自主技术无人机航空物探(磁/放)综合站研发进展
2014-03-06 05:13李文杰李军峰刘世凯周乃恩
地球学报 2014年4期
李文杰, 李军峰, 刘世凯, 周乃恩
1)中国地质科学院地球物理地球化学勘查研究所, 河北廊坊 065000; 2)核工业航测遥感中心, 河北石家庄 050002; 3)中国航天空气动力技术研究院, 北京 100074
自主技术无人机航空物探(磁/放)综合站研发进展
李文杰1), 李军峰1), 刘世凯2), 周乃恩3)
1)中国地质科学院地球物理地球化学勘查研究所, 河北廊坊 065000; 2)核工业航测遥感中心, 河北石家庄 050002; 3)中国航天空气动力技术研究院, 北京 100074
无人机航空物探技术是航空物探技术的一个新兴分支。文章首先阐述了无人机航空物探技术的国内外研发情况, 然后介绍了基于国产彩虹 3无人机的国内首套应用于地球物理勘查的无人机航空物探(磁/放)综合站的研究进展。基于国产彩虹3无人机平台, 开展了专用飞机改装、超低空地形跟随飞控、远距离遥控遥测等关键技术攻关, 集成研发了自主知识产权的无人机航空物探(磁/放)综合站样机, 成功开展了面积性应用试验, 综合站样机功能、性能等达到了世界先进水平。无人机航空物探(磁/放)综合站研发取得关键进展。
无人机; 航磁; 航放; 超低空; 地形跟随
无人机航空物探是航空物探技术的新兴分支,在部署便捷性、应用成本、测量效率和质量、人员安全性等方面具有优势, 在地质调查和环境监测等领域具有广阔的应用前景, 国内外的相关研究方兴未艾。为占领这一新兴技术领域的制高点, 研发自主技术的无人机航空物探装备和应用技术, 满足我国地质普查和矿产勘查的需要, 中国地质调查局于2013年立项启动了无人机航空物探(磁/放)综合站研发及应用试验研究项目, 由中国地质科学院地球物理地球化学勘查研究所(简称物化探所)牵头, 核工业航测遥感中心(简称核航遥中心)和航天空气动力技术研究院(航天十一院)等单位联合承担实施。至2013年年底, 项目组在无人机改装与系统集成、超低空自主导航及飞行控制、航磁仪远程测控、无人机磁补偿等核心和关键技术领域取得了突破, 集成研发了一套基于国产彩虹3长航时中型无人机平台的航空物探(磁/放)综合站, 并在国内首次开展了1∶5万无人机航空物探(磁/放)综合勘查面积性应用试验, 综合站的稳定性、可靠性、探测性能得到了全面验证, 填补了我国在这一领域的技术空白(中国地质科学院, 2014)。
1 国内外进展
与传统的有人驾驶飞机航空物探相比较, 基于无人飞行器(Unmanned Aerial Vehicles, 简称UAVs)的航空物探技术存在如下潜在优势: 在远离陆地的海上开展航空测量, 或以低于100 m的超低空测量时, 可降低人员安全风险; 一组控制人员可以同时操作多架无人机协同测量, 提高测量效率; 无人机大多具有较长的续航时间(通常可大于10小时), 灵活的起降方式有利于快速部署, 因而具有更高的测量效率和灵活性; 无人机能够在飞控电脑的控制下,按照事先规划好的航线自主飞行测量, 偏航及飞行高度保持能力等飞控精度远高于传统飞机, 可在干扰较小的夜间实施测量, 物探测量数据的质量可大幅提高。
