基于PSD 的微位移测量系统研究
2014-03-13 07:02:46王帅帅祝连庆周维虎董登峰周培松
电子科技 2014年6期
王帅帅,祝连庆,周维虎,董登峰,周培松
(1.北京信息科技大学 仪器科学与光电工程学院,北京 100192;2.中国科学院 光电研究院,北京 100094;3.合肥工业大学 仪器科学与光电工程学院,安徽 合肥 23009)
激光跟踪仪系统是建立在精密角度测量和激光干涉长度测量基础上的一种极坐标测量系统,其具有方便、动态、快速、测量精度高等优点,在航空航天航海、机械加工制造、现代军事科技、核工业技术等高精度测量领域发挥了重要作用。
激光跟踪仪,如图1 所示,其具有合作目标——跟踪球,跟踪头发出的测量光束入射到跟踪球,经反射折返回跟踪头。当目标移动时,跟踪头需自动调整测量光束方向,确保始终对准跟踪球。
能否实时快速准确地跟踪跟踪球,决定了跟踪仪的跟踪速度和精度。位置敏感探测器(Position Sensitive Detector,PSD)具有位置分辨率高、响应速度快等特点,主要应用于高精度、高灵敏度的位移、角度、同轴度的非接触测量与校准领域,并逐步取代四象限探测器而成为跟踪系统中主要的位置反馈器件[1]。
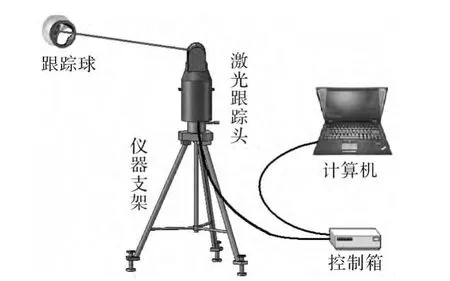
图1 激光跟踪仪测量系统
目前,瑞典、美国、日本等国在PSD 探测器的研究处于领先水平,且有较成熟的产品,但价格昂贵。国内近年来也对基于PSD 的微位移测量系统进行了大量研究,但距大规模商品化应用仍有一定距离[2]。本文设计的基于PSD 的微位移测量系统,消除了背景光光电流对测量结果的影响;采用双线性插值算法修正PSD 测量的非线性误差,提高了测量精度。实验结果表明,该测量系统具有响应速度快、测量精度高等优点。
1 PSD 的横向光电效应
