基于彩色图像的海上能见度估计
2014-03-13 03:49:27周立佳战勇强徐冠雷
装备环境工程 2014年6期
周立佳,战勇强,徐冠雷
(1.海军大连舰艇学院军事海洋系,辽宁大连116018; 2.海军大连舰艇学院研究生管理大队,辽宁大连116018)
基于彩色图像的海上能见度估计
周立佳1,战勇强2,徐冠雷1
(1.海军大连舰艇学院军事海洋系,辽宁大连116018; 2.海军大连舰艇学院研究生管理大队,辽宁大连116018)
摘.要.目的实现海上能见度实时估计。方法从图像处理的角度,通过多组多距离彩色模板拍摄实验,分析饱和度同能见度的响应关系,结合最小二乘法和多模型融合,通过误差分析寻找最优模型。结果发现多组彩色模版的图像饱和度同能见度存在一定的响应关系。结论所建模型可以对能见度进行快速、连续地实时观测。相对与传统方法以及各类仪器的观测更具便利性。关键词:能见度;彩色图像;饱和度;最小二乘法;多模型融合
能见度是重要的气象要素之一,在海战场中它对交通运输和武器作战等活动都有很大的影响。即使随着科技的发展,海战场上机械类事故的发生率不断降低,但是由于海洋气象环境导致的各类事故仍然占据相当大的比重。据统计[1],舰艇事故中约有33%的事故由恶劣能见度造成。在能见度差的情况下,舰艇的避碰操纵难度加大,稍不留意就有会酿成事故。能见度的探测和预报在海战场中有重要意义。目前海上能见度大多数依靠人工目测[2],文中利用机器视觉从图像处理角度出发,通过设置的彩色模板,在不同距离下进行连续拍照实验,建立图像饱和度要素与能见度的响应模型[3],通过分析误差进行模型的筛选与融合,建立最优模型。在一定的条件下取得了比较满意的结果。
1 能见度的计算
1.1 能见度的定义
根据国际照明委员会CIE[4](International Commission on Illumination)给出的定义,在人肉眼没有任何帮助的条件下,所能识别物体的最大距离,就称之为当前的能见度距离[5]。通常意义下的能见度是指白天的水平能见度,即视力正常的人在白天无云的天气条件下,能够从天空背景中看到和分辨目标物(黑色、大小适度)的最大水平距离[6]。
影响海上能见度的因素有很多,其中比较重要的因素是雾的影响,尤其是最常见的平流雾的影响[7]。雾对气象能见度的影响,主要因为光线被大气中的雾(细微水滴或冰晶)散射、吸收衰减等原因造成的。
1.2 能见度检测原理
影响能见度的因子有大气透明度、目标和背景亮度对比、观测者的视力指标等[8]。大气消光系数σ影响大气透明度,是影响能见度的重要因素之一。大气消光系数是由大气中的气溶胶和分子的散射与吸收作用所造成的光的衰减,它等于散射系数与吸收系数之和。当光的传播距离较短的时候,大气对光的吸收可以近似忽略,只考虑散射作用。1924年Koschmieder发现光在空气中的传输定律[9]:

式中:CL和C0分别是目标物在观测位置和零距离处目标与背景间固有的对比度;T是大气透射率;d为大气能见度,需要引入视觉对比阈ε,它是CL和C0之比。对比阈值是一个复杂的物理量,既取决于人眼的生理特性,也和外界条件有关,包括物体的视角、视野亮度和物体在视场中的位置。世界气象组织明确将对比阈值为0.05对应的可视距离定义为气象视距[10]。