着眼于无人机航空物探技术的上述优势, 进入21世纪后, 国际上多个发达国家开展了无人机航空物探装备技术的研发工作, 先后有英国 Magsurvey公司的PrionUAV无人机航磁系统(2003年)(张洪瑞等, 2007)、荷兰 Fugro辉固公司 Georanger(2004年)(Lum et al., 2005; Partner, 2006; Barnard, 2010)、芬兰 STUK赫尔辛基的放射及核能安全委员会Patria mini-UAV 无人机放射性监测系统(2005年)(Kurvinen et al., 2005; Pollanen et al., 2009)、加拿大卡尔顿大学 Geosurv无人机航磁系统(2009年)(Laliberte, 2013)、日本无人直升机航磁系统(2012年)(Hitoshi et al., 2013; Shin’ya et al., 2013)、德国公司研发的MGT-UAS(磁/电)系统(Stoll, 2013)等无人机航空物探设备问世, 部分系统在矿产勘查、UXO探测、环境监测等领域开展了试验或应用。总体而言, 国外应用于航空物探的无人机航磁技术较成熟,多采用高精度铯光泵磁力仪搭载在固定翼无人机上;无人机航空放射性技术主要用于环境监测, 地质调查领域未见报导; 无人机航空(磁/放)综合勘查技术是空白。
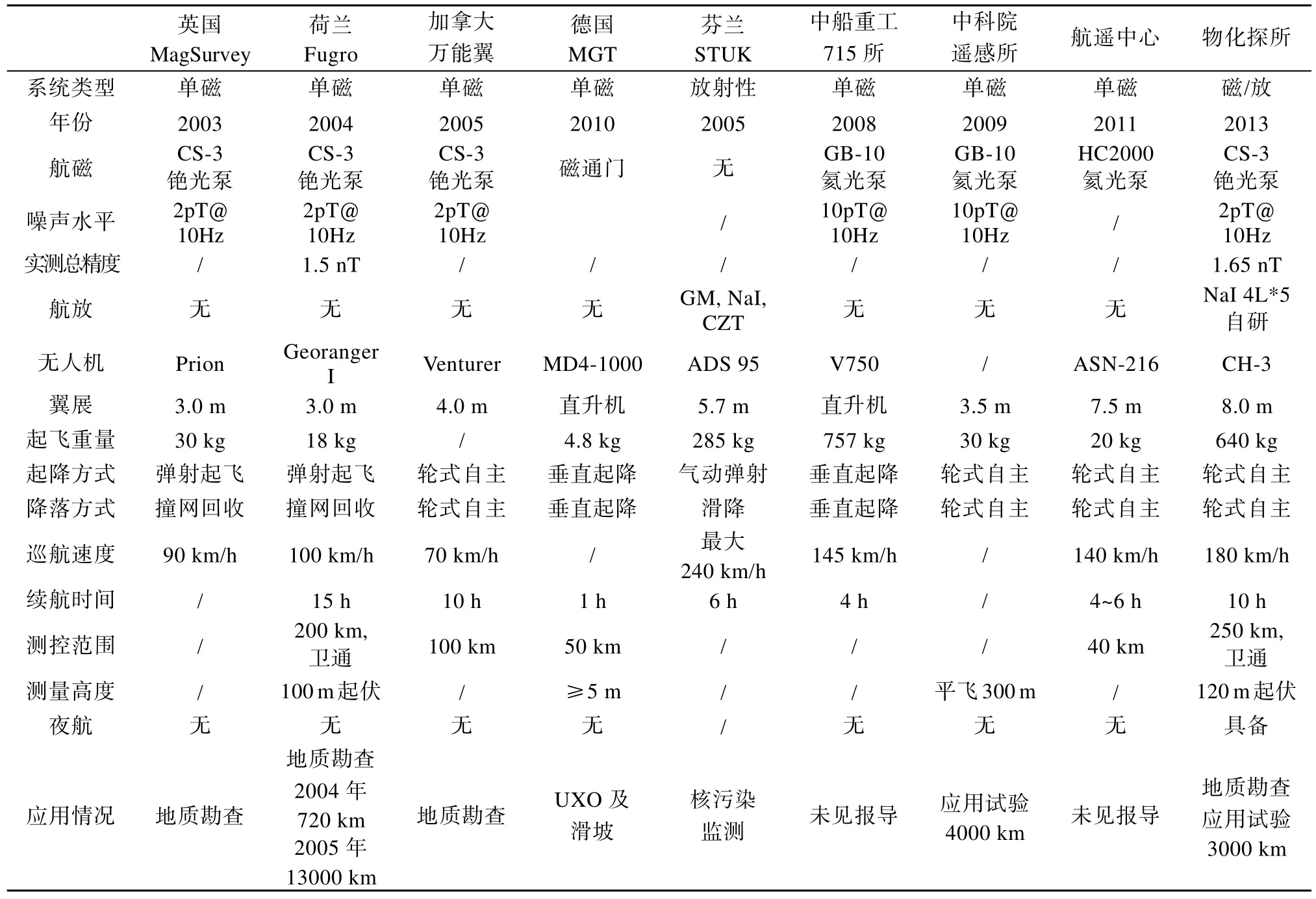
表1 国内外典型无人机航空物探系统主要参数统计Table 1 The specifications of the typical foreign and domestic UAVs airborne geophyscial system
限于无人机的载荷较小、飞行控制较复杂、飞机的安全性较有人机低等因素, 国内外的无人机航空物探技术的成熟度远未达到广泛应用, 相关研究的技术水平大致相当。在国内, 中国国土资源航空物探遥感中心、中国地质科学院及中国科学院遥感与数字地球研究所、中船重工第七一五研究所等单位也在 2010年前后开展了基于固定翼或直升机的无人机航磁测量技术的研究工作, 但均未进入实际应用(表1)。
2 研究进展
无人机航空物探技术的实用化, 主要受到无人机平台能力的限制, 超低空自主飞控是限制无人机资源探测技术成熟度的关键和瓶颈。无人机探测技术的研发应首先考虑安全性, 其次注重提升技术指标, 然后考虑降低运行成本。
2012年, 项目组开展了关键技术研究和验证工作, 在航天十一院研制的国产彩虹3中型无人机上安装了铯光泵磁力仪及航空伽玛能谱仪。彩虹3无人机起飞重量640 kg, 在180 km/h巡航速度时续航时间可达10小时。铯光泵磁探头暂时安装在彩虹3无人机机翼靠近机身1/3处的挂架下, 在机舱内安装了一条(4 L)碘化钠晶体, 以及航磁数据补偿器、航磁数据收录器、航放数据收录器等设备(图 1)。在宁夏中卫机场开展了试验试飞, 测试了改装后低空不同飞行高度条件下无人机的航线保持、高度保持及磁补偿机动能力, 验证了无人机磁/放综合勘查技术的可行性。
