嫦娥系列探月卫星无线电科学实验简介
2014-03-06 08:28平劲松王明远张素君简念川王震鄢建国孟桥陈从颜席禹豪唐继斐张天翼李文潇张洪波汪敏
深空探测学报 2014年3期
平劲松,王明远,张素君,,简念川,王震,3,鄢建国,4,孟桥,陈从颜,席禹豪,唐继斐,张天翼,李文潇,6,张洪波,汪敏
(1.中国科学院国家天文台月球与深空探测重点实验室,北京100012;2.中国科学院上海天文台,上海200030; 3.中国科学院新疆天文台,乌鲁木齐830011;4.武汉大学测绘遥感信息工程国家重点实验室,武汉430070; 5.东南大学空间学院,南京210018;6.北京师范大学天文系,北京100875;7.中国科学院云南天文台,昆明650011)
嫦娥系列探月卫星无线电科学实验简介
平劲松1,王明远1,张素君1,2,简念川2,王震1,3,鄢建国1,4,孟桥5,陈从颜5,席禹豪5,唐继斐5,张天翼5,李文潇1,6,张洪波1,汪敏7
(1.中国科学院国家天文台月球与深空探测重点实验室,北京100012;2.中国科学院上海天文台,上海200030; 3.中国科学院新疆天文台,乌鲁木齐830011;4.武汉大学测绘遥感信息工程国家重点实验室,武汉430070; 5.东南大学空间学院,南京210018;6.北京师范大学天文系,北京100875;7.中国科学院云南天文台,昆明650011)
在“嫦娥1/2/3号”系列探测任务中开展了行星无线电科学探测实验,这些工作包括:使用天文VLBI技术对探测器进行工程和科学测轨、定位观测,开环和闭环测速测距观测,基于微波观测重构和优化月球重力场模型,通过重力异常揭示质量瘤和撞击盆地。星载或器载主/被动雷达设备还用于探测月壤和月球内部结构。在“嫦娥2号”任务中,实现了对拉格朗日平动点利萨如轨道飞行的测控,以及对图塔蒂斯小行星的飞掠探测。在“嫦娥3号”任务中,实现了多通道开环3向相位测距和多普勒测速技术。该月球无线电相位测距技术LRPR作为一种新的空间测量技术,可以用于测定台站的位置、潮汐、星体的自转特性。还可以与月球激光测距技术LLR融合,监测月球动力学运动变化,并有潜力用于未来的火星探测任务。
无线电科学;嫦娥;月球探测;多普勒;VLBI
0 引 言
深空探测任务中的无线电跟踪数据可以直接用于月球与行星科学研究。这类探测是通过分析提取探测器到地球之间的无线电波传播途径上的扰动效应实现的。测控通信载波无线电信号的相位与幅度变化被用于反演行星大气和电离层的结构[1]、月球与行星重力场[2-3]、行星质量、环的特征、历表,以及验证广义相对论效应。这类探测任务几乎被融入所有的深空探测任务之中。在中国的绕月探测任务中也毫不例外地被成功用于对探测器的精密定轨和对月球重力场模型的反演优化[4]。
VLBI(very long baseline interferometry)技术被引入中国天文观测的历史有30年左右。从2003年开始,这项技术被用于中国的月球和深空探测的测控任务,在“嫦娥1/2/3号”月球系列探测中发挥了重要作用。从2007年开始在任务中实现了DOR和DOD VLBI技术。在“嫦娥1号”绕月探测任务中[5-6],统一S波段测控(USB)数据和VLBI数据被用于月球重力场分析。在“嫦娥2号”任务中这些技术导引了探测器在日地L2平动点附近开展了利萨如轨道的飞行探测,之后又飞掠了图塔蒂斯小行星。为了更好地抑制电离层的影响,还把探测频段提高到了X波段。开环链路测量还被中俄联合火星探测任务所采纳[7-8]。任务实现的相干信号DOR链路,为研发测试月球无线电测距技术提供了前所未有的机遇。
