多机组网试飞时间同步方案*
2014-03-05 09:00:04赵福昌
电讯技术 2014年5期
赵福昌
(中国飞行试验研究院,西安 710089)
1 引言
随着信息技术的快速发展和机载航空电子装备水平的迅速提高,现代战场环境早已不是简单分散、静止不变的战场环境,而是呈现出信号密集、种类繁多、对抗激烈、动态多变等特征的复杂电磁环境,作战模式也由平台独立作战模式向网络协同作战模式转变,单传感器在战场上受到的干扰和威胁越来越大,而传感器组网可以提高传感器的性能和抗干扰能力,本机利用自身的传感器数据和收到的协同传感器数据进行数据融合,以实现对目标的协同探测。多机组网试飞作为一种全新的传感器使用试飞验证模式,对于数据时间同步精度要求较高,如果参与协同的各个传感器数据时间不能同步,就会造成相互协同的传感器之间不能同步工作,协同工作逻辑和算法就无法验证;如果系统通信传输时延过大,也会造成数据时间同步精度不高,数据传输滞后,影响数据实时解算精度,经过融合后的数据精度也会下降,降低组网效能。目前国内在这方面尚没有一套完整的时间同步机制和相关的时间同步体系。文献[1]提出了一种局域网内的时间同步方法,文献[2]提出了应用TOA算法的海上舰艇编队高精度时间同步系统设计,文献[3]和文献[4]提出了Link 16数据链时间同步的改进,但这些都不能完全解决多机组网试飞的时间同步问题。本文在分析多机组网试飞数据特点的基础上,分别从传输时延、多普勒频移、时间基准、数据采样率等方面探讨了试飞中协同数据的时间不同步原因,提出了一种基于IRIG-B码的综合时间同步方法,实现多机组网试飞的时间同步,并进行了试飞验证。
2 系统组成
图1是一个典型的双机组网试飞系统,其组成一般包括2套组网系统和1套目标系统。其中传感器系统1和传感器系统2为参与组网的两个传感器系统,数据链系统1和数据链系统2为组成多机通信链路的数据链系统,组合惯导系统1和组合惯导系统2通过ARINC-429接口分别为相应的传感器系统和数据链系统提供本机的位置和姿态信息,测试系统1和测试系统2采集记录相应的系统数据、数据链数据和惯导数据,并打上时间戳。GPS接收机1、GPS接收机2、GPS接收机3实时记录各自飞机的位置信息,进行事后差分,用于事后数据处理和组网精度评估。
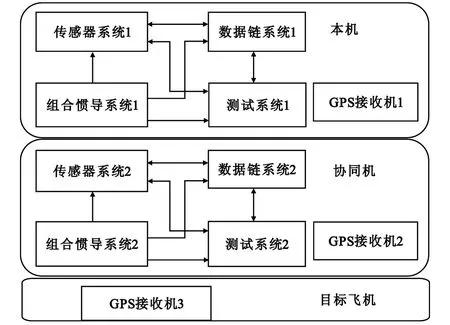
图1 典型系统组成示意图Fig.1 Schematic diagram of a typical system
该系统所涉及的数据有5种,下面分别介绍。
(1)GPS接收机输出数据
本机和目标机位置数据,经事后差分用于数据处理及试飞结果评估。由于GPS信号从卫星传到接收机所产生的误差有卫星参数误差、传播路径误差,以及接收机本身误差等,各个误差的数学模型也很难准确建立,因此GPS接收机所产生的秒脉冲相对于GPS系统时都有一定程度的误差,一般高性能GPS接收机其数据同步精度可以达到μs级。
(2)惯性导航系统输出数据
本机位置数据,用于实时数据融合处理。惯性导航系统通常内置GPS OEM板,在惯性导航系统中,需要将GPS和INS在同一时间点进行数据配准,由于坐标系转化存在延迟,采用RS232或RS485串口通信也存在时间延迟,因此在组合惯导中通常采用软件实现、硬件实现和软硬结合等方法来实现惯导数据与GPS数据的同步,一般组合惯导输出数据的精度可以达到ms级。
(3)传感器系统输出数据
传感器探测数据,用于实时融合和事后处理及评估,需要外接时间同步信号。
(4)数据链系统输出数据
传输的传感器探测数据,用于实时数据融合。
(5)测试系统记录数据
记录的传感器探测数据和本机组合惯导系统数据,用于事后处理及结果评估,需要外接时间同步信号。
该系统具有3个特点,即存在多个数据源和时间基准、要求实时数据时间同步和要求事后数据时间同步。
(1)存在多个数据源和时间基准
由于参试厂家设备较多,每架试验机上或不同试验机之间存在多个数据源,传输环节复杂,交联接口种类多,数据传输途径包含有线和无线传输,有线传输涉及429、422和以太网等多种总线类型,各个平台的设备属于多个厂家的不同系统,接口标准不尽相同,导致多个数据源之间的数据传输存在传输延迟。
(2)要求实时数据时间同步
对于协同传感器数据实时融合来说,数据同步是最重要的,而数据同步的难点就是将所有参与计算或处理数据统一到参考的标准时间上,即把试验机上相关数据源的时间对齐,使各数据源在同一时刻具有相同的时间值,文献[5-6]也指出多架飞机间数据链对实时性有一定要求。