PSD 是一种基于横向光电效应的非分割型光电二极管,根据光敏面上接收到光信号转变为电信号的变化来检测光点位置。与象限探测器及CCD 不同,其由一个完整的光敏面构成。PSD 可分为一维PSD 和二维PSD。一维PSD 测量光点一维坐标,二维PSD 测量光点二维坐标。二维PSD 根据电极结构不同可分为四边型、两面分流型和枕型。
二维PSD 是在一维PSD 的基础上改进的,其基本原理相同。由P、I、N 3 层组成,P 层是感光面,两对对边中心各引出一个信号输出电极;中间插入较厚的I层,提高光电转换效率,增强灵敏度和响应速度;N 层引出一个公共电极,加调节反偏电压。两个电极间接一负载电阻,当光照射在PSD 光敏面某一点时,在横向电场作用下产生正比于光能量的电子——空穴对流过P 层电阻,分别从设置在P 层的4 个电极上输出光电流I1、I2、I3和I4[3]。假设P 层电阻是均匀的,则电极输出的光电流反比于入射光光点位置到各电极之间的距离。坐标原点选在PSD 几何中心,根据输出光电流计算光点坐标的方程为
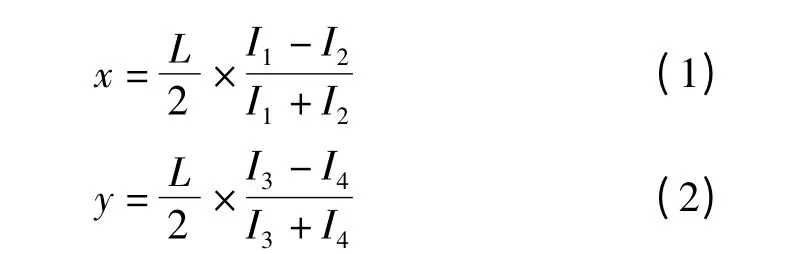
式中,L 是PSD 几何中心到信号输出极间的距离[4]。
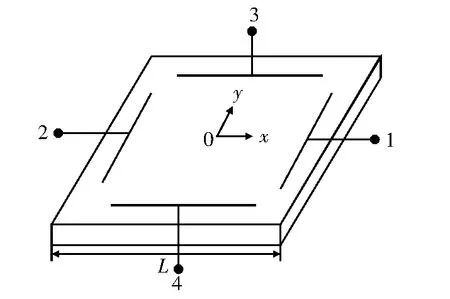
图2 二维PSD 结构图
2 测量系统的设计
2.1 测量系统总体设计
激光器发出的测量光束经一系列光路后照射到PSD 探测器表面上,PSD 由于横向光电效应产生光电流信号,经I/V 转换电路,并滤波以降低噪声干扰,经二级放大输出至A/D 芯片转换为数字信号。单片机对A/D 实现通道控制与信号采集,并对采集到的数据信号进行处理,得到PSD 上光点的位置坐标,并在上位机上实时显示。系统结构框图如图3 所示。
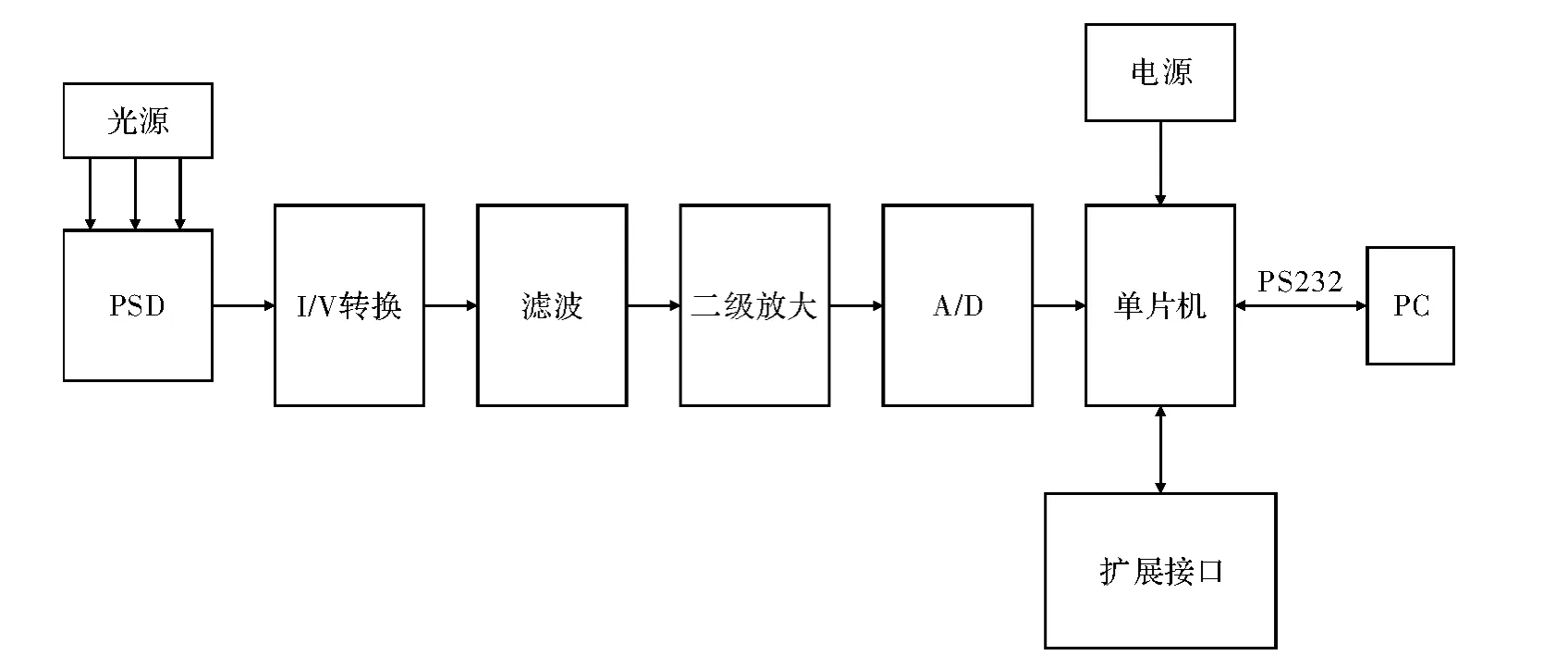
图3 系统结构框图
