
“龙”飞船完美执行第三次空间站补给任务
2014-03-14 06:16郭筱曦北京空间科技信息研究所
国际太空 2014年9期
郭筱曦(北京空间科技信息研究所)
“龙”飞船完美执行第三次空间站补给任务
郭筱曦(北京空间科技信息研究所)
2014年4月18日,美国太空探索技术(SpaceX)公司的猎鹰-9v1.1火箭升空,成功将“龙”飞船送入目标初始轨道,执行该公司第三次空间站补给任务。同时,火箭第一级在关机和级间分离之后还进行了海面软溅落回收验证试验,成为此次任务的最大亮点。随后,“龙”飞船用自身推力器提升轨道,4月20日与“国际空间站”交会,被站上机械臂捕获,停靠在和谐号节点舱上。此次任务中,“龙”飞船共向“国际空间站”运送约2268kg货物,任务持续一个月。5月18日,“龙”飞船携带1560kg系统硬件、科学货物和废物再入大气层,安全溅落在太平洋上。

猎鹰-9v1.1火箭发射“龙”飞船

“龙”飞船被“国际空间站”上的机械臂捕获

“龙”飞船安全溅落在太平洋上
1 任务背景
根据美国航空航天局与美国太空探索技术公司在2008年12月签订的价值16亿美元的“商业补给服务”合同,美国太空探索技术公司要在2016年之前为美国航空航天局发射12艘“龙”飞船,共向“国际空间站”运送20t货物。
此次任务是近13个月以来“龙”飞船的首次发射任务,遭遇数次推迟,间隔时间远超预期,而这在极大程度上已超出美国太空探索技术公司的控制范围。
2 运输系统及任务方案
运载火箭升级,加装着陆支腿
猎鹰-9v1.1是美国太空探索技术公司自主研制的两级入轨运载火箭,以其v1.0型号为基础,提升了有效载荷容量和可靠性,通过改进工艺而进一步降低了发射成本。它与猎鹰-9v1.0之间的主要差别是将第一级所用的灰背隼-1C发动机更换为动力更强大的灰背隼-1D发动机,第一级采用全新的发动机布局并加长第一、二级的推进剂贮箱。猎鹰-9v1.1火箭高68.4m,直径3.66m,发射质量500t。火箭的近地轨道有效载荷能力可达13150kg,地球同步转移轨道有效载荷能力为4850kg。

猎鹰-9v1.1技术参数
灰背隼-1D设计简化了不再需要的子组件,在制造流程中采用改进工艺和质量控制手段,使美国太空探索技术公司每年能生产更多台发动机,同时降低风险。原本在燃烧室上电镀镍钴合金作为防护层,用于承受此压力容器的主应力,现由爆炸成型的金属外壳替代。这些改动延长了灰背隼-1D的疲劳寿命,并增加了燃烧室和喷管的热余裕。此外,该发动机可在额定性能的70%至100%范围内调节推力,而灰背隼-1C不具备推力调节功能。灰背隼-1D成为迄今全球推重比最高的液体燃料发动机,超过设计要求的150。
灰背隼-1D布局是另一项重大改动。猎鹰-9v1.0采用3×3“井”字布局,而猎鹰-9v1.1则采用八角形布局。8台灰背隼-1D发动机排成一圈,环绕1台位于中央的发动机,中央这台发动机安装上略低于其他发动机。这种新布局避开了过热点,提升了热特性。