(3)要求事后数据时间同步
协同试飞中还需要为事后数据与评估处理提供统一的时间尺度,用于数据融合效能的分析评估,因此这些数据在传输或记录过程会被打上时间戳,如果测试采集的数据在时间轴上不统一,就无法进行事后数据处理分析,也就不能给出正确的评估结果。
3 影响时间同步因素
多机组网试飞时间同步应包括机间时间同步和机内时间同步,因此需要从机间同步和机内同步两个方面对时间基准、数据源、传输环节等影响时间同步的因素进行分析。
3.1 机间影响因素
(1)双机之间存在传输时延
由于两架飞机之间相距几十公里至几百公里,受数据传输率的限制,传输的时间数据和传感器数据越多,则无线信道的传输时延越大,具体体现为数据从协同机之间的传输延迟。
(2)双机之间存在多普勒频移
由于两架飞机都处于相对高速运动状态,通常具有很大的径向速度和加速度,使得接收信号的载波具有很大的多普勒频偏(高达几十kHz,甚至上百kHz)和多普勒频偏变化率(可高达数kHz/s),接收信号存在的多普勒频移使信号相位发生旋转,从而不能正确解调时间和传感器数据。多普勒频移为 fD=vcosθ/λ,其中:fD是多普勒频移,v是发射机和接收机之间的相对移动速度,θ是入射波与移动方向的夹角,λ=c/fc是载波的波长(c=3×108m/s,fc是载波频率)。
3.2 机内影响因素
(1)时间基准不完全一致
由于参试各厂家设备较多,每架试验机上或不同试验机之间存在多个数据源和不同种类的时统设备,如GPS接收机、组合惯导系统、传感器系统、数据链系统等,它们都是各自独立的系统,对应着不同的时间基准,各自的时间起点和基准均不一致。例如GPS接收机时间对应于GPS时,其起点是1980年1月6日零时;组合惯导系统使用其内部控制电路中的计时器,通常每次开机后从零开始计时;传感器系统对应北京时间,采用计算机内部计时器进行计时。GPS接收机以原子时秒长作为自身秒长,能够保证时间间隔的高稳定性。传感器系统计算机是依靠内部晶振频率作为计时基准,相对GPS时钟其频率并不稳定,易发生漂移。
(2)数据采样率不一致
每架试验机上多个数据源的数据更新率是不同的,例如组合惯导系统的数据更新率能够达到几十至几百Hz;GPS接收机的数据更新率通常为10Hz左右,传感器系统的数据更新率也能达到几十至几百Hz;GPS接收机能够严格在整秒进行测量采样,但组合惯导系统和传感器系统并不能保证恰好也在整秒时刻进行测量采样,也就是说,在某个GPS整秒时刻进行数据融合时,虽然此刻有GPS接收机输出的测量值,但未必有组合惯导系统的测量值和传感器探测数据值。
(3)存在传输时延
进行融合的数据通常需要经过不同平台的多型设备,传输环节复杂,交联接口种类多,传输途径涉及429、422和以太网等多种总线类型。因此,每路数据从源端到目标端都需要一定的时间,例如GPS接收机数据传输到传感器系统过程中的延迟、组合惯导系统数据传输到传感器系统过程中的延迟、协同飞机1的传感器数据从数据链系统到协同飞机2传感器系统过程中的延迟等。
4 时间同步设计
4.1 时间同步方案设计
根据以上对多机组网试飞系统数据特点和影响时间同步的因素分析,本文提出了基于IRIG-B码的时间综合同步方法,设计了时间同步方案,如图2所示。该方案中的时间基准为标准B码发生器,该设备内含GPS模块,与GPS模块的PPS(秒脉冲)信号高度同步,并将GPS时间数据转换为北京时间的IRIG-B格式,输出精确的IRIG-B格式对钟信号,以实现高精度、高可靠性、多方式的系统对钟,具体方法如下:
(1)采用基于IRIG-B码的双向时间同步算法实现数据链系统时间同步;
(2)采用基于IRIG-B码的单向时间同步法实现传感器系统和测试系统时间同步;
(3)采用标准IRIG-B码发生器校准GPS接收机、组合惯导系统和数据链系统时间基准;
(4)采用基于IRIG-B码分段时延测试法校准系统时延,建立时间延迟矩阵,修正时间延迟误差。
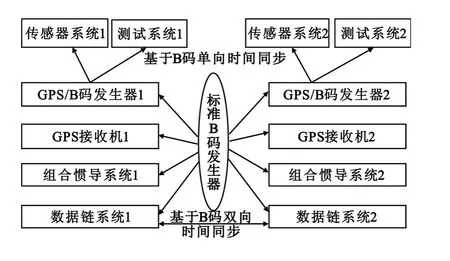
图2 时间同步方案Fig.2 Time synchronization scheme
4.2 时间同步实现方法
4.2.1 基于IRIG-B码的双向时间同步法
在多机组网试飞中,为实现协同机之间的时间同步,采用双向时间同步法,由本机和协同机根据各自测量的发送和接收时刻计算出