自“嫦娥1号”计划开始,无线电科学实验已经在中国的月球与深空探测中逐步得到了发展。中国VLBI网参与了欧洲空间局(ESA)的月球、火星和金星探测器跟踪,并把同波束VLBI技术用于月女神探测计划和“嫦娥3/4号”探测计划。基于单天线的测量技术也被用于对“嫦娥1/2号”探测器的实时追踪,以及用于对月球重力场的探测。特别地,借助对火星快车和金星快车的探测机会,我们成功地实现了对行星大气和电离层的掩星探测,获得了行星大气物理特征的扩线分布。在这项技术中研制的多普勒和行星无线电科学接收机,已经初步实现了3向多普勒测速和相位测距,并且在进一步的优化中。
“嫦娥3号”是中国的第一颗月球软着陆探测计划。在“嫦娥3/4号”任务中使用了S/X波段双频测控链路,俄罗斯的月球-全球/资源探测计划中,使用了X/Ka双频测控链路。双频同时的观测可以有效地扣除行星际等离子体介质和电离层的影响。同时,这些软着陆器由于不在移动,是月球表面固定的无线电信标源。对它们的精密测量,实际上就相当于对月球本身运动的测量。这些信标源结合高精度的测速和测距观测,可以用来测量月球与地球之间的距离变化,与LLR技术联合检测月球的物理天平动。这类观测实现的月球行星无线电相位测距技术,可以克服LLR技术在光学波段遇到的困难和问题,主要包括:无法在满月和新月时顺利观测;受到台站恶劣天气气候的干扰;台站几何构型等。对于LRPR技术,理论上可以全天候观测,而且对台站的要求不苛刻,配备了原子钟的地面射电天文台站大都可以方便地实施。这类技术可以用于对美国INSIGHT火星探测计划的观测和后续的中国火星探测计划。
本文第1节介绍了“嫦娥1号”任务中开展的以探测器精密定轨和月球重力场重建为核心的无线电科学实验情况;第2节介绍了“嫦娥2号”任务中安排的新技术实验;第3节介绍了“嫦娥3/4号”任务中实施和将要实施的月球无线电科学实验。
1 “嫦娥1号”探测任务中的无线电科学实验
“嫦娥1号”月球探测器是中国独立发射的第一颗月球探测卫星,主要目标是获取月球表面的三维影像和月面物质分布[5]。“嫦娥1号”绕月探测卫星于2007年10月24日发射,经过过调相段、地-月转移段、月球捕获段和环月飞行段等多次轨道调整后,成为绕月极轨道卫星,平均高度为200 km。“嫦娥1号”卫星任务期间积累了大量的USB测距测速跟踪数据和扩频信号VLBI数据。之前中国天文VLBI网对ESA的SMART-1月球探测器进行了验证观测,在所有的基线上获得了4~5 ns的测量精度,见图1。

图1 Smart-1 VLBI跟踪数据先验和拟合残差对比Fig.1 Pre-and post-fit residual of the tracking delays of Smart-1
基于这个技术能力,该网也全程参与了对“嫦娥1号”的S频段测控任务,包括最后的受控撞击到月面的全部过程。在受控撞击月球的观测阶段,VLBI延迟和延迟率数据用于分析撞击时刻和撞击落点。从干涉测量数据分析来看,最后的有效数据时刻扣除光行时之后,给出的撞击月表时刻是2009年3月9日UTC8 h13 m6.51 s。月面经纬度高程分别是52.273 2°,1.644 0°和-3.56 km(以月球平均半径1 738 km的球面为参照面),不确定度为0.004 0°, 0.016 8°和0.18 km。对应的垂直于视线方向的位置测量误差为0.52 km,全部位置误差为0.55 km。这项技术为后续的月球软着陆位置的工程测量提供了技术保障。
