
用于无运动部件变焦的球面变曲率镜设计及试验
2014-03-12 10:27赵惠樊学武马臻庞志海任国瑞柴文义杜云飞苏宇魏静萱
航天返回与遥感 2014年3期
赵惠 樊学武 马臻 庞志海 任国瑞 柴文义 杜云飞 苏宇 魏静萱
(1 中科院西安光学精密机械研究所空间光学室,西安 710119)
(2 西安电子科技大学计算机学院,西安 710071)
0 引言
目前,空间相机大多采用定焦光学系统[1-2],在确定的轨道高度上只能进行单一分辨率成像。考虑到同一目标的不同分辨率图像可以从不同的尺度上揭示不同层次的目标细节特征,从而为后续的识别、判读、分类甚至超分辨率重建提供依据,因此将变焦技术引入到空间光学相机的设计中具有重要的研究价值[3]。常规光学元件受镜面材料特性和制造工艺的限制,只能提供固定的光焦度,所以必须依靠部件运动(机械补偿或光学补偿)实现变焦,而这会对卫星平台的稳定性带来干扰。因此,无运动部件变焦技术逐渐引起人们的关注。
变曲率镜(Variable Curvature Mirror,VCM)的出现为无运动部件变焦提供了可能。利用变曲率镜能改变自身曲率半径的能力,再结合“光学杠杆效应”设计,在元件间隔不发生变化的情况下就可以实现系统焦距的大幅度切换。文献[4-6]提出了一种用于光谱成像的离轴四反无运动部件变焦光学系统,该系统的主镜和四镜均采用变曲率镜,通过控制曲率半径的变化实现了 3倍的变焦效果(5.2~15.6mm);文献[7-8]则在一种离轴五反结构中,采用了2块变曲率反射镜,实现了3.8倍的变焦效果,并研制了口径为 0.4m的望远镜地面原理样机;文献[9]则将无运动部件变焦技术应用到手机摄像头模组中,成功解决了变焦驱动机构所需的大行程与手机有限体积之间的矛盾;此外,文献[10]利用商用变形镜作为变曲率反射镜的替代物,实现了焦距在48~192mm范围内的4倍变焦效果。
实现无运动部件变焦的关键在于变曲率反射镜的设计与研制。要实现大变倍比,变曲率镜必须提供较大的中心形变量。大的中心形变量则对反射镜材料的特性提出了明确要求:高抗拉断性、高韧性、变形所需的力小、最大许用应力大。在各种反射镜镜面候选材料中,碳纤维复合材料(Carbon Fiber Reinforced Polymer,CFRP)非常适合构建变曲率镜,因为其极限许用应力高达417MPa,同时由于弹性模量中等偏小,较小的驱动力就可以产生较大的形变。文献[11-12]围绕该方向进行了深入研究,并成功研制了口径为200mm(有效口径为160mm)、厚度为1.79mm、初始曲率半径为2 000mm、能够形变到2 010mm、形变量达到12.71μm的CFRP变曲率镜。