PSD 探测器表面受到激光照射,输出微弱的电流信号,需对其进行处理才能获得光点中心坐标。整个测量系统分为信号处理和数据采集两部分。
2.2 信号处理单元
本系统的信号处理单元包括I/V 转换、滤波、二级放大电路3 部分。由于PSD 输出的信号较弱,且是电流信号,通常只有几μA 到几十μA,难以直接进行处理,故需先进行I/V 转换。
为保证精度,必须选用输入阻抗大、偏置电流和噪声较小的运放,这样才能有效地提取信号,抑制噪声。因此,前级I/V 转换放大电路采用LM324。LM324 是一款低噪声带差动输入功能的四运算放大器,其偏置电流最大为100 nA,足以检测μA 级PSD 芯片的输出电流。在跨阻放大电路的反馈电阻处并联一个电容,满足1/(ωC)>R 时,可限制带宽降低高频噪声,同时RC 形成一个超前环节,对相位进行补偿,提高了电路的稳定性。
经I/V 转换后送入二阶低通滤波电路,设定截止频率,降低干扰及部分噪声。因信号放大倍数较大,故采用二级放大电路,以提高增益的稳定性,最终获得满 足A/D 输入幅度的信号。
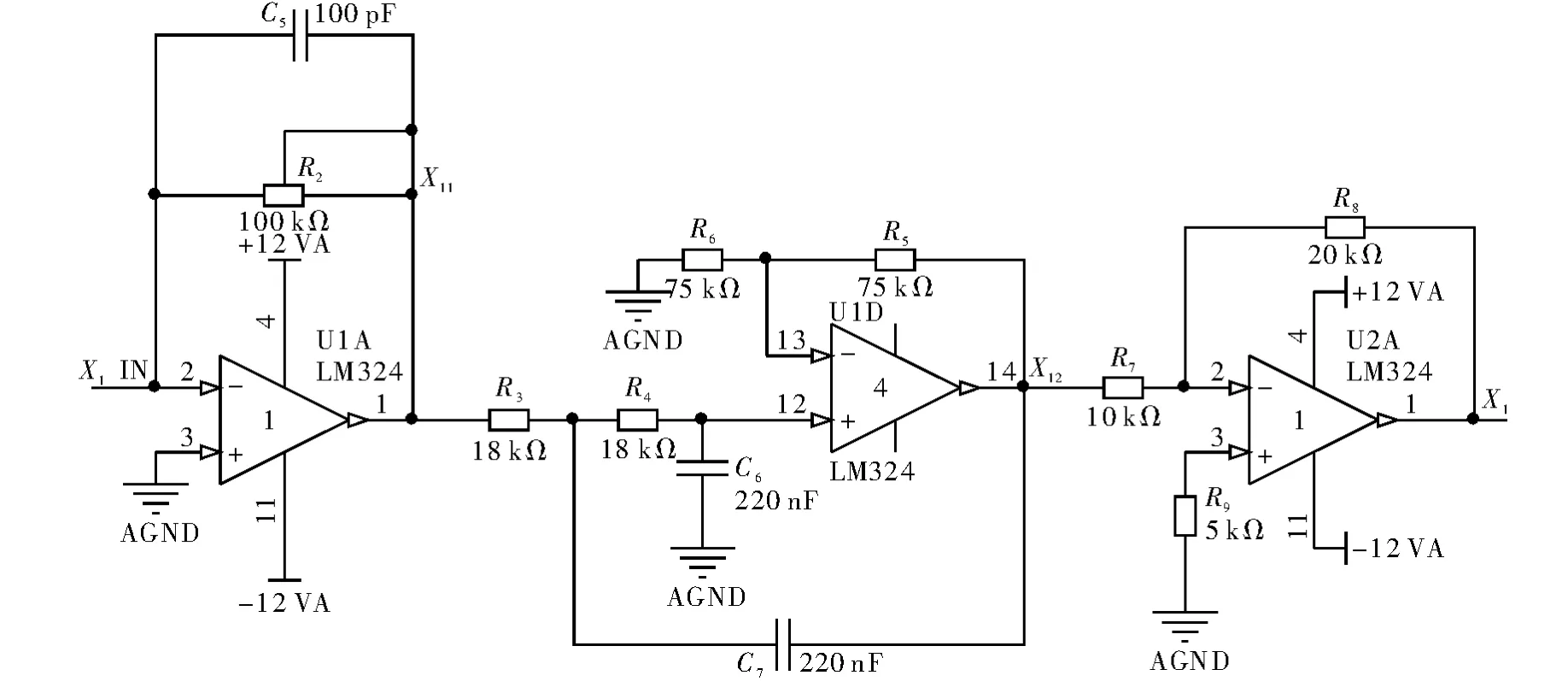
图4 信号处理单元原理图
2.3 数据采集单元
信号处理电路输出的是模拟信号,先进行A/D 转换,然后进行数据处理。ADS7864 是TI 公司生产的12位、500 kHz 高性能模数转换器,具有3 对6 条全差分输入通道,可同时对其中的1 ~3 对输入通道进行高速同步信号采集。片上自带2.5 V 基准电压源,可用作A/D 的参考电压。在频率为500 kHz 时仍可提供80 dB的良好共模抑制比,这在高噪声环境中非常重要。ADS7864 的6 通道同时采集,适合PSD 探测器的4 路光电信号,余下的2 个通道作冗余备份。