2013年项目组在关键技术取得验证的基础上,在无人机物探勘查改装技术等方面取得了关键突破,集成了国内外首套无人机航空物探(磁/放)综合站,并在多宝山矿区实施了国内首次无人机综合测量应用试验。应用试验完成了7个飞行架次共3000测线千米, 取得了满足航磁、航放工作规范要求的高质量试验数据, 无人机航空物探(磁/放)综合站研制取得初步成功(图2)。
3 主要创新成果
3.1 无人机物探勘查改装技术取得关键突破
基于国产彩虹 3长航时固定翼无人机平台, 在理论计算、数值模拟和气动特性分析的基础上, 设计了综合测量系统的初始气动布局及气动外形, 在确保飞行安全和气动稳定性的同时, 满足了航磁和航放设备搭载的需求。
解决了低空飞行控制律建模和仿真问题, 研发了基于高精度 DEM 数据的三维航迹规划技术, 掌握了高精度飞行控制技术, 成功实现超低空地形跟随飞行, 突破了无人机在航空物探应用中超低空飞行测量的技术瓶颈。

图1 彩虹3无人机改装航空物探(磁/放)综合测量系统Fig. 1 The modified Rainbow-3 UAVs integrated airborne geophysical (magnetic and gamma-ray) system
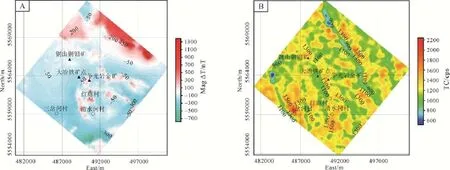
图2 无人机航空物探(磁/放)综合站实测数据Fig. 2 The survey data of the Rainbow-3 UAVs integrated airborne geophysical (magnetic and gamma-ray) system
首次成功实现了航空物探的夜间测量作业, 极大程度地提高了飞行效率, 降低了飞行成本。夜间测量磁日变及干扰小与白天, 非常有利于获取高质量的航磁数据。
3.2 集成了国内外首套无人机航空物探(磁/放)综合站
集成研发了适于无人机搭载的航磁仪器系统。研发了数据链路接口转换软硬件及测控软件, 解决了航磁仪的遥测遥控问题; 针对无人机与有人机机动控制的差异, 制定了一套基于无人机的磁补偿方法, 解决了无人机磁补偿机动动作不规范等难题。
集成研发了高度集成化的航放测量仪器系统。针对无人机商载有限的问题, 突破了无源自动稳谱技术, 去除了晶体恒温装置, 大大降低商载和供电需求; 研发了高度集成化航空伽玛数据采集模块和遥测遥控软件, 成功集成了国内首套适用于无人机的无源自动稳谱航空伽玛能谱仪, 具有完全自主的知识产权。
3.3 首次在国内成功实施了无人机综合测量应用试验
在多宝山试验区成功开展了面积性的无人机磁放综合测量试验。不同气象条件下共完成7架次40多小时无故障飞行, 完成1:1万(飞高 180 m)和1:5万(飞高120 m)大比例尺测量工作2980测线千米。
无人机实施了昼、夜飞行, 严格按照设定飞控参数沿地形起伏飞行测量, 不会产生有人驾驶飞机因飞行员疲劳注意力下降造成飞行质量下降的情况。系统的高精度飞行控制及地形跟踪能力得到有效验证, 平均偏航距小于±10 m, 高度偏差小于±20 m, 为高质量航磁、航放数据的获取提供了可靠保障。
基于高精度磁测数据绘制的基础图件与有人机航磁相比具有较好的一致性, 磁测总精度不足导致的条带状分布现象得以改善, 微弱异常的细节更加清晰连贯, 凸显了高精度大比例尺勘查的优点。