猎鹰-9v1.1第一级发动机布局
与猎鹰-9v1.0相比,猎鹰-9v1.1第二级具有加长型推进剂贮箱,由单独一台灰背隼-1D真空发动机供以动力,是针对真空运转加以优化的灰背隼-1D发动机,具有扩张比更高的喷管。发动机支持多重点火,能实现多种轨道和轨迹。该火箭的第二级还容纳航电设备和飞行计算机,猎鹰-9v1.1做了很多改进。其全部航电设备和控制器都由美国太空探索技术公司内部制造,系统完全冗余,不断进行自检以验证所有制导导航与控制部件运转正常。为降低成本,美国太空探索技术公司采用耐辐射的商用现货零件,而不是抗辐射设计。航电设备为三重冗余设计,火箭的惯性导航系统叠加全球定位系统(GPS),额外提供入轨精度。
飞船
“龙”飞船装备有18台“天龙”(Draco)推力器,分为四个吊舱,其中两个吊舱各包含5台“天龙”推力器,另外两个各包含4台“天龙”推力器。此小型火箭发动机由美国太空探索技术公司设计、研制和试验,每台可提供400N推力,用于在轨机动、姿态控制和长时间离轨点火,燃烧时间可变。“天龙”推力器使用四氧化二氮/甲基肼作为推进剂,任务过程中共消耗1290kg飞船携带的推进剂。“龙”飞船的反作用控制系统在所有轴上提供双冗余。任意2台“天龙”推力器失灵都不会影响任务。
“龙”飞船乘员舱的防热罩要在再入过程中承受1600℃高温。
飞行方案
猎鹰-9火箭的9台灰背隼-1D发动机点火3s后火箭升空,升空17s后火箭速度达到马赫数1,在升空后83s时刻穿过最大动压力区域。第一级燃烧持续2min41s,关机3s后级间分离,随后第二级点火,燃烧持续6min55s。起飞10min后,船箭分离,“龙”飞船顺利入轨,随即抛离太阳电池翼整流罩、展开1对太阳电池翼。
“龙”飞船在起动自身推进系统时遭遇故障,飞船上一个隔离阀没有响应,使一部分推力器组无法自动启用。美国太空探索技术公司任务控制人员查看情况后开始了切换至备用隔离阀的程序。此次飞行中出现的问题很可能与2013年3月第二次空间站补给任务中的无关,当时“龙”飞船推进剂加压系统内的止回阀故障,导致4个推力器吊舱中的3个无法正常工作。
这一次,美国太空探索技术公司任务控制人员迅速解决了问题,但任务的一部分先期操作向后顺延了,但对交会进度没有影响。从近地点313km/远地点332km轨道出发,“龙”飞船在发射后、捕获前的两天内进行了一系列轨道调整和调相机动。所有点火都按计划执行。抵站当天稍晚时候,“龙”飞船开启舱门,暴露出“龙眼”导航传感器组和抓固器。