为获得入射到PSD 表面上光点的位置坐标,需将PSD 的4 路输出信号按式(1)、式(2)进行加法、减法、乘法和除法多种运算。若采用传统的处理方式,即用运算放大器搭建加、减法电路,用模拟乘法器构成除法器,将必然带来噪声干扰信号,模拟器件固有的温漂特性也会引入测量误差。为解决这一问题,系统采用软件编程、数字处理的方法实现逻辑运算,当A/D 的分辨率足够高时,从根本上消除干扰信号影响,达到要求的运算精度,且这样也有利于后续接口的控制与处理,以便得到光点的位移量。
2.4 软件设计
软件设计采用自顶向下、逐步细化的模块化设计,其结构清晰、层次分明。程序设计流程如图5 所示。首先,无激光照射时对处理器进行初始化,根据A/D采样时序,启动A/D 转换,采集暗电流和背景光的4路输出值并保存。激光照射PSD 后,采集到PSD 的4路输出值减去保存的暗电流和背景光的输出值,计算出光点位置X、Y。为方便操作与直观的显示坐标,并实时记录数据,通过RS232 串口与上位机实时通信、显示。
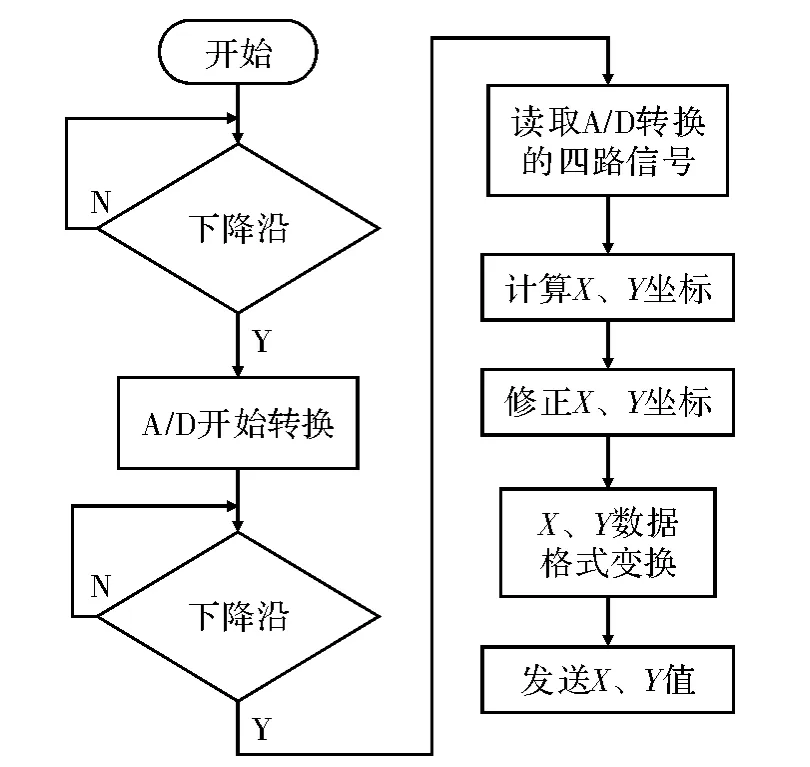
图5 算法流程图
3 误差处理
在测量中除了入射光点外,还有其他背景光作用在PSD 表面上干扰系统的正常测量。背景光照射在PSD 上一般呈均匀的光强分布,等效于一个光点作用在PSD 几何中心。此时PSD 的输出信号等同于入射光(x0,y0)和背景光(xb,yb)叠加共同作用的结果,入射光单独作用时PSD 第1、2 路输出的总电流为I0,背景光单独作用时PSD 第1、2 路输出的总电流为Ib,令K=I0/Ib。
由式(1)解算出的x 坐标位于两光点的连线上,比真实坐标靠近PSD 器件中心[5]

同理

为减小背景光对PSD 精度的影响,提高测量精度,有以下几种方法:加滤波片、交流调制、提高入射光强与背景光强之比等。交流调制是在入射到PSD 前进行调制,接着对PSD 输出的信号解调,增加相应的处理电路即可实现对背景光的滤除。背景光大多数为照明光或自然环境光,特点确定,故其导致的干扰输出也是确定的,对位移测量的线性度并无影响。可在测量前,采集背景光单独作用于PSD 表面时的信号,再进行误差补偿,这样便可有效的解决背景光对测量精度的影响[6]。本方法简单易行,成本低廉,且实际检验效果良好。