本文将利用CFRP材料进行变曲率镜的设计和研制。试验表明,样片所能达到的中心形变量在口径100mm时可达20μm以上,是文献[11]所研制样片中心形变量的2倍左右,证明CFRP可以作为变曲率镜的候选材料。
1 CFRP变曲率镜的设计
CFRP变曲率镜的初始设计主要包括2点:反射镜初始形态的选择和驱动方式的确定。
文献[13]设计了一种利用变曲率镜实现无运动部件变焦的原型光学系统。该系统采用WALRUS离轴四反结构[14],如图1所示,通过在孔径平面(第三镜)上引入一块可变曲率反射镜就能够获得4倍变焦成像的效果,图1(a)为2.5m焦距光路,图1(b)为626mm焦距光路。

图1 利用变形镜实现4倍变焦比的原型光学系统Fig.1 Prototype design of 4 times varifocal system based on variable curvature mirror
由光学系统指标可知[13],变曲率镜应具有的口径不超过100mm,2档分辨率成像光路所对应的曲率半径分别为1 705mm和1 760mm。由反射镜的失高公式:Δ≈D2/(8R)(D为反射镜的有效口径,R为曲率半径)可知,2种曲率状态下反射镜失高的相对变化量约为22.9μm。假设变曲率镜从平面状态变化到2种曲率状态,那么1 705mm和1 760mm这个2种曲率半径就意味着变曲率镜必须具备至少730μm和710μm的失高变化量,即便是CFRP材料也难以实现。因此,比较合理的要求是:变曲率镜具有初始曲率半径,并以此为基础实现曲率半径的变化,如图2所示,如果从一个中间状态(蓝色)开始朝2个方向(红色)分别形变到目标曲率值,那么中心形变量就会大幅减小,从而提升了形变的安全阈值。带有初始曲率的变曲率镜是国际上的研究热点,文献[15]给出了一个概念性设计,并研制了一块曲率半径为270mm的试验样片。

图2 带有初始曲率的变曲率镜双向形变Fig.2 Schematic of VCM having initial curvature radius
因此,根据已有的CFRP反射镜镜坯规格,通过权衡选择,以1 740mm作为变曲率镜反射镜的初始曲率半径,以此为起点,通过正反2个方向的变形来获得系统所需的曲率半径。由计算可知,当曲率半径从1 740mm变化到1 705mm时,失高变化量约为14.7μm;而当曲率半径从1 740mm变化到1 760mm时,失高变化量约为8.16μm。