“龙”飞船技术参数
在捕获前5h,飞船进入空间站周围28km的通信区域,与空间站之间建立起超高频直接链路。飞船使用邻近通信链路作为与空间站的相对GPS通信。“龙”飞船利用绝对GPS进行高度调整点火与共椭圆机动点火,到达距空间站2.5km处,美国太空探索技术公司与美国航空航天局任务控制中心之间开始联合运行,飞船随后从绝对GPS切换至相对GPS。作为交会相对GPS阶段的一部分,“龙”飞船接收来自空间站的GPS数据,与自身GPS数据相比较,计算出相对位置、速度和运动。在接近空间站的过程中,“龙”飞船可执行多次中程修正点火。站上乘员从距离1000m时开始持续监视“龙”飞船,准备在必要情况下采取措施。
两次中程修正后,“龙”飞船在距空间站350m处执行一次180°的偏航机动,将其头锥指向正确方位,以在发生意外时进行航向推进中止点火将飞船迅速推离空间站。再接近100m后,“龙”飞船自动进入“位置保持”模式,在此完成激光雷达和热成像仪的最后调整和验证。距空间站200m时,“龙”飞船进入空间站阻进区域,在此到访飞行器必须满足最高级别的安全性要求。从250m缓慢进近到30m,“龙”飞船再次悬停,任务控制人员再次进行系统评估决定是否执行最后接近。“龙”飞船非常缓慢地接近空间站,随后停在距空间站10m的捕获点。证实飞船处于恰当姿态后,飞船所有推力器关机,开始自由漂移。具体捕获时间由光照条件决定。
控制加拿大臂-2的站上乘员通过机械臂上的自锁型末端执行器相机跟踪“龙”飞船的抓固器。捕获后机械臂执行一系列动作,然后将“龙”飞船停靠在和谐号舱天底的通用停靠机构上。
3 任务最大亮点:火箭第一级完成软溅落试验
此次发射“龙”飞船第三次空间站补给任务的猎鹰-9v1.1火箭实现了一个重大里程碑,其第一级成功软溅落在大西洋上。
该火箭第一级在点火升空后2min43s时刻分离,此时高度为80km,马赫数10。分离后不久,第一级用自身的冷气姿态控制系统转向发动机前置姿态,使用其9台灰背隼-1D发动机中的3台进行制动机动。3台发动机点火,在再入之前减慢箭体速度,确保箭体能承受再入。到升空后8min25s时刻,第一级已完成其再入点火,团队开始接收来自第一级的遥测和视频数据。遥测数据实时传输给位于卡纳维拉尔角的TEL-4地面站,一架美国太空探索技术公司飞机开始在大西洋溅落区域上空盘旋。
随着箭体高度降低,从卡纳维拉尔角看已逐渐消失在地平线下,造成预料中的信号丢失。飞机记录遥测数据供以后回放用,对关键的第一级着陆机动没有实时观测。
信号丢失前最后一个数据点的信息为第一级速度360m/s,高度8.5km,滚转角速度接近零。马斯克认为最后一点非常重要,因为去年九月猎鹰-9首次溅落试验的时候曾出现滚转角速度过高,滚转无法控制,导致中央发动机的着陆点火缩短,因为推进剂受离心作用,破坏了贮箱导流板进而引起碎片进入发动机。此后团队对第一级姿态控制系统进行了改进,使其在穿过大气层的飞行过程中更好地处理滚转角速度并有效降低滚转率。此外,美国太空探索技术公司希望着陆支腿能额外增加箭体的稳定性,在最后点火过程中抑制滚转。
在再入过程中,第一级有望因重心低(燃料几乎空箱、发动机较重且在尾部)而保持稳定姿态飞行。一旦垂直下落并接近海面,猎鹰-9将点火中央发动机执行不到10s的最后着陆燃烧。随着支腿展开和发动机点火,猎鹰-9将假装海面是硬地面,随后在大西洋实施软溅落。
该火箭第二级到达目标轨道时,第一级预计将接触海面,因数据需传回、分析,最终结果确认需要花费数小时。计算机在接触海面后持续发送数据直到第一级落回水平位置的事实证实第一级已成功软溅落。
起初,美国太空探索技术公司估计第一级完整回收的成功率在30%~40%,因为第一级着陆尝试主要用于收集数据,为今后任务改进控制程序;另一个促成成功概率微小的因素是当天回收海域天气恶劣,7m的浪高阻止回收船靠近着陆区域,在第一级最后着陆机动过程中也可能会造成一些麻烦。尽管如此,美国太空探索技术公司仍设法让火箭第一级直立降落于海面,随后骇浪损毁了箭体。美国太空探索技术公司回收了部分碎片,并拍摄了软溅落过程视频。火箭第一级成功着海是一个重要里程碑,标志着美国太空探索技术公司已达成猎鹰-9第一级助推返回能力的又一块基石。
按美国太空探索技术公司的说法,标准猎鹰-9火箭的发射成本目前为5000万~6000万美元,推进剂本身的成本仅为其中的0.3%。如果能重复使用,火箭的资本成本则能降至1%。根据2014年繁忙的研制计划,伊隆•马斯克称,有望在2014年底或2015年初实现火箭第一级的首次地面软着陆,然后开始着力实施第一级的快速重用。
4 特色货物
作为首艘由猎鹰-9v1.1火箭发射的“龙”飞船,除满载1520kg加压货物外,还有2台外部有效载荷和众多内部物品。
“龙”飞船装载了1台G L A C I E R和2台MERLIN实验室冷冻箱,用于向站上运送科学样品,并将返回2台GLACIER和在轨获取的珍贵样品。针对站上进行的多项实验/试验,此次任务的特色货物还包括高清晰度对地观景(HDEV)装置、激光通信光学有效载荷(OPALS)、蔬菜生产系统(VEGGIE)以及将给站上第二代“机器人航天员”安装的一对机械腿。
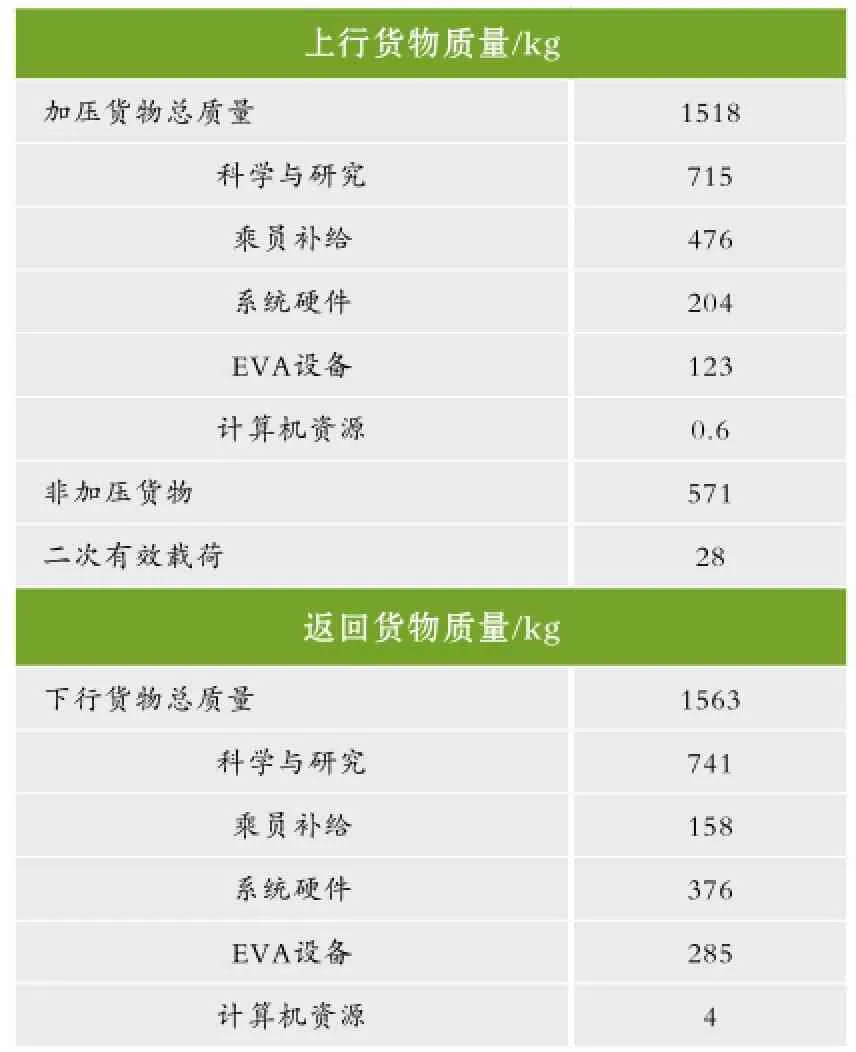
货物质量分配
高清晰度对地观景有效载荷
高清晰度对地观景有效载荷由4台市场可购的相机组成,将在近地轨道环境使用和下传地球高清影像的过程中接受评估,可由科学家用于多种领域,也可通过在线直播平台向公众发布。所有高清晰度对地观景硬件都封装在外壳中,内充干燥氮气保持大气压力。这四台相机不具有云台功能,每台相机都有固定视场。高清晰度对地观景有效载荷的主要目标是在空间环境中评估相机的长期性能,将有助于针对未来空间任务选择商业部件。
激光通信光学有效载荷
通过从站上向位于J P L光通信望远镜实验室(OCTL)的地面接收机传输视频文件,激光通信光学有效载荷将演示验证光通信技术在近地空间任务数据传输中的性能。
高清晰度对地观景和激光通信光学有效载荷已相继由加拿大臂-2和“灵巧专用机械手”安装在空间站外部,公众现可在线观看高清晰度对地观景拍摄并传回的地球实时影像。
蔬菜生产系统
蔬菜生产系统是一种可展开的植物生长装置,用于在站上验证“太空花园”的可行性。试验设施提供照明和养分供应,可支持栽培多种植物种类,将在乘员食用之前进行收割和研究。热控制由站上舱内系统提供,而植物生长所需的二氧化碳源则是站上的环境空气。装置质量为7.2kg,允许的最大生长高度为45cm。测试物种为莴苣,将在两种尺寸的煅烧粘土介质中栽培,以比较两种介质区域中根系分布的情况。在太空中种植植物为乘员提供了新鲜食物,可补充饮食并对精神面貌和身体状况产生正面影响。
“机器人航天员”的腿
在轨工作3年后,“机器人航天员”终于要有“腿”了。每条腿有7个关节以及1个充当脚的末端执行器,用于抓住空间站内外部的扶手。末端执行器还包括指引机器人接近和抓紧扶手所需的视觉系统。“机器人航天员”仍处于站上初期测试阶段,而腿对于拓展测试活动而言是有益补充。