PSD 的非线性是系统误差,若采用查表法进行非线性修正,原理简单,但需采集大量的实验数据,实验工作量大,且需占用单片机大量的存储空间。双线性插值算法简单,PSD 探测面边缘信息不足影响精度。采用神经网络进行修正,算法设计时需根据实际应用确定合适的隐含层层数及结点数,选用合适的学习算法,但对单片机的处理性能有较高的要求。因此本系统在满足精度要求的情况下,采用双线性插值法和混合查表法进行非线性修正。
4 实验数据及分析
实验选用650 nm 波长激光器,德国PI 公司的M-112.1DG 高精度电机驱动位移平台,实验环境为室内夜晚。将激光器固定在位移台上,调整PSD 探测器的方位,使激光经光学系统后垂直入射在探测器表面。以0.1 mm 步进控制位移平台使激光在探测器表面移动,同时上位机接收处理器输出的位移信息[7]。
为了使实验具有可重复性,在实验时进行了10 组测量,绘制误差分布情况如图6 所示。由图可看出,在距PSD 几何中心1000 μm 的量程内,测量值围绕真实值上下波动,并呈均匀分布,测量误差在±7 μm 以内,且探测器边缘无明显失真。
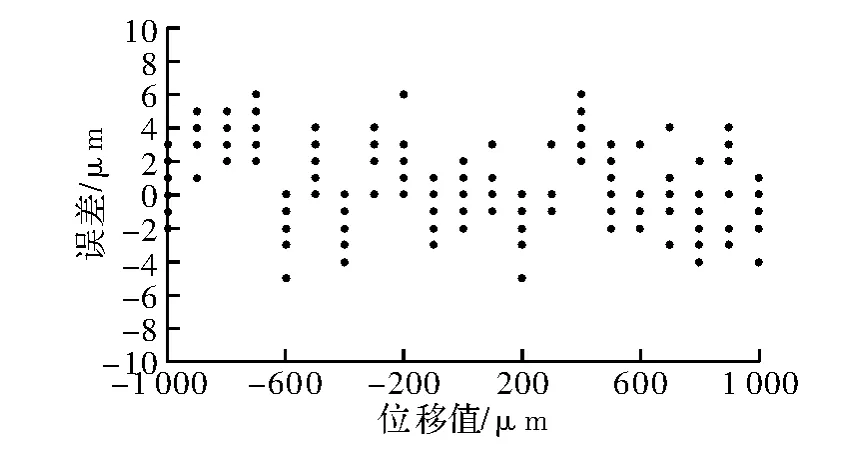
图6 误差分布图
5 结束语
本文通过对PSD 参数的分析,设计了基于PSD 的微位移测量系统,针对结构设计中常见的问题提出了一些解决方法。通过合理设计前置信号处理模块和数据采集模块有效滤除了干扰信号。同时信号处理电路中采用精密变阻器,结合相应软件处理流程,可实现对不同范围内PSD 信号的有效采集。该系统对于静态或动态条件下微小的位移、角度、厚度、振动等的测量,具有推广意义。此外,若要进一步提高系统精度,可考虑采用分辨率更高的16 位或24 位A/D 转换器。