在确定了镜面的初始形态之后,接下来要解决挑选实现曲率变化的驱动方式。由于变曲率镜是一种功能简化的变形镜,驱动方式包括以下几种:压电式、电磁式、静电吸引式、电致伸缩式、液压式以及气压式等。由于压电驱动器响应速度快、位移分辨率高、可以提供的驱动力大并且功耗较低,所以实用化程度较高。因此,本文采用压电驱动机制,通过13点驱动实现曲率所要求的面形变化。为了实现均匀形变的效果,压电驱动器分布在3个环形区域上。其中,第1个环形区域实际上只有1个驱动器,位于镜面的中心;第2个(半径为25mm)和第3个环形区域(半径为43.3mm)分别由6个驱动器构成,如图3所示。图中驱动器阵列按照正六边形模式排布,相邻单元驱动器之间的距离为25mm。

图3 变曲率镜的结构设计Fig.3 Structure design of VCM
由图3可以看到,驱动器通过一个连接结构与反射镜进行集成。连接结构一端通过结构胶与CFRP反射镜背部进行粘接,另一端通过螺纹孔与压电驱动器的前端螺纹连接。压电驱动器通过螺钉与安装基板连接,连接螺钉的螺钉头沉入安装基板的沉孔中,在安装基板上另有6个连接孔将变曲率镜整体结构与其他平台相连。当同一环形区域内的驱动器沿同一方向均匀位移时,整个反射镜的镜面曲率半径就能够根据需要发生变化。
至此,CFRP变曲率镜的设计初步完成。但在研制实物样片以前,应借助有限元分析,对该结构是否具备获取所需形变量的能力予以验证,同时对大形变量下反射镜的应力情况以及连接结构的安全状况进行评估。
2 CFRP变曲率镜的有限元分析
变曲率镜由反射镜镜体、压电驱动器和基座3部分组成,因此,应将其作为一个整体进行有限元分析。整个分析过程可以分为变形镜模型的建立、变形镜模型的网格划分、变形镜载荷与约束条件的施加等几个方面,采用MSC.Nastran配合Solidworks建模软件协同工作。
首先需要确定建模应输入的参数,见表 1。根据要求,反射镜初始曲率半径为 1 740mm,口径为100mm,厚度为2mm,可以正反分别形变到1 705mm和1 760mm,为了给样片的实际研制留出余量,在进行有限元仿真时,可以适当增加形变量(表1中的2档曲率半径极限形变量模拟值为26μm),这样就可以使模型的能力涵盖所要求的指标。反射镜采用的CFRP镜坯由M40J/648材料的单层板铺设而成,具体参数见表2。2mm厚的CFRP反射变曲率镜由0.125mm厚的M40J/648碳纤维复合材料单层板按铺层顺序为[0/90][±45]1[0/90]2s铺设而成,在数值模拟的过程中,严格按照镜体单层板的铺设顺序拟合整体镜面的力学及热学属性。驱动器采用PI公司的高性能压电驱动器P-845.40(极限形变量为60μm,位移分辨率最高为1.2nm,长度为101mm,可以提供700/3 000N的拉/推力,截面直径为20mm)。驱动器封装主要为钢制结构,建模时可以参考钢制结构相关参数进行。用于连接驱动器和反射镜的连接结构以及底座均为钛合金材料,其中连接结构与反射镜的粘接面直径为4mm。