高清晰度对地观景相机拍摄的地球高清实时影像
整件舱外活动航天服
此次“龙”飞船承担了航天飞机退役后首次运送整件舱外机动装置(EMU)往返于空间站的任务。尽管进步号、“自动转移飞行器”、“H-2转移飞行器”和“天鹅座”飞船都已用于运送EMU硬件,但都没有运送过整件航天服。“龙”飞船运送的是舱外机动装置-3003及其全部主要部件:硬式上肢组件、基本生命保障系统、头盔、下肢组件及可替换硬件,包括手套和其他设备。为运送舱外机动装置,“龙”飞船内部安装了一个特制机柜。
除上述货物外,第三次空间站补给任务还运送了包括5颗立方体卫星在内的二次有效载荷。这些立方体卫星由安装在火箭第二级上的4台“多微卫星轨道部署器”(P-POD)释放,在船箭分离后不久部署在近地点315km、远地点325km的轨道上。
5 结语
第三次空间站补给任务是美国太空探索技术公司“龙”飞船的第五次飞行任务,继2010年12月首次短暂试飞成功后,在2012年5月完成验证飞行任务,并先后于2012年10月和2013年3月完成两次正式商业合同任务。第三次空间站补给任务成功表明美国太空探索技术公司的货运飞船及运载火箭技术已稳定成熟,同时正大力开发可完全重用的火箭技术。
美国太空探索技术公司和美国航空航天局今年计划共发射三艘“龙”飞船,,2015年发射四艘,2016年发射最后一艘。但根据此次任务遭遇的各种推迟判断,后续进度也会受到影响。
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
空间控制技术与应用(2021年1期)2021-04-25
军民两用技术与产品(2021年10期)2021-03-16
军民两用技术与产品(2021年12期)2021-03-09
航天工业管理(2020年3期)2020-07-25
太空探索(2020年5期)2020-05-19
航天器工程(2019年1期)2019-03-06
太空探索(2016年12期)2016-07-18
太空探索(2016年5期)2016-07-12
太空探索(2016年2期)2016-07-12