传统的能见度检测方法主要为散射法和透射法。散射法是直接测量来自一个小体积采样容积的散射光强[11],并根据具体角度上的散射信号与总散射量的比例关系来确定总散射系数,进而得到消光系数以利用公式反演出能见度值。透射法是测量一段较长空气柱的透射率,求得消光系数,从而获得能见度[12]。这也是目前利用仪器来观测能见度的主要原理。这两类方法都是利用检测小范围内空气,计算能见度来估计全局能见度,存在一定的局限性。还有人提出了从图像处理的方法检测能见度。安明伟等人在分析能见度值的计算模型基础上提出了另一种算法[5,13],即采用一致对比度法的边缘特征提取图像中能反映能见度变化的图像特征参数,利用最小二乘法及逆变换得到对比度与距离的拟合函数,通过分析图像特征与距离之间的关系最终确定能见度值。谢兴生等人[14]采用目标物及其背景图象的对比度来探讨能见度的自动估计问题,获得了较好的效果,但该方法对于几百米以内的低能见度及灯光能见度问题尚有明显不足。文中在一段能见度较差的雾霾天气过程中,利用预定的彩色图像模板在不同位置对其进行连续拍照实验,对图像进行预处理后分析其饱和度特征,再根据实测的能见度资料,利用最小二乘法和多数据拟合法建立了饱和度和能见度的响应模型。用此模型实现了能见度的估计。
2 模型建立
2.1 彩色模板设计
为了提高模型的估测精度和稳定性,同时也探究不同颜色通道的实验效果。设计了红、绿、蓝、黄(分别简称为R,G,B,Y)的标准彩色模板,如图1所示。4种颜色在不同能见度下的显示情况如图2所示,每一块模板的上半部分是饱和度为1的情况,下半部分则是0,0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8,0.9, 0.95,1饱和度下的彩色显示。当饱和度为0时,4块模板都已经呈现为白色,可以认为在实际天气中,大雾的影响造成模板饱和度的降低。相反,随着饱和度的增加,模板逐渐清晰,对应天气中雾的消散,能见度逐渐转好的情况。考虑到这种思想,建立饱和度同能见度的函数模型来利用饱和度实时估计能见度。

图1 能见度标准彩色模板Fig.1 The normal color model for visibility
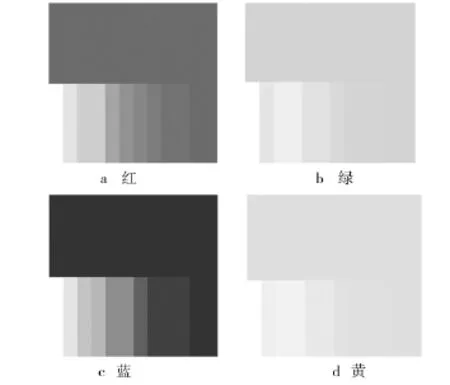
图2 4种标准彩色及其不同饱和度下的显示Fig.2 Display of four normal colors under different saturations
2.2 饱和度能见度相应模型
对于任意一块彩色模板,以红色R通道模板为例,假设相机与目标物的水平距离为d1时,能见度v和饱和度s之间的关系表示为:


同理,对于另外3组模板也可以建立相似模型,求解不同模板和不同距离下饱和度和能见度之间的关系。
2.3 多模型融合
文中采用了4种模板进行实验,由于在实验中发现每一种颜色模板在相同能见度下的变化规律均不完全相同,不同距离之下某一个颜色模板的饱和度对能见度的影响也不相同。因此,考虑联合多个颜色模型,通过调整每个模型对应的权值来减少模型同实际观测结果的误差:

式中:μ1,μ2,μ3和μ4分别是距离为d时,4个彩色模板的权重系数。
3 实验分析
3.1 实验器材
观测模板1块,规格为1.2 m×1 m,模板上依次张贴红、绿、蓝、黄四色胶纸。每块的规格为0.5 m× 0.5 m,如图3所示。相机1台,型号为尼康D5000,镜头型号为VR AF-S NIKKOR 18-55。
3.2 实验过程