表1 变曲率镜有限元模型输入参数Tab.1 Model parameters used to realize FEA on VCM

表2 CFRP的单层M40J/648材料特性Tab.2 Material characteristics of single layout of CFRP
在有限元软件中选取合适的单元模型,分别建立镜面、驱动器、基底及连接机构的模型,将表1所对应的输入条件反应到实体模型上,据此建立包含镜面、基座和驱动器以及连接结构在内的完整变形镜模型,并对其进行网格划分,如图4所示。其中,反射镜模型采用带有曲率的薄平板结构,而薄板理论则是变曲率镜设计的基本出发点。

图4 CFRP变曲率镜的有限元网格划分模型Fig.4 Establishment of CFRP FEA model
反射镜曲率的切换模式如图5所示。基于有限元分析的数值模拟可以根据下述计算得到位于不同环形区域驱动器的行程距离lA、lB、lC、lD来仿真实现。也就是说,在反射镜驱动器安装位置施加强制位移,得到驱动器安装位置处的集中力,然后根据得到的集中力施加到反射镜驱动器安装位置,适当调整作用力的大小得到最终需要的工作曲率半径,同时评估镜面、驱动器的强度等参数。

图5 CFRP变曲率镜的曲率变化模式Fig.5 Schematic of variation of curvature radius
当分别在镜面43.3、25mm环带上的驱动器位置加载lB、lD的强制位移进行模拟,得到16μm的中心形变时,就可以获得1 702.09mm曲率半径和所对应的位移云图,如图6所示,不同颜色代表镜面不同位置处的位移大小,从红到蓝表征逐渐减小的位移。此时,镜面43.3mm环带上的驱动器驱动力为6.61N,方向为沿着镜面凸向负向;镜面25mm环带上的驱动器驱动力为6.61N,方向为沿着镜面凸向正向;镜面最大应力为6.77MPa,满足材料强度要求。当分别在镜面43.3、25mm环带上的驱动器位置加载lA、lC的强制位移进行模拟得到10μm的中心形变时,就可以获得1 764.56mm曲率半径和所对应的位移云图,如图7所示。此时,镜面43.3mm环带上的驱动器驱动力为6.99N,方向为沿着镜面凸向正向;镜面25mm环带上的驱动器驱动力为 6.99N,方向为沿着镜面凸向负向;镜面最大应力为 7.16MPa,也满足材料强度要求。同时可以看到,模拟获得的极限曲率半径范围比指标要求范围更广,给研制留出了余量。