这类测距测速和VLBI测量数据可以用来进行或参与月球重力场的解算。对月球探测器的精密定轨与人造地球卫星的精密定轨类似,都是基于牛顿动力学原理,结合观测资料对初始轨道和重力场模型进行改正。定轨过程涉及观测量方程和运动微分方程。t时刻观测量方程建立形式如下:

式中:Oc为t时刻通过模型计算得到的观测量; f0为观测时刻数据类型决定的几何关系;r⇀、r⇀·为对应时刻航天器的位置和速度,在计算测量值时需要转化到太阳系质心系下进行计算;b为测量过程中的常数偏差;RFc为由大气折射、电离层延迟、应答机时延以及天线相位中心与几何中心误差等引起的测量数据的系统修正值,这一部分的改正可以在数据预处理阶段完成。方程中待估计的观测模型参数有:动力学参数p,包括航天器初始位置和速度(或者卫星轨道根数)、重力场球谐系数、大气阻力系数、光压系数等力模型参数;以及与测量量和测站有关的常值偏差b等。其中,重力场由球谐函数展开形式表示

任务前的仿真分析表明,使用“嫦娥1号”测控数据可以有效反演50阶次以内的月球全球重力场,而对更高阶次的重力成分不太敏感。与飞行在100 km高度的“月女神”主卫星比较,除采用了不同几何构型的轨道之外,“嫦娥”卫星飞行过程中动量轮卸载的频度是每24~36 h/次,一个完整的自由飞行弧段可以包括18圈之多,是“月女神”的4~6倍。使用上述方法和数据,成功获得了50阶次的CEGM01重力场模型。进一步融合了“月女神”中继星、VRAD星及主卫星的双程测距测速数据,“月女神”中继星与主卫星的四程测速数据,美国“月球勘察者”(LP)月球探测器正常任务段跟踪数据,美国1960年代发射的Apollo15与Apollo16子卫星数据,Lunar Orbiter I-V及Celementine等探测器的轨道跟踪数据,成功获得了100阶次的月球重力场模型CEGM02,模型重力异常分布见图2。该项工作使得“嫦娥1号”成为继LP探测器和“月女神”探测器之后,全球第3个实现对月球重力场模型优化的月球探测器。“嫦娥1号”卫星跟踪数据的应用使得月球全球重力场模型的长波长部分精度得到显著提高,相比于“月女神”探测器模型在10阶以内精度提高1~2倍,在20阶以内有明显改进。低阶重力场对揭示月球核幔边界的低黏性半流体层的潮汐动力学特性有着重要的作用。
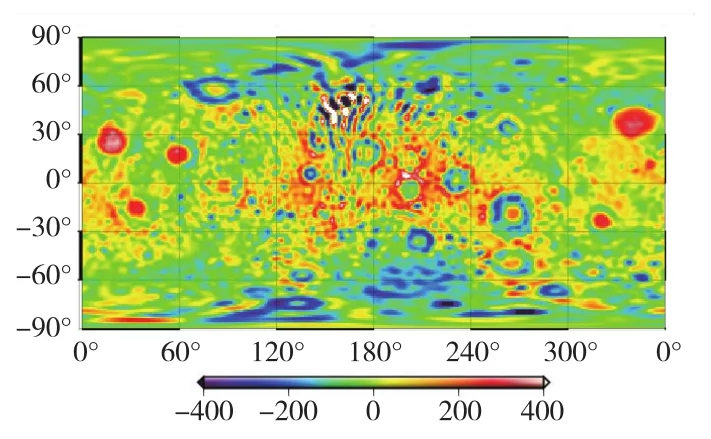
图2 月球表面自由空气重力异常分布(单位:毫伽)Fig.2 Free air gravity of the Moon on the surface(Unit:mGal)
月球和行星自由空气重力场的异常是由其星体表面形状的起伏和内部物质密度空间异常分布共同产生的。利用月球重力场并与地形数据组合,可以为揭示月球壳、幔等内部物理特征,探究月球深部构造及层圈形态,为研究早期月球内部物质演化与运动过程提供强有力的证据,还可以揭示月壳中的物质分布异常集中的区域——质量瘤区域。利用“嫦娥1号”月球地形模型,结合优化的月球重力场,证认了月球背面中尺度撞击盆地Fitzgerald-Jackson是质量瘤异常区,证明了“嫦娥1号”月球探测数据在测月学研究中具有独特的优势和特点。
通常结合月球自由空气重力异常FAGA和地形DEM凹陷,Ⅰ~Ⅱ型月球质量瘤盆地可以清晰地判定出来[2-3,9]。然而有些自然环境可能掩盖质量异常盆地。比如仅仅使用地形地貌数据有可能会错过对一个侵蚀很严重的古老盆地的辨认。特别是当一个尺度相当的后续撞击盆地破坏了该地区的形貌时,这个问题就更加显著。有时候一个比较显著的地形凹陷盆地,其对应的FAGA表现得不明显,也可能错过对一个很大的质量异常区的证认。对于尺度在数百千米的撞击盆地而言,判明其是否是质量异常盆地,进一步揭示那些被隐匿的质量异常盆地,需要结合DTM、DEM、FAGA和月球布格重力异常(BGA)多种数据。