对多宝山地区航空放射性测量数据进行了初步处理, 获得了总道(TC)、K、U、Th四种等值线平面图。和有人机飞行数据进行了对比, 两者飞行测线方向不同, 搭载晶体数量不同, 但反应出该地区的放射性分布状况基本吻合, 无人机测量数据能够反映出已知K异常的存在。
综合站研发虽然取得了重要进展, 但在无人机飞控及维护程序的便捷性、无人机飞行安全性、铯光泵磁力仪国产化等方面尚需开展进一步的实用化研究, 以简化操作程序、降低应用成本、提高可靠性。
4 总结
无人机航空物探(磁/放)综合站研发项目在中国地质调查局资助下, 突破了气动外形设计、电磁兼容、遥测遥控、高精度磁测、高精度地形跟随飞控技术等关键技术, 解决了无人机航空物探超低空飞行测量的技术瓶颈, 在国产彩虹3无人机平台上成功集成研发了首套无人机航空物探(磁/放)综合测量系统, 成功开展面积性的无人机航空磁/放综合测量应用试验, 获得高质量的航磁和航放数据,全面验证了样机的稳定型、可靠性和适应性, 整体性能达到国内领先水平, 为研制实用化的地质调查和矿产勘查无人机(磁/放)勘查技术装备奠定了坚实基础。
张洪瑞, 范正国. 2007. 2000年来西方国家航空物探技术的若干进展[J]. 物探与化探, 31(1): 1-8.
中国地质科学院. 2014. 中国地质科学院 2013年度十大科技进展揭晓[J]. 地球学报, 35(1): 1-5.
References:
BARNARD J. 2010. Use of unmanned air vehicles in oil, gas and mineral exploration activities[R]. AUVSI Unmanned Systems North America 2010 Conference: 1-48.
Chinese Academy of Geological Sciences. 2014. Top Ten Scientific and Technological Progress of Chinese Academy of Geological Sciences in the Year 2013 Unveiled[J]. Acta Geoscientica Sinica, 35(1): 1-5(in Chinese with English abstract).
HITOSHI Morikawa, SATOSHI Tokue, YUMIKO Ogura, SHIGEO Matsuda, MASAYUKI Saeki, ERI Ohsawa, TAKUYA Suzuki, ISAMU Yokoi, SHIGEKAZU Kusumoto, TATSUYA Noguchi, MASAO Komazawa. 2013. A Development of Airborne Survey of Gravity and Magnetics on an Unmanned Helicopter and Its Data Processing[C]//Japan Geoscience Union Meeting 2013.
