传导性越好,场强就会越小。实验场地几乎无遮挡,存在视距路径,因此无线信号波的传播方式为LOS传播。发送机和接收机天线均保持不变,以直射波为主,因此大地反射比较弱,用Egli模型能够判断场强强度。经验公式[6]如(1)所示。

又 1mil=1 609m,得到公式(2):Lm(dBm)为波传播损耗,f为信号频率。

hr、hs分别为接收机和发送机的有效高度,hmin为天线的最低有效高度,一般为20 ft,1 ft=30.48 cm,d为传播距离。
以上公式是在无遮挡的理想条件下场强和传播距离的关系,实际搜寻时会有一些误差。
3 实验与数据分析
为了验证接收机搜寻信号方位的准确性,实验场地选择在重点实验室外面空旷的大路,接收机离地约1.5m,天线与地面保持水平。每隔一段测一组数据,以罗盘为基准,每隔30°读取一次场强值。实验时波特率为9 600 bps,在每一个测试点将天线原地旋转一周,为了更好的了解每次测量时场强的最大值,用Matlab处理后得出每个测试点不同方位的场强值,如图5所示,波形的起伏能明显观察出场强的变化情况。

图5 各个角度的信号强度关系图Fig.5 Every angle of signal strength diagram
从图5可以清楚的看出0-360°方位场强值分布的整体趋势,除了第4、9组的场强最大值出现在其他方位外,场强最大值所在的方位角均在30°至60°之间。场强最小值也基本分布在与最大值相反的180°方向左右。因为选择的试验场地是径直的,所以场强最大的方位角在某个范围之内是非常合理的。而且当接收机的距离比较近且大于失效距离时,接收机天线正对发送机的方向场强值最大,随着天线的转动场强值逐渐减小,天线背对发送机时场强值最小。因此在接收机的距离比较近且大于失效距离时,接收机对各个方位的场强分辨率最大,定位效果最好。
个别场强值存在跳变以及影响场强大小的原因有以下几点:
1)实验场地虽然没有树木的遮挡,但是周围存在很多铁柱,会对磁场产生很大的干扰。实际应用时场地无此类干扰。
2)测向时操作人员的人为误差,天线不能保持水平、不能离地面足够的高度等。为了方便搜寻人员匀速转动天线,可以采用电机来控制天线的转速,这样工作人员只需水平拿着天线,让电机带动天线的匀速转动。这样对减少人为误差大大有利。
3)八木天线本身的设计存在误差,接收不同方向的非正常极化波会有很大误差。多次测量取平均值可有效减小极化误差,还有选择抗极化误差的无线电测向体制也能较好的减少极化误差[7]。
4 结 论
设计的无线电测向系统能够很好的对目标进行定位,接收机可以精确的显示各个方向的场强值和方位角。对无线收发模块可以再进一步挖掘潜力,有效提高定位距离和降低功耗。天线进一步优化后,会大大提高发送和接收增益。改变这些性能后,会使接收机适用于环境更加恶劣的场地。
[1]李丽.靶场弹落点无线定位系统的研究[D].太原:中北大学,2009.
[2]卢佳林.无线电测向技术及应用[J].潍坊学院学报,2005(4):65-67.LU Jia-lin.Wireless direction-finding technology and application[J].Journal ofWeifang University,2005(4):65-67.
[3]徐子久,韩俊英.无线电测向体制概述[J].中国无线电管理,2002(3):29-35.XU Zi-jiu,HAN Jun-ying.Overview of wireless directionfinding[J].China Radio Management,2002(3):29-35.
[4]陈文斌,杨林才,闫耀耀.基于电子罗盘的便携式定位装置[J].电子设计工程, 2011(1):99-101,108.CHEN Wen-bin,YANG Lin-cai,RAN Yao-yao.Portable positioning device based on electronic compass[J].Electronic Design Engineering, 2011(1):99-101,108.
[5]张建伟,卢泳兵.无线接入信道损耗特性分析[J].信号与信息处理,2010(2):22-24.ZHANG Jian-wei,LU Yong-bing.Research on characteristics of wireless access channels[J].Signal and Information Management,2010(2):22-24.
[6]杨国荣,史富强.微波通信天线选择与优化方法研究[J].电子设计工程,2009(10):15-17.YANG Guo-rong,SHI Fu-qiang.Research of microwave communication antenna selection and optimizationmethod[J].Electronic Design Engineering,2009(10):15-17.
[7]刘万洪,宋正来,侯小江,等.无线电通信测向中的极化误差分析[J].现代电子技术,2007(13):43-45.LIUWan-hong,SONG Zheng-lai,HOUXiao-jiang,etal.Analysis on polarization error in radio-communication direcitonfinding[J].Modern Electronics Technique,2007(13):43-45.
猜你喜欢
中学生数理化(高中版.高考理化)(2021年3期)2021-05-21
河北理科教学研究(2020年1期)2020-07-24
铁道通信信号(2019年6期)2019-10-08
电子制作(2018年19期)2018-11-14
铁道通信信号(2018年3期)2018-04-19
作文·初中版(2017年2期)2017-03-06
电测与仪表(2016年18期)2016-04-11
新闻传播(2015年9期)2015-07-18
物理实验(2015年10期)2015-02-28
物理通报(2013年11期)2013-01-12