图3 新证认的月球隐性BGA盆地的地形(左)与BGA分布(右)Fig.3 Newly identified lunar hidden BGA basins,LAM(left) topography and BGA(right)
使用“嫦娥1号”探测器获得的CEGM02月球重力异常模型以及CETM-s01激光高度计地形模型,我们计算了月球地形对自由空气重力异常的贡献,进一步获得了月球布格重力异常BGA,对BGA的贡献一般来自于月球内部质量和密度分布的不均匀。数据模型表明,月球南极的South Pole-Aitken (SPA)盆地就是月球表面最大的BGA质量异常区域。我们还在月球的背面以及边缘部分证认了其他8个中尺度的月球BGA质量盆地。图3(a)~3(b)给出了部分新发现的隐匿的质量异常盆地的地形和BGA分布特征图。其中南极区域的Amundsen-Ganswindt盆地最早是在1969年阿波罗时代被提及或发现。在当时获得的影像中,这里隐隐约约是一个335 km直径的区域凹陷,不能完全确认是一个盆地,因其位于阿门德森和甘斯温特2个撞击坑之间而得名。1994年发射升空的Clementine探测器得到了这个区域的新的影像图。这时的影像图由于没有直接的激光高度计数据,仍然无法完全确定该地区为盆地,该盆地的存在与否一直是一个争议问题。直到“嫦娥1号”发射升空后,顺利地获取了该地区的地形图。如图3(a)所示,与周围区域比较,可以清晰地看到该地区要凹陷3~5 km,周围被很陡的峭壁所环绕。利用“嫦娥1号”地形数据和重力异常数据,如图3(c)可以确定该地区的中心位置在东经122°、南纬85°,直径335 km。与历史上早期判定的中心位置相比较要更靠南4°左右。与Fitzgerald-Jackson盆地类似,该地区的布格重力异常非常强,达到了300~400 m Gal,是典型的布格重力异常区——质量瘤地区。历史观测表明,该地区属于比较古老的前酒海纪。
事实上,结合“嫦娥1号”地形和重力数据,我们还首次发现了3处巨大的月面盾形火山位于风暴洋区域[6]。CEGM02模型对月球科学研究的潜在贡献还体现在:1)显著提高了月球转动惯量的探测精度,推算出更高精度的月核密度;2)对月球外核与下月幔的物质状态(非熔融固态、熔融液态、半熔融态)、黏弹性特征有更明确的揭示,初步分析表明更接近半熔融态;3)可以进一步对月球的起源、演化过程提供重要线索。
2 “嫦娥2号”中的无线电科学实验
“嫦娥2号”是“嫦娥1号”月球轨道器的备份星,各类载荷的分辨能力都有显著改进。在无线电测量领域,除了继续沿用USB测控体制和X频段伪随机码扩频VLBI信号以外,还开展了X波段DOR试验。“嫦娥2号”任务前新增设了可以工作在S/X波段的18 m测控天线,具备USB和UXB测控能力,而且增大的天线面积使得接收信号增益提高了将近6 dB,可以实施更远距离的测量。
“嫦娥1号”轨道器VLBI测量基于USB通信实现,信号有效带宽被限制在数百千赫,电离层影响也很显著,测量精度被限制在几纳秒水平。为此,在“嫦娥1号”轨道器上设置了X波段发射系统,可以发射数兆赫带宽的VLBI伪随机噪声信号,测量精度达到了1~2 ns,而且大幅抑制了电离层的干扰。这项技术和USB技术在探测器转飞拉格朗日平动点和小行星飞掠过程中发挥了关键作用。
然而,USB的测速测距测量用于探测器轨道确定和月球重力场分析时受到了测控条件的限制,主要原因是“嫦娥2号”卫星姿态维护、动量轮卸载和加载过程发生在月球的背面,由探测器自主完成,并且没有记录发生时刻和持续时间,导致轨道被分割成不明确起止时间的很短弧段,无法合理地确定探测器绕月飞行的精密轨道和月球重力场异常。