模板与相机之间的水平距离选择为d1,d2,d3。实验使用分别为11,19和29 m每一组实验在3个距离位置分别拍摄模板(如图3所示)。为了在时间上保持最大同步性以减少偶然误差,在每一位置拍摄多幅照片,并在最短时间内完成。拍照的同时进行能见度实测,实测方法是选择拍摄地点附近显著的物体,标定刚好可以看清并且能够分辨的物体,再在电子地图中测距,作为实测能见度数据。

图3 一次大雾天气的实验过程Fig.3 Experiment conducted during a fog event
3.3 实验结果
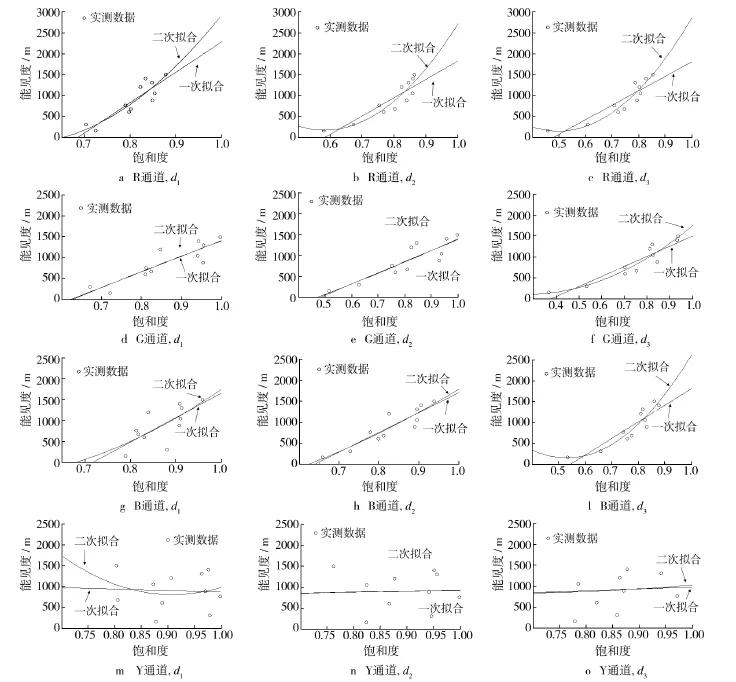
图4 4个彩色模板的在距离d1,d2,d3的一次、二次拟合曲线Fig.4 The fitting curves of four color models at the distances of d1,d2and d3
文中对饱和度和能见度数据进行了一次和二次拟合,同一颜色通道3个不同距离的拟合结果以及不同颜色通道之间的拟合结果如图4所示。图4a, b,c分别代表R通道彩色模板距离为d1,d2和d3的模拟;与R通道相类似,图4d,e,f为G通道彩色模板;图4g,h,l为B通道彩色模板;图4m,n,o为Y通道彩色模板。
4种彩色模板实验中,红色、绿色和蓝色模板在不同距离的一次和二次拟合曲线都一定程度了揭示了能见度和饱和度的响应关系,整体能见度趋势均随饱和度的增大而增大。黄色模板的拟合曲线表现为能见度并没有随饱和度的变化产生影响,敏感性较差,其同一饱和度对应的能见度变化范围非常大,最大处甚至超过1000 m。从另外的角度也可以说明黄色对雾的影响较小,对于较低能见度也表现出优秀的穿透能力。需要指出的是,每一种模型均存在适用范围的限制,尤其是二次拟合的曲线在饱和度较小时候无法使用。
3.4 误差分析
利用最小二乘法进行曲线拟合时,将拟合曲线同能见度散点差值的绝对值作为主要的误差参考。见表1,列举了4个彩色模板在3组距离实验中的误差,其中每个模板包括一次拟合和二次拟合,即n=1和n=2两种情况。
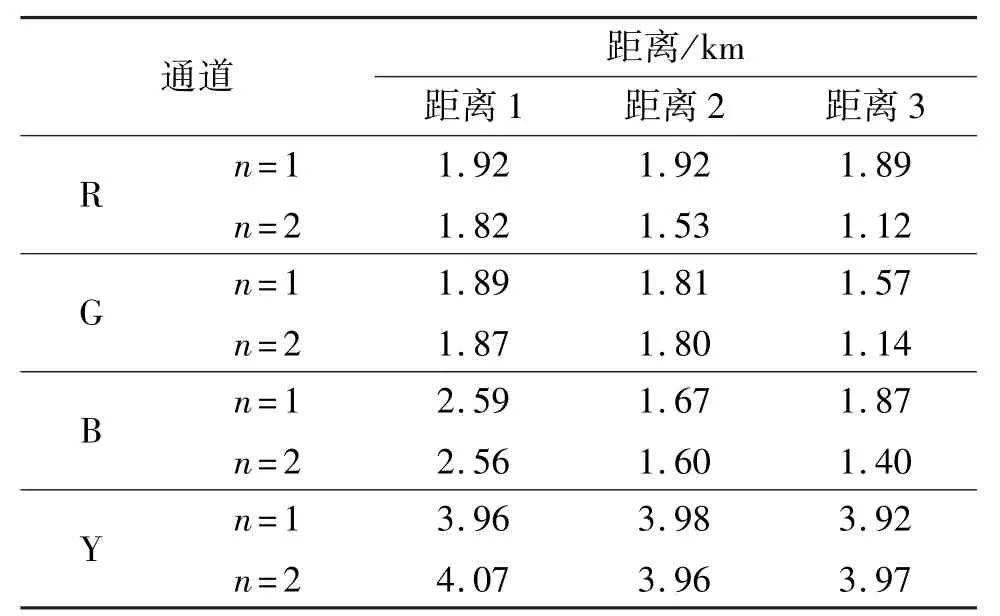
表1 拟合曲线同实测能见度累积误差统计Table 1 The cumulative error analysis between fitting curves and real-time measurement for visibility
可以发现,4组数据中除了黄色模板和蓝色通道在距离1的情况以外,拟合其余3个模板的误差基本保持在2.00以内。说明11个观测时次的累计误差在2000 m以内,其中最小误差出现在R通道距离3位置的二次拟合曲线,即图4c所示。其累计误差为1120 m,单次观测的平均误差约为100 m。4个通道中R通道和G通道的累计误差相当,分别为10.20和10.08,B通道的误差稍大为11.69,Y通道的误差最大,值为23.86。从拟合次数的角度分析,除了黄色模板以外,二次拟合的效果均优于一次拟合,尤其体现在距离3的位置上,在此位置上二次拟合比一次拟合的误差相对于其他2个位置出现了相对较大幅度的降低。若考虑距离为误差参考的主要影响因素,可以发现在4个通道的误差均随着距离的增加而减小。说明3组距离的实验中,距离3的实验结果同实际结合得最好。
3.5 模型融合
实验中,为了获取更好的估计能见度,减小误差。使用多种模板在相同拟合次数和距离下进行多颜色通道模式融合。考虑到表1中的误差统计,排除掉黄色模板,进行R,G,B等3个通道的融合实验。通过调整权值来使误差达到最小。