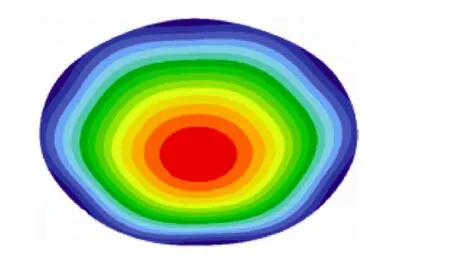
图6 实现曲率半径1 702mm后的镜面位移云图Fig.6 Surface displacement map after changing the curvature radius into 1 702mm

图7 实现曲率半径1 764mm后的镜面位移云图Fig.7 Surface displacement map after changing the curvature radius into 1 764mm
另外,镜面连接头起到一端连接镜面另一端连接驱动器的作用,镜面连接端通过胶粘与反射镜背面粘结,设计圆形粘结面的直径为4mm,驱动器连接端通过螺纹连接。镜面连接头采用钛合金材料制作,刚性很大,可以近似看作刚体。因此,驱动器的最大驱动力为76N,粘结胶面的面积为12.56×10–6m2,据此可以得到胶层的最大应力为6.05MPa,远小于胶的强度17.3MPa,连接接头的设计是安全的,满足使用要求。同时根据前面的分析,当变曲率镜处于驱动器最大16μm行程、最大驱动力为76N的极限驱动工况时,驱动器的驱动力远小于其设计最大值,其静态变形远小于驱动器行程,不会对驱动器行程产生影响,因此,该驱动器从功能方面可以实现极限驱动工况。另外,在极限工况下的驱动器头部截面所承受的应力为1.51MPa,远小于驱动器的强度。因此,该CFRP变曲率镜在超标准实现既定指标的情况下,各项连接设计也是安全的。
3 样片研制与试验结果
CFRP变曲率镜样片的研制由以下几个部分组成:
1)CFRP反射镜的研制。经过预浸料模具准备、铺层、热压固化罐、脱模、外形成型、表面粗磨、表面镀镍、镍层光学加工以及反射镜镀膜等工序后,就获得了口径为100mm、厚度为2mm、初始曲率半径为1 740mm的CFRP反射镜。
2)13点驱动阵列的研制。单元驱动器选用PI公司的P-845.40。通过PI自带的软件,就能够实现高精度、大行程的驱动控制。将13点驱动单元按图3所示安装在钛合金底座上,以此实现驱动器阵列的集成。在集成的过程中,利用三坐标测量系统,根据反射镜背部起伏精确地对各个驱动器的初始位置进行调整,使其紧密贴合镜面背部。
3)变曲率镜的集成。在调整好各个驱动器的相对高度、使之与反射镜背部充分贴合的情况下,利用环氧树脂将两者进行粘接固化,就完成了整个变曲率镜的集成。