[1] 何晓瑞,钟毓宁,王选择.基于光强调制和数字拟合的PSD 位置检测方法的研究[J].仪表技术与传感器,2010(6):94-96.
[2] 宋殿友,刘铁根,丁小昆,等.PSD 精密薄板在线多点测厚系统[J].应用激光,2012,32(1):54-57.
[3] 刘迈.改进型的神经网络PSD 非线性补偿研究[J].中国测试,2009,35(2):37-39.
[4] 吴赛燕.PSD 的性能分析及其应用[J].机械工程与自动化,2007(4):109-111.
[5] 吕爱民,袁红星,贺安之.入射光强和背景光对二维光电位置敏感器件干扰的影响[J].光学学报,1998,18(6):762-766.
[6] 裴先登,罗春,黄浩.PSD 高精度位置测量系统的研究与设计[J].华中科技大学学报:自然科学版,2004,32(2):7-9.
[7] 丁硕,杨友林,巫庆辉.基于PSD 的微位移传感器建模的实现方法[J].电子设计工程,2012,20(11):8-11.
猜你喜欢
小学科学(2020年1期)2020-02-18 06:26:40
百科探秘·航空航天(2020年12期)2020-01-22 08:57:19
小学科学(2019年12期)2019-01-06 03:38:45
信号处理(2018年5期)2018-08-20 06:16:02
信号处理(2018年5期)2018-08-20 06:16:00
信号处理(2018年8期)2018-07-25 12:25:42
信号处理(2018年8期)2018-07-25 12:24:56
太空探索(2014年9期)2014-07-10 13:06:30
中国校外教育(上旬)(2009年1期)2009-02-07 08:43:50
中学生博览(2009年8期)2009-01-14 07:55:54