式中:μ1+μ2+μ3=1。
结果发现,在距离3处,二次拟合最终使用红蓝两个模板的融合所得到的误差最小,值为1.04。其最终融合曲线如图5所示,这一距离也适合一般舰艇的空间距离。通过距离1和距离2的进行的融合实验发现,红色模板所占权重为最大,且同单独使用红色模板的效果相差无几,无需进一步融合。

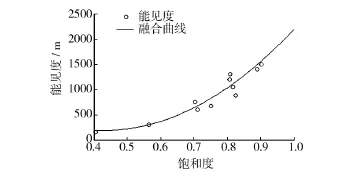
图5 最优融合曲线Fig.5 The optimal fitting curve
4 结论
能见度是海洋气象预报的重要内容之一,也是影响海空军事行动的重要气象因素之一。文中从数字图像处理的角度提出一种实时获取能见度的方法。通过对选定彩色模板进行不同距离的拍摄,再分别对模板的饱和度进行分析。寻找饱和度与能见度的响应关系,利用最小二乘法建立响应模型。通过比较不同通道、不同拟合次数以及不同距离的误差,再进行多模型的融合实验,找出最优的估计模型。虽然在饱和度较低的情况模型存在局限性,但是实际上对于能见度极低的环境,任何舰艇的活动都已经受到极大的限制。该实验揭示了彩色图像饱和度同能见度的关系,应用模型可以在一定条件下快速、准确的估计能见度。
[1] 朱福海,周立佳,邵利民,等.军事航海气象[M].北京:海潮出版社,2002. ZHU Fu-hai,ZHOU Li-jia,SHAO Li-min,et al.Military Navigation Meteorology[M].Beijing:Ocean Press,2002.
[2] 侍茂崇,高郭平,鲍献文.海洋调查方法导论[M].青岛:中国海洋大学出版社,2008. SHI Mao-chong,GAO Guo-ping,BAO Xian-wen.Introduction to Marine Survey Method[M].Qingdao:China O-cean University Press,2008.
[3] RAFAEL C GONZALEZ,RICHARD E WOODS.Digital Image Processing[M].Third Edition.Beijing:Publishing House of Electronics Industry,2012.
[4] DUMONT E,CAVALLO V.Extended Photometric Model of Fog Effects on Road Vision[J].Transportation Research Records:Journal of the Transportation Research Board,2004,1862:77—81.
[5] 安明伟,陈启美,郭宗良.基于路况视频的气象能见度检测方法与系统设[J].仪器仪表学报,2010,31(5): 1148—1153. AN Ming-wei,CHEN Qi-mei,GUO Zong-liang.Visibility Detection Method And System Design Based on Traffic Video[J].Chinese Journal of Scientific Instrument,2010, 31(5):1148—1153.
[6] QX/T 114—2010,能见度等级和预报[S]. QX/T 114—2010,Visibility Grade and Forecast[S].