变曲率镜的性能检测主要围绕曲率变化能力进行,具体测量过程如图8所示。图中F、C分别为干涉仪的焦点与变曲率镜的曲率中心。首先,在光栅尺的精密控制之下,沿轴向平移干涉仪距离为 L,此时干涉仪的焦点与变曲率镜的曲率中心不重合,在干涉仪测量数据中主要表现为离焦量值(L值不能过大,过大的 L值将使得干涉条纹太过密集影响测量精度)。之后调节变曲率镜背部驱动器使得干涉仪测量数据中的离焦量值趋近于 0,因此干涉仪的焦点与变曲率镜的曲率中心重合,变曲率镜的半径已变为R2(若干涉仪与变形镜距离增加L,则R2=R1–L;若干涉仪与变形镜距离减小为L,则R2=R1+L),此步骤即可以验证变形镜曲率变化的能力。重复该步骤就可以不断增加曲率半径的变化量,调整驱动器直到离焦量值没有明显的改善,此时曲率半径的值就是允许变化的2个极限位置。
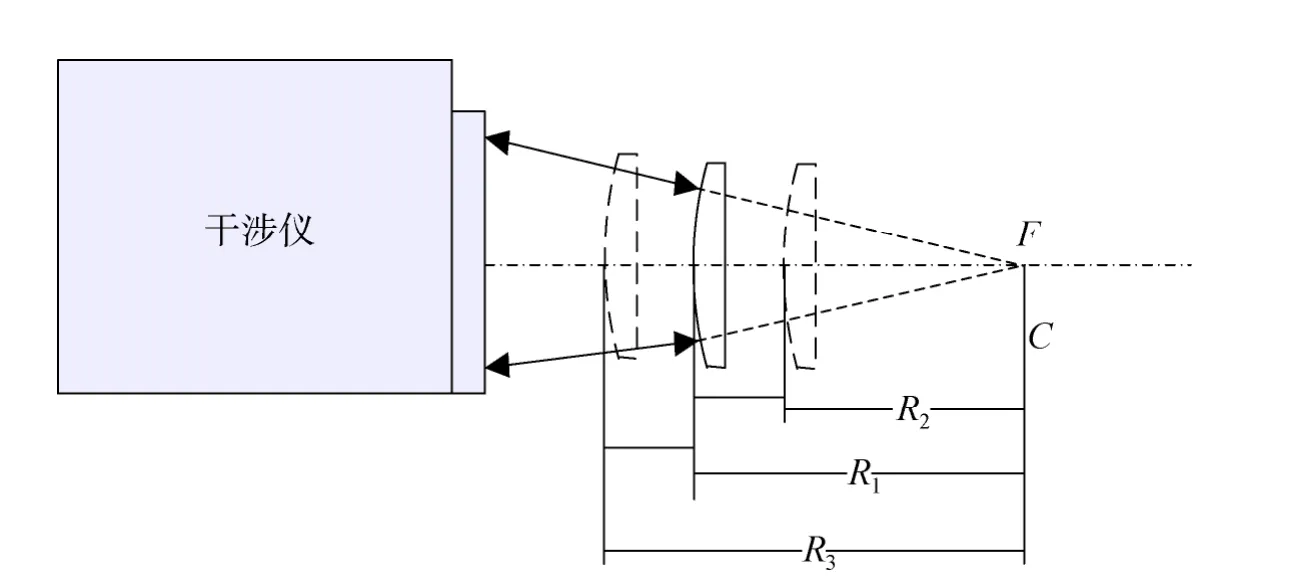
图8 曲率变化的测量过程Fig.8 Test procedure to obtain variation of curvature radius
本文以 5mm为步长,首先沿着曲率半径减小的方向移动,之后沿着曲率半径增加的方向移动,重复图8所示的测量步骤,并最终获得曲率变化的极限。以1 740mm为出发点的曲率半径变化能力验证如图9~10所示,其中左侧图像为干涉仪移动后的测量结果,右侧图像为经过离焦补偿后的结果。
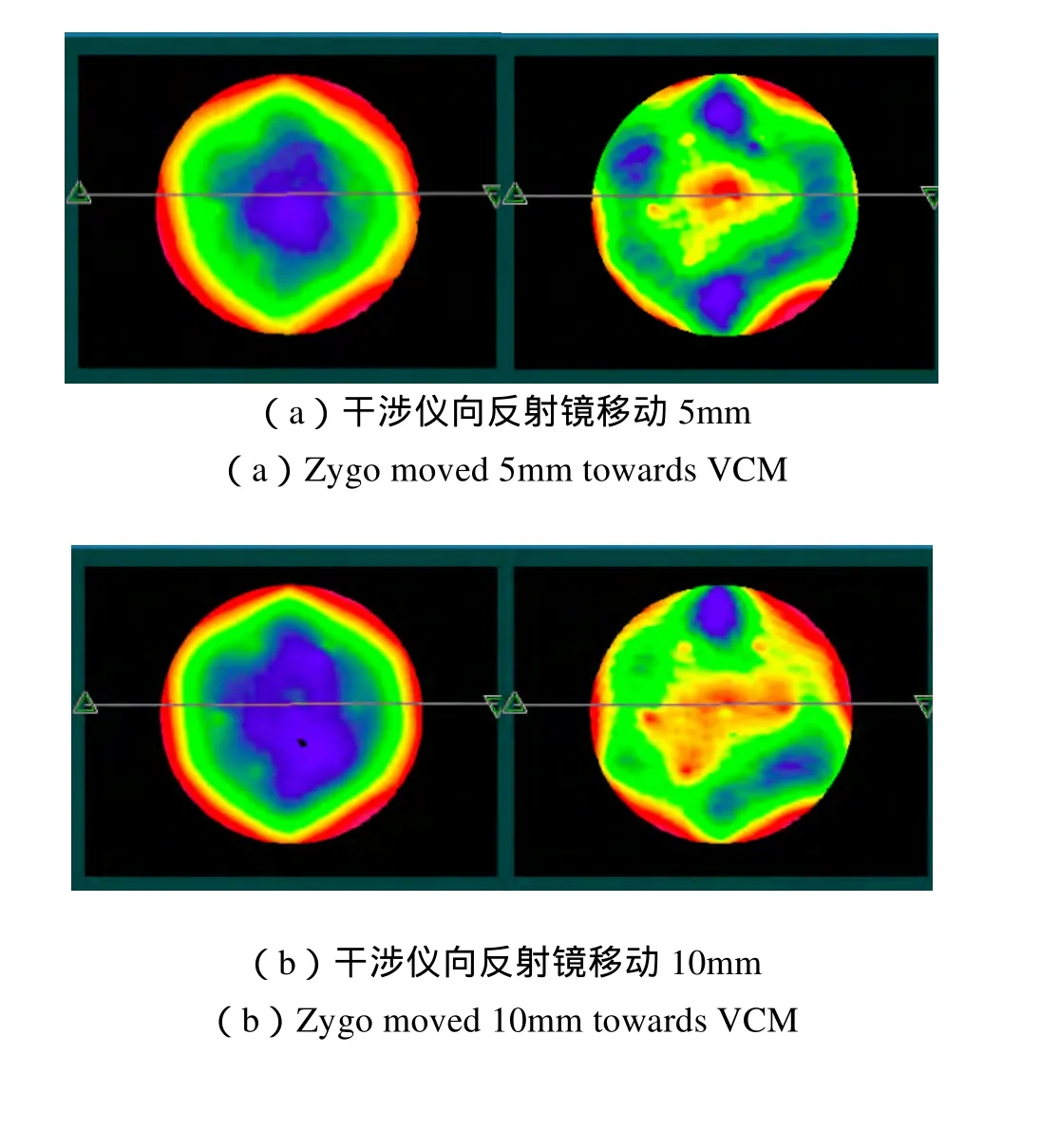
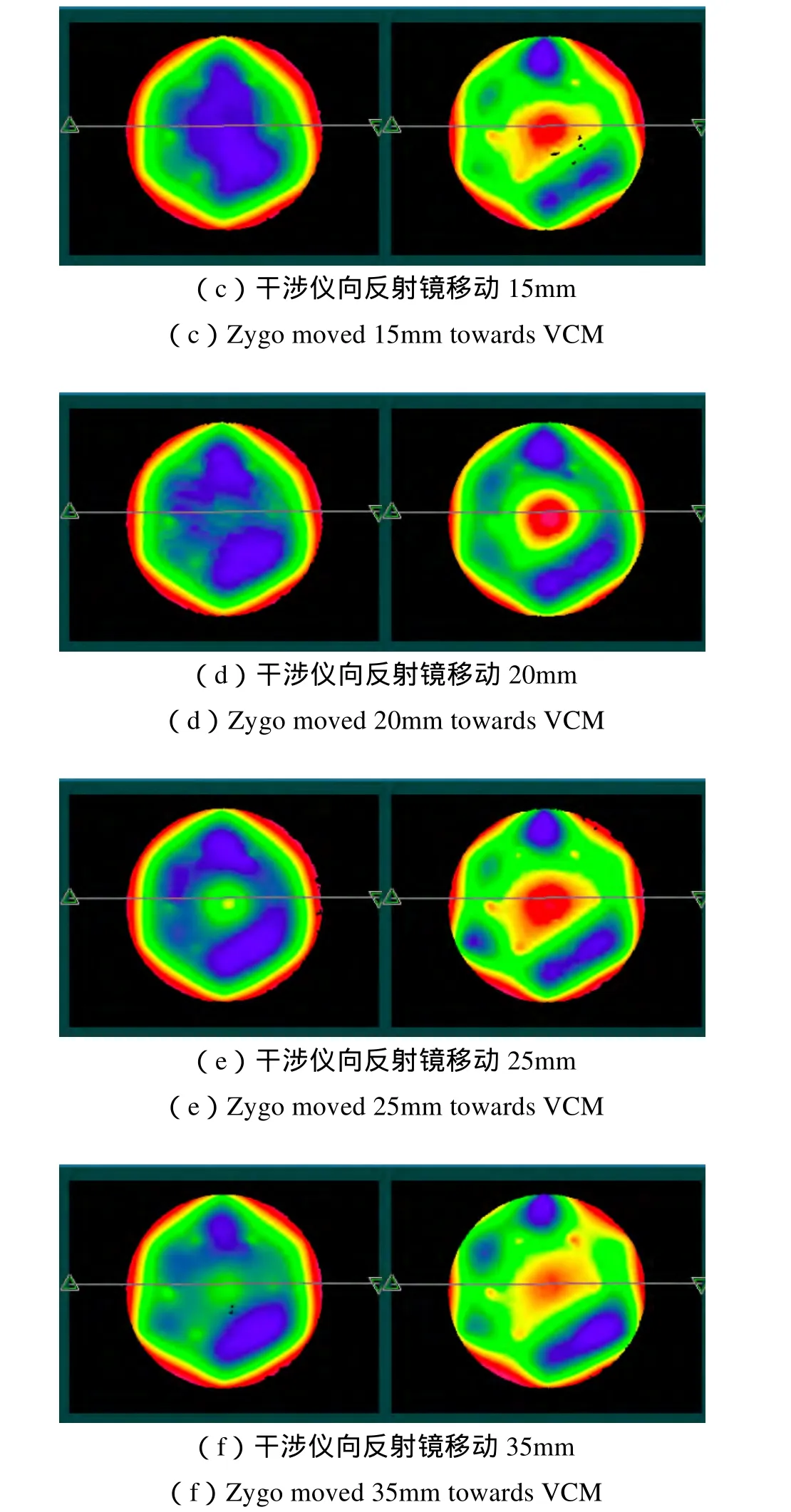
图9 曲率半径减小时的曲率变化情况和补偿结果Fig.9 Curvature changes and compensation results under the radius of curvature decreases
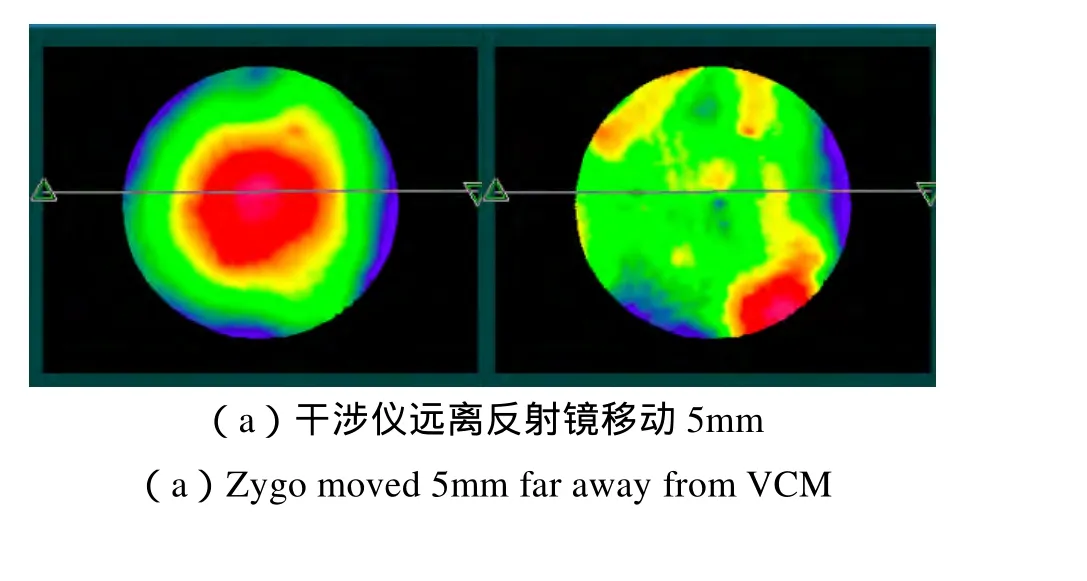
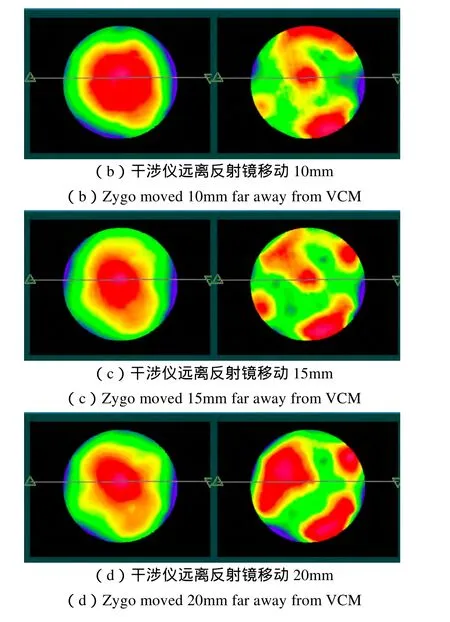
图10 曲率半径增大时的曲率变化情况和补偿结果Fig.10 Curvature changes and compensation results under the radius of curvature increases
根据图9~10可知,2档极限曲率对应的失高变化量约为22.9μm,已经远超美国CFRP的相应数据。事实上,由于在产生如此大形变的情况下CFRP镜面依然保持完好,所以实际能够达到的中心形变量还可以继续提高。但是,由于测试的过程只针对曲率变化进行,而没有对面形精度进行闭环调整,所以在极限形变量的两端,面形精度已经难以保持在1/2个波长以下。因此,在接下来的研究中,重点在于如何引入闭环控制,使得在改变曲率的同时,也能够保证获得一个可用于成像条件的面形精度。