数兆赫带宽的噪声信号对进一步提高VLBI测量构成了限制。为此“嫦娥2号”卫星测试了DOR信号体制,在主载波fo频点两边调制了2组DOR侧音:fo±(1/N)fo、fo±(1/5N)fo,合理分频系数N的设置满足利用多频点测量相对距离解算模糊度的要求和精度要求。实际实验中X波段DOR侧音信标等效带宽为约40 MHz。在“嫦娥2号”拓展任务期间,测控系统完成了深空站的建设,并联合中国科学院VLBI网共同开展了DOR测试验证,实现了0.5~1 ns的DOR延迟测量精度,且VLBI系统差问题得到很好改善。
3 “嫦娥3/4”号中的无线电科学实验
在成功实施了“嫦娥1/2号”的绕月探测计划之后,我国于2013年底成功实施了“嫦娥3号”月球软着陆和月面巡视探测。“嫦娥3号”发射重量约3.7 t、着陆器重量1.2 t、巡视器重量120 kg,包括20 kg的科学载荷。这次探测任务实现了多项月球探测的关键技术,包括:月面软着陆、月面巡视探测、探测器月夜生存、深空宽带高速通信和远程操控、火箭直接投入地月转移轨道等。着陆器搭载的对月面实时激光和雷达测距技术在这个计划中发挥了至关重要的作用。图4显示了月球与深空探测重点实验室获得的着陆器和巡视器在月面的互拍影像。
“嫦娥3号”是中国月球探测第2步、月面着陆探测的第1个实际实施任务。除了搭载许多光学遥感和就位探测科学载荷之外,它和“嫦娥4号”还设计搭载了4类无线电科学设备,可以开展包括月面天文在内的多个关联领域的探测,后者以往没有在月面上使用过。在着陆器和巡视器上搭载的关键载荷包括极紫外望远镜、探地雷达、HF频带天文射电频谱仪。在“嫦娥4号”任务中可以通过调整探地雷达的频率和工作模式灵活地实施天文观测。探测任务首次从月面上通过极紫外望远镜观测太阳活动对地球磁层等离子体的冲击和影响,研究空间天气在磁层中的物理过程。探测任务还设置了1个光学天文望远镜用于检测在月面设置天文台的相关技术和要求。
作为“嫦娥3号”的备份计划,“嫦娥4号”预计在2018年之前发射升空。“嫦娥4号”巡视器上将搭载与“嫦娥3号”巡视器相同的科学探测载荷。包括4种无线电探测设备:1)HF和VHF频段探地雷达。2)LF以及HF低频射电天文频谱仪。3)同波束X-波段VLBI信号发射器。4)S和X波段相干无线电测控信号转发器,用于探测器的高精度测速测距。
HF和VHF双波段探地雷达:雷达中心工作频率分别为500 MHz和50 MHz,采用线偏振天线,用以探测月面以下数厘米至数百米的次表层结构。在月女神探测任务中,搭载的LRS探地雷达可以数十米的分辨能力看到月表以下5~10 km的结构,并且确认了月球质量瘤异常盆地的玄武岩填充厚度最大在500~600 m。“嫦娥3/4号”的探地雷达将探测着陆区域的月壤厚度,并以更高的分辨能力探测其下部的玄武岩填充特性以及其他地质结构特性。期望可以揭示局部的火成活动历史。

图4 “嫦娥3号”任务Fig.4 Chang'e-3 mission
