
滚动球窝喷管运动性能分析①
2014-03-15 06:50:44刘文芝任毅斌刘仲民庞明思赵永忠
固体火箭技术 2014年3期
刘文芝,任毅斌,刘仲民,庞明思,赵永忠
(1.内蒙古工业大学 机械学院,呼和浩特 010051;2.中国航天科工集团公司六院四十一所,呼和浩特 010010)
0 引言
固体火箭发动机滚动球窝喷管由接头、活动体、固定体及作动器等组成。接头既是活动体与固定体间的联接件,又是载荷支承件[1],由大尺寸球面(φ≥300 mm)的阴球、阳球及滚动体、支撑体等组成。系统运动中,接头内部和阴球、阳球球面在滚动体作用下产生弹塑性接触变形;支撑体对滚动体的运动起限位作用,与滚动体弹性碰撞。各构件运动状态复杂,很难了解其运动及受力、变形的真实情况,无法试验测量。
预研阶段,为检验系统结构设计和运动性能,本文提出采用单方程湍流模型,通过计算喷管内流场,得到热试车状态系统推力;用刚柔耦合多体系统动力学方法,计算系统及支撑体的的运动规律、阴球阳球与滚动体间的接触应力及变形;以实现对系统结构设计和运动性能的评估,同时为机械类固体火箭发动机推力向量控制系统研制提供更实用和可行的方法。
1 系统推力计算
发动机燃气在喷管内膨胀,并加速湍流流动,用Spalart-Allmaras湍流模型[2](式(1)),使求解流动变量的方程组封闭。
(1)

该模型只需求解一个表示湍流粘性的输运方程,在气体动力学中,对于有固壁边界的流动,用该模型计算边界层内及压力梯度较大的流动都可得到较好的结果,是相对简单的单方程模型[3]。

(2)
经计算,热试车最大入口压力为6 MPa时,系统最大推力为178.37 kN。
2 系统动力学计算
以试验测得的作动器反馈位移为原动件的运动规律;以作用在系统活动体上、由热试车入口压力计算得到的系统最大推力及活动体重量为系统工作阻力;根据系统各构件的实际联接情况,建立系统动力学模型。联系设计目标,对求解结果反复计算分析,反馈到建模过程,建立发动机滚动球窝喷管系统物理模型(图1)。
基于有限元法,阴球、阳球柔性体用离散化的若干单元的有限个节点自由度,表示其无限多个自由度,单元的弹性变形用少量模态的线性组合来表示[4-5];根据弹塑性摩擦接触有限元数值计算结果及单项承载试验结果[6],确定接头构件间的接触数组参数;采用求解速度快、规范化程度高的第一类Lagrange方程[7],建立系统刚柔耦合动力学模型。
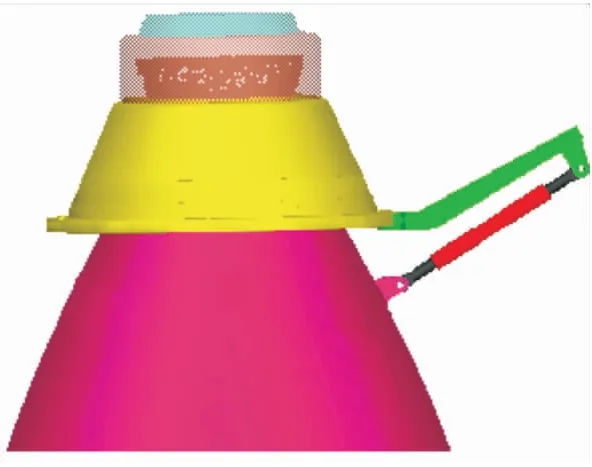
图1 滚动球窝喷管物理模型
第i个柔体或刚体的动力学方程[8]:
(i=1,2,…,n)
(3)
(4)