4 结束语
无运动部件变焦的关键在于符合光学系统指标要求的变曲率镜的设计及研制。本文在基于变曲率镜无运动部件变焦距光学系统设计的基础上,对该系统所需变曲率镜的指标进行了测算,并据此给出了相应的设计和有限元分析结果,最终成功研制了基于CFRP的变曲率反射镜样片。该样片口径为100mm、厚度为2mm、初始曲率半径为1 740mm,能够正反两个方向分别形变到1 705mm和1 760mm,所对应的极限曲率形变量达到22.9μm,比美国相似规模的CFRP变曲率镜的指标还要高出近1倍。试验表明,CFRP是一种适合进行变曲率反射镜研制的材料。
References)
[1] 岳涛, 李博, 陈晓丽, 等. 空间光学发展现状和未来发展[J]. 航天返回与遥感, 2011, 32(5): 1-9. YUE Tao, LI Bo, CHEN Xiaoli, et al. The Current and Future Development of Space Optics[J]. Spacecraft Recovery & Remote Sensing, 2011, 32(5): 1-9. (in Chinese)
[2] 张新, 付强. 空间光学系统技术发展探讨[J]. 航天返回与遥感, 2011, 32(5): 29-35. ZHANG Xin, FU Qiang. The Technological Investigation on Space Optical Systems Development[J]. Spacecraft Recovery & Remote Sensing, 2011, 32(5): 29-35. (in Chinese)
[3] 李晓彤. 几何光学与光学设计[M]. 杭州:浙江大学出版社, 1997. LI Xiaotong. Geometric Optics and Optical Design [M]. Hangzhou: Zhejiang University Press, 1997. (in Chinese)
[4] Barry J R, Hadaway J B, Burleson T. All-reflective Four-element Zoom Telescope: Design and Analysis[C]. Proceeding of SPIE 1354, 1990 Intl Lens Design Conf. USA, 1990: 669-675.