甚低频射电天文频谱观测:观测频率从100 k Hz到1 MHz,或者从1 MHz到10 MHz,单偏振振子天线,配置频谱分析仪器。由于地球电离层的阻挡,这些频段是地球上看不见的。频率低于5 MHz的来自宇宙空间的电磁波几乎在任何时段和区域都难以通过地球的电离层到达地面。这个带域必须突破地球的限制,利用空间探测器上搭载的天文射电天线以及行星轨道器探测雷达的被动探测模式,开展对该频带的观测。设备将对着陆区上空的电离层等离子频率及其变化特性、机制进行监测研究,探测太阳II型III型爆发射电爆发、日冕高层的百米波和千米波爆发和辐射特性;还可以监测地球磁层等离子体的千米波爆发的空间结构特征并揭示其机理。除此之外,还有机会探测绘制银河系空间在着陆区可见区域及干涉可见区域电离氢的分布,揭示与甚低频辐射关联的超新星遗迹演化特征和宇宙线产生机制;观测来自河外星系的甚低频辐射,约束宇宙演化模式和再电离发生的时间;检测Askaryan效应产生的超高能宇宙线如中微子轰击月球表面的甚低频辐射事件,并通过干涉测量确定事件发生的位置。特别地,频率在100~1 000 k Hz的射电天文观测非常有限,是天文电磁波谱的一个准空白领域。另一个准空白领域是亚毫米波到远红外波段之间的区域。利用月球表面的着陆探测机会,布设射电天线开展甚低频天文观测,将进一步开创天文观测的新领域。
VLBI信标源及其同波束VLBI观测:着陆器和巡视器搭载VLBI信标发射机,可以同时向地球方向发射X波段的DOR信号或伪随机码信号。中国VLBI网同时对落入天线方向束主瓣内的2个探测器的信号进行干涉双差分测量,双探测器的时延的差分为同波束VLBI时延观测量。由于两探测器距离接近,可以有效地消除来自传播介质、台站设备延迟、钟差的影响,以及消除对两者共同的月球自转、月面潮汐、地球自转、地面潮汐、测站位置误差和运动的成分,获得高精度的巡视器-着陆器之间的相对位置,描绘巡视器的月面行进轨迹,为就位探测提供测绘支持。
月球无线电相位测距:自从早期的Luna和Apollo月球探测任务在月面上设置了5个光学后向角反射器以来,月球激光测距LLR技术在测量月球的历表、自转、物理天平动和表面固体潮汐方面发挥着关键作用。然而目前只有个别地面台站可以开展LLR观测,而且台站的恶劣天气、新月和满月期间还将显著地影响观测,甚至导致无法实施观测。无线电波段的观测技术可以规避这些缺点和限制。
“嫦娥3号”探测器上设置了3向测量模式,由主站发射上行信号,探测器转发后由2个或多个副站接收下行信号,实现了在同一时刻多个测站的测距/多普勒测速测量。其中,主站-副站测量模式的测量模型为三程测距或测速,主站-主站测量模式的测量模型为双程测距或测速。测距模式采用侧音测距等传统模式,测量噪声约1~2 m。
“嫦娥3号”月球着陆探测任务中,月球-全球着陆器上设置了VLBI信标和载波锁相转发器,这个设计与“嫦娥3/4号”的安排基本类似。转发器可以收发S/X波段的由地面氢原子钟产生的测控信号。目前地面VLBI台站利用这些原子频标和导航卫星系统的时间比对技术,可以同步到20 ns以内。在未来的几年里,这个指标计划提高到5 ns,达到国际上深空跟踪站的时间同步水准。利用这些技术条件,就可以针对“嫦娥3/4号”月面着陆器开展高精度的开环、闭环多普勒测量和载波相位距离测量。从2014年5月开始,每月安排3~4次观测实验。积累的这类观测数据可以改进包括月球物理天平动和固体潮汐在内的月球动力学观测研究。并可用于地球动力学研究。图5给出了目前针对“嫦娥3号”着陆器开展了初步的观测实验的一个测量的结果的例子。

图5 “嫦娥3号”遥测主载波的一个多普勒和相位测量结果Fig.5 Chang'e-3 main carrier LRPR results:Doppler and phase noise
4 结束语
嫦娥系列探月计划中开展无线电科学实验探测,可以取得关于月球演化特征的重要成果。“嫦娥1号”重力数据不仅发现了新的隐藏的质量瘤异常区,还利用其对月球重力场长波长部分的精度改进证认了在月球深处存在着超低黏性的半流体层(如图6所示),是我国绕月探测的一项重要成果。另外,通过月球大地测量的手段进一步揭示月球下月幔熔融区的存在,改变了人们对月球的认识,为建立更为精细的月球内部结构模型提供了参考。