KURVINEN K, SMOLANDER P, POLLANEN R, KUUKANKORPI S, KETTUNEN M, LYYTINEN J. 2005. Design of a radiation surveillance unit for an unmanned aerial vehicle[J]. Journal of Environmental Radioactivity, 81: 1-10.
LALIBERTE J. 2013. Carleton University Fixed Wing UAV Project[R]. Canada: Carleton University.
LUM C W, RYSDYK R T, PONGPUNWATTANA A. 2005. Autonomous Airobrne Geomagnetic Surveying and Target Identification[C]//American Institute of Aeronautics and Astronautics: 1-12.
PARTNER R. 2006. GeoRanger Aeromagnetic UAV-from development to commercial survey[J]. Preveiw of Australian Society of Exploration Geophysicists, 125(1443-2471): 28-29.
POLLANEN R, TOIVONEN H, PERAJARVI K, KARHUNEN T, ILANDER T, LEHTINEN J, RINTALA K, KATAJAINEN T, NIEMELA J, JUUSELA M. 2009. Radiation surveillance using an unmanned aerial vehicle[J]. Applied Radiation and Isotopes, 67: 340-344.
SHIN’YA Sakanaka, MINORU Funaki, HIGASHINO Shin-ichiro, NORIHIRO Nakamura, NAOYOSHI Iwata, OBARA Noriaki, KUWABARA Mikio. 2013. Aeromagnetic survey by a small unmanned airplane over northern part of Deception Island[C]//Japan Geoscience Union Meeting 2013.
STOLL J B. 2013. Unmanned Aircraft System for Rapid near surface geophysical measurements[J]. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XL-1/W2: 391-394.
ZHANG Hong-rui, FAN Zheng-guo. 2007. Recent Advances in Aerogeophysical Techniques Used Abroad[J]. Geophysical & Geochemical Exploration, 31(1): 1-8(in Chinese with English abstract).
The Progress in the Development of the Integrated UAV Magnetic & Radiation Survey System
LI Wen-jie1), LI Jun-feng1), LIU Shi-kai2), ZHOU Nai-en3)
1) Institute of Geophysical and Geochemical Exploration, Chinese Academy of Geological Sciences, Langfang, Hebei 065000; 2) Airborne Survey and Remote Sensing Center of Nuclear Industry, Shijiazhuang, Hebei 050002; 3) China Academy of Aerospace Aerodynamics, Beijing 100074
UAVs airborne geophysical technology is a new branch of airborne geophysical techniques. This paper first describes the status of the development of UAVs airborne geophysical technology both in China and abroad, and then recounts the progress in the development of the UAV airborne integrated geophysical system based on domestic Rainbow-3 UAV, which carried out the first UAVs geophysical trial survey in China. This paper expounds the progress in the development of a novel prototype Unmanned Aerial Vehicles (UAVs) aeromagnetic and aeroradiometric integrated system, which includes the research progress in the aircraft modification, extremely low altitude terrain following survey technic and remote control technic. A field trail survey was carried out to test the performance of the prototype system. It is proved that some of the key features of the FTEM system prototype have reached world advanced levels.
Unmanned Aerial Vehicles (UAVs); aeromagnetic survey; aeroradiometric; low altitude survey; terrain following
P631.222; P631.63
A
10.3975/cagsb.2014.04.01
本文由中国地质调查局地质调查项目“基于无人机的航空物探(电、磁、放)综合站测量技术研发与应用示范”(编号: 12120113099400)资助。获中国地质科学院2013年度十大科技进展第二名。
2014-04-14; 改回日期: 2014-05-19。责任编辑: 闫立娟。
李文杰, 男, 1971年生。博士, 教授级高工。主要从事航空地球物理仪器研发及数据处理技术研究。通讯地址: 065000, 河北省廊坊市金光道84号。E-mail: liwenjie@igge.cn。
猜你喜欢
石油物探(2022年6期)2022-12-03
矿产勘查(2020年5期)2020-12-25
智能城市(2018年8期)2018-07-06
河北地质(2017年2期)2017-08-16
物探化探计算技术(2016年6期)2017-01-12
地球学报(2016年6期)2016-12-12
河北地质(2016年3期)2016-04-23
地球学报(2016年6期)2016-03-19
地球学报(2016年4期)2016-03-19
云南地质(2015年3期)2015-12-08