[5] Kristof S, Katja R, Jens K, et al. Wide Field-of-view All-reflective Objectives Designed for Multispectral Image Acquisition in Photogrammetric Applications[C]. Proceeding of SPIE 8172, Optical Complex Systems: OCS11. France, 2011: 1-10.
[6] Kristof S, Jens K, Heinrich G. Design of an All-reflective Unobscured Optical-power Zooming Objective[J]. 2009, 48(21): 4097-4107.
[7] David V W, Ty M, Don M P, et al. Active Optical Zoom System[C]. Proceeding of SPIE 5798, Spaceborne Sensors II. USA, 2005: 151-157.
[8] Brett E B, David V W, William D C, et al. Active Zoom Imaging for Operationally Responsive Space[C]. Proceeding of SPIE 6467, MEMS Adaptive Optics. USA, 2007: 64670D1-8.
[9] Lin Y H, Liu Y L, Guo D J. Optical Zoom Module Based on Two Deformable Mirrors for Mobile Device Application[J]. Applied Optics, 2012, 51(11):1804-1810.
[10] Zhao H, Fan X W. Prototype Design of an All-reflective Non-coaxial Optical Zooming System for Space Camera Application without Moving Elements Based on Deformable Mirror[C]. Proceeding of SPIE 8557, Optical Design and Testing V. China, 2012: 855713-1-8.
[11] Sarah K, Peter D, David B, et al. Prototype Carbon Fiber Composite Deformable Mirror[J]. Opt. Eng. 2007, 46(9): 094003-1-7.
[12] Matthew E L, Jung W, Christopher C W, et al. Large-aperture Active Optical Carbon Fiber Reinforced Polymer Mirror[C]. Proceeding of SPIE 8725, Micro- and Nanotechnology Sensors, Systems, and Applications V. USA, 2013: 87250W-1-11.
[13] 赵惠, 樊学武. 高分辨率详普查结合型遥感成像技术[J]. 航天返回与遥感, 2013, 34(2): 9-15. ZHAO Hui, FAN Xuewu. High-resolution Imaging Technologies Combining Capabilities of Coarse and Fine Reconnaissance[J]. Spacecraft Recovery & Remote Sensing, 2013, 34(2): 9-15. (in Chinese)
[14] Michael R J. Unobscured Mirror Design[C]. Proceeding of SPIE 4832, International Optical Design Conference 2002. Tucson, AZ, 2002: 33-60.
[15] Jean C S, Jean M L, Pierre M. Piezo Array Deformable Mirrors and New Associated Technologies: Spherical Shape and Tip/Tilt Mount[C]. Adaptive Optics: Methods, Analysis and Applications, San Jose. California United States, 2009:1-3.
猜你喜欢
新能源科技(2022年9期)2022-11-20
数学小灵通·3-4年级(2022年5期)2022-06-01
快乐语文(2021年34期)2022-01-18
计算机与数字工程(2021年4期)2021-10-09
科学技术创新(2021年7期)2021-03-23
空间控制技术与应用(2019年6期)2020-01-09
VOGUE服饰与美容(2019年10期)2019-12-02
航天返回与遥感(2019年2期)2019-05-17
计算机与数字工程(2019年1期)2019-03-01
航天返回与遥感(2018年6期)2019-01-07