图6 月球内部构造示意图Fig.6 Lunar interior structure
月球自转不均匀变化有力地支持了月球仍然活着这一观点。并且对于月球而言,来自地球和太阳的潮汐作用也许是主导目前月球内部动力学过程的关键因素。“嫦娥3号”测距验证实验可以达到毫米分辨能力。利用“嫦娥3/4号”探测器开展毫米分辨能力的高精度的月球无线电测距观测,可以进一步对月球的起源、演化过程提供重要的线索。
致谢
本研究数据和影像的获得、实验的开展,得到了“嫦娥1/2/3号”月球探测工程任务测控系统和探月地面应用系统的长期支持,在此一并表示感谢。
[1]Fjeldbo G,Kliore A J,Eshleman V R.The neutral atmosphere of Venus as studied with the Mariner V radio occultation experiments[J].Astron J,1971(76):123--140.
[2]Konopliv A S,Asmar W,Carranza E,et al.Recent gravity models as a result of the lunar prospect mission[J].Icarus, 2001(150):1-18.
[3]Namiki N,Takahiro I,Matsumoto K,et al.Farside gravity field of the Moon from four-way doppler measurement of SELENE(Kaguya)[J].Science,2009(323):900-905.
[4]Yan J G,Ping J S,Matsumoto K,et al.Optimization on lunar gravity field model using Chang'E-1 orbital tracking data[J].Sci China Phys Mech Astron,2011(41):870-878. doi:10.1360/132010-868.
[5]Ouyang Z Y,Li C L,Zou Y L,et al.Chang'E-1 lunar mission:an overview and primary science results[J].Chinese Journal of Space Science,2010,30(5):392-403.
[6]Ping J S,Su X L,Huang Q,et al.The Chang'E-1 orbiter plays a distinctive role in China's first successful selenodetic lunar mission[J].Sci China Phys Mech Astron,2011,54 (12):2130-2144.doi:10.1007/s11433-011-4561-0.
[7]Jian N C,Shang K,Zhang S J,et al.A digital open-loop doppler processing prototype for deep-space navigation[J]. Sci China Ser G,2009,52(12):1849-1857.doi:10.1007/ s11433-009-O283-y.