(5)
由式(3)、式(4),并经组装与约束方程C(q,t)=0一起构成系统刚柔耦合动力学方程:
(6)
式中q为系统全部广义坐标,q=(q1Tq2T…qnbT)T;nb为广义坐标数。
3 计算结果及分析
滚动球窝喷管摆动波形为正弦波,试验测得作动器反馈位移:
S=-Lsin(0.4πt)
(7)
式中L为作动器位移幅值;t为系统摆动时间。
3.1 运动过程
一个运动循环内,系统及接头内支撑体运动过程的动力学计算结果见图2和图3。由图2和图3可知:(1)系统摆动幅值为±5°,运动满足设计要求。(2)支撑体与滚动体间存在小的装配间隙,因此在滚动体综合弹性接触碰撞作用下,支撑体运动较理性状态滞后。在所有滚动体的综合作用下,与理想状态位移s′相比,支撑体2次位移幅值分别减小0.163、0.390 mm;位置回零时间相差0.456 s;运动周期结束时,支撑体较初始位置偏斜0.925 mm。
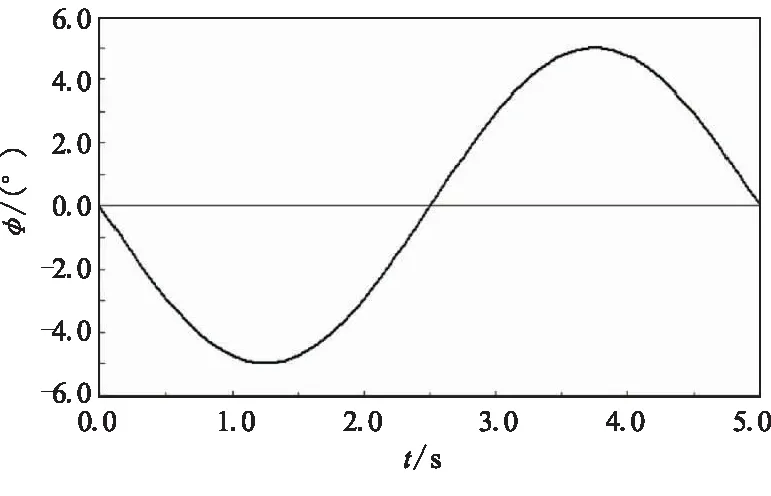
图2 系统摆角

图3 支撑体位移
3.2 接头应力
图4为接头内部,与滚动体接触位置处阳球及阴球大、小两端接触应力分布情况。

(a)接触应力分布
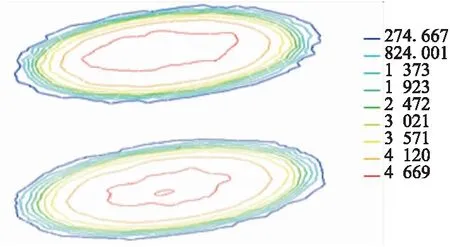
(b)接头大端接触应力分布等值线
由图4可知,受轴向载荷、摩擦及运动过程的影响,接头内与滚动体接触位置处,距入口位置较近的阳球及阴球大端接触应力大于小端;与滚动体接触位置处,阳球及阴球大端平均最大接触应力为4 669 MPa。
3.3 接头变形
阳球及阴球总体变形截面如图5所示。由图5可知,阳球及阴球总体变形最大值分别为0.168 561、0.112 593 mm。阳球总体变形大于阴球;大端变形大于小端。

(a)阳球

(b)阴球
4 结论
(1)系统总装合理,连接结构匹配,限位正确,没有干涉,各构件间具有确定的相对运动,系统运动平稳,跟随性能好;支撑体限位作用良好;满足结构设计及运动要求。
(2)接头球面应力及变形满足设计要求。
(3)计算分析结果表明,在预研阶段,滚动球窝喷管结构设计合理,运动性能良好。
参考文献:
[1] 陈汝训.固体火箭发动机设计与研究[M].北京:宇航出版社,1992.
[2] Versteeg H K,Malalasekeran W.Introduction to computational fluid dynamics the finite volume method[M].Wiley,New Yord,1995.
[3] 王福军.计算流体动力学分析——CFD软件原理与应用[M].北京:清华大学出版社,2004.
[4] Shabana A A.Flexible multibody dynamics,review of past and recent developments[M].Multibody System Dynamics 1,1997.
[5] 刘德贵.动力学系统数值仿真算法[M].北京:科学出版社,2000.
[6] 刘文芝,戴美魁,韦广梅,等.某固体火箭发动机推力向量控制系统接头接触性能分析[J].固体火箭技术,2011,34(5):573-578.
[7] 赵锡芳.机器人动力学[M].上海:上海交通大学出版社,1992.
[8] 陆佑方.柔性多体系统动力学[M].北京:高等教育出版社,1996.
猜你喜欢
空气动力学学报(2022年4期)2022-08-23 06:51:26
中学生数理化·七年级数学人教版(2022年5期)2022-06-05 07:51:46
中学生数理化·七年级数学人教版(2021年5期)2021-11-22 07:24:36
装备制造技术(2020年9期)2021-01-26 00:14:42
新世纪智能(数学备考)(2020年12期)2020-03-29 02:15:38
西安航空学院学报(2017年3期)2017-07-05 14:58:36
北京航空航天大学学报(2016年2期)2016-12-01 03:00:27
浙江大学学报(工学版)(2015年2期)2015-05-30 07:04:53
浙江大学学报(工学版)(2015年8期)2015-03-01 01:19:26
火炸药学报(2014年1期)2014-03-20 13:17:22