[7] 周立佳.航海气象[M].北京:解放军出版社,2005. ZHOU Li-jia.Nautical Meteorology[M].Beijing:The People's Liberation Army Press,2005.
[8] 孙学金,王晓蕾,李浩,等.大气探测学[M].北京:气象出版社,2009. SUN Xue-jin,WANG Xiao-lei,LI Hao.et al.Atmospheric Observation[M].Beijing:China Meteorological Press,2009.
[9] KOSCHMIEDER H.Thoerie Der Horizontalen Sichtweite [J].Beitr Phys Frei Atmos,1924(12):171—181.
[10]李佳,葛嘉琦,陈启美.路况视频能见度检测算法[J].计算机工程,2009,35(16):175—177. LI Jia,GE Jia-qi,CHEN Qi-mei.Visibility Detection Algorithm for Road Video[J].Computer Engineering,2009, 35(16):175—177.
[11]史倩义.能见度/天气现象监视技术研究[D].石家庄:河北工业大学,2007. SHI Qian-yi.Visibility/WeatherPhenomenon Monitor Technology Research[D].Shijiazhuang:Hebei University of Technology,2007.
[12]蒲江平,胡宗刚,魏阳春,等.能见度自动观测系统性能对比及分析[J].气象科学,2002,22(1):60—71. PU Jiang-ping,HU Zong-gang,WEI Yang-chun,et al. Comparison and Analysis Of Property of Visibility Automatic Observation Instruments[J].Scientia Meteorologica Sinica,2002,22(1):60—71.
[13]AN Ming-wei,GUO Zong-liang,LI Ji-bin,et al.Visibility Detection Based on Traffic Camera Imagery[C]//2010 Third International Conference on Information Science and Interaction Science(ICIS),Chendu:ICIS,2010:411—414.
[14]谢兴生,陶善昌,周秀骥.数字摄像法测量气象能见度[J].科学通报,1999,44(1):97—100. XIE Xing-sheng,TAO Shan-chang,ZHOU Xiu-ji.Digital Camera Measurement for Meteorogical Visibility[J].Chinese Science Bulletin,1999,44(1):97—100.
[15]张海华,刘春.顾及粗差的混合最小二乘平差实验分析[J].现代测绘,2010,33(5):8—12. ZHANG Hai-hua,LIU Chun.Mixed Total Least Squares and Lest Squares Adjustment Experimental Analysis With Gross Error Considered[J].Modern Surveying and Mapping,2010,33(5):8—12.
Estimation of Visibility at Sea Based on Color Image
ZHOU Li-jia1,ZHAN Yong-qiang2,XU Guan-lei2
(1.Department of Military Oceanography,Dalian Navy Academy,Dalian 116018,China;
(2.Department of Graduate Management,Dalian Navy Academy,Dalian 116018,China)
Objective To realize real-time estimation of the visibility at sea.Methods From the perspective of image processing,several experiments were conducted from different distance using color models to analyze the response relationship between saturation and visibility.The least-squares and the multi-model fusion was used to build the best model by error analysis.Results There was a certain response between the visibility and the image saturation of multiple sets of color models.Conclusion The model established could observe the visibility fast and continuously in a real-time manner.Compared With the traditional method and observation with devices,it was more convenient.
visibility;colorful image;saturation;least-squares;multi-model fusion
10.7643/issn.1672-9242.2014.06.029
P732
:A
1672-9242(2014)06-0168-06
2014-09-12;
2014-10-11
Received:2014-09-12;Revised:2014-10-11
周立佳(1962—),男,辽宁人,副教授,主要从事军事海洋环境作战应用研究。
Biography:ZHOU Li-jia(1962—),Male,from Liaoning,Associate Professor,Research focus:military marine environment combat application.
猜你喜欢
Advances in Meteorological Science and Technology(2019年6期)2019-12-30 11:45:42
电子制作(2019年16期)2019-09-27 09:34:46
自动化学报(2017年5期)2017-05-14 06:20:56
合作经济与科技(2017年1期)2017-01-03 22:21:29
电脑知识与技术(2016年27期)2016-12-15 20:30:53
科技视界(2016年22期)2016-10-18 17:12:13
中国交通信息化(2016年6期)2016-06-06 07:11:30
科技视界(2016年8期)2016-04-05 18:58:04
海洋气象学报(2016年3期)2016-02-28 14:27:42
气象研究与应用(2016年4期)2016-02-27 12:23:16