[8]Ping J S,Qian Z H,Ye S H,et al.Open loop tracking in 1st chinese Mars exploration mission:Yinghuo-1 Martian orbiter [C].IEEE Xplore,APCC,2009:446-449.doi:10.1109/ APCC.2009.5375597.2009
[9]Matsumoto K S,Goossens Y,Ishiharay,et al.An improved lunar gravity field model from SELENE and historical tracking data:revealing the farside gravity features[J].J Geophys Res,2010(115):E06007.doi:10.1029/2009 JE003499
[10]Zhang S J,Ping J S,Han T T,et al.Implementation of the Earth-based planetary radio occultation inversion technique [J].Sci China Phys Mech Astron,2011,54(7):1359-1366. doi:10.1007/s11433-011-4247-7.
通信地址:北京朝阳区大屯路甲20号中国科学院国家天文台月球与深空探测重点实验室(100012)
电话:(010)64807839
E-mail:jsping@bao.ac.cn
[责任编辑:高莎]
Radio Science Experiments in Chang'e Series Missions
PING Jinsong1,WANG Mingyuan1,ZHANG Sujun1,2,JIAN Nianchuan2,WANG Zhen1,3, YAN Jianguo1,4,MENG Qiao5,CHEN Congyan5,XI Yuhao5,TANG Jifei5, ZHANG Tianyi5,LI Wenxiao1,6,ZHANG Hongbo1,WANG Min7
(1.Key Laboratory of Lunar and Deep Space Exploration,National Astronomical Observatories,CAS,Beijing 100012,China; 2.Research Center for Geo-Astrodynamics,Shanghai Astronomical Observatory,CAS,Shanghai 200030,China;3.Nashan Observation Station,Xinjiang Astronomical Observatory,CAS,Urumqi 830011,China;4.State Key Laboratory of Information Engineering in Surveying,Mapping and Remote Sensing,Wuhan University,Wuhan 430070,China; 5.Institute of Space,South-East University,Nanjing 210018,China;6.Department of Astronomy,Beijing Normal University,Beijing 100875,China;7.Solar Radio Division,Yunnan Astronomical Observatory,CAS,Kunming 650011,China)
Planetary radio science experiments have been carried out in Chinese lunar exploration missions of Chang'e-1/2/3.The astronomical VLBI technique was adopted for tracking and orbiting of the Chinese Chang'e 1& 2 missions,and played an important role in positioning the orbit injection and hard landing.Besides the orbiters' POD work and lander positioning work using open loop and close loop R&RR and VLBI tracking data,many other experiments have also been done.In orbiter missions,the lunar gravity field model was improved by using Chang'e-1 R&RR data,and new topographical features were discovered based on the new model.Also,the micro-wave passive method was used to study the lunar surface and sub-surface features.In extended mission of Chang'e-2, POD by R&RR and VLBI played key role on L2 Lissajous orbit mission,and on Toutatis asteroid fly-by mission.InChang'e-3 landing mission,a 3-way open loop lunar radio phase ranging and Doppler technique was suggested and tested.This method,called Lunar Radio Phase Ranging(LRPR)can be a new space geodetic technique to measure the station position,earth tide and rotation,lunar orbit,tide and liberation,by means of independent observation, or to work together with Lunar Laser Ranging.Also,it can be used in future Mars mission.
radio science;Chang'e;luna mission;Doppler;VLBI
P691;V556.6
:A
:2095-7777(2014)03-0192-08
10.15982/j.issn.2095-7777.2014.03.005
平劲松(1968—),男,研究员,博士生导师,主要研究方向:射电天文学,月球与深空探测。
2014-08-01
2014-08-13
国家重点基础研究发展计划(973计划)项目(2015CB857101)
猜你喜欢
学与玩(2022年6期)2022-10-28
科学(2020年3期)2020-01-06
中国惯性技术学报(2019年6期)2019-03-04
电子制作(2017年7期)2017-06-05
测绘科学与工程(2017年1期)2017-05-04
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年2期)2014-07-12
太空探索(2014年1期)2014-07-10
太空探索(2014年1期)2014-07-10
太空探索(2014年1期)2014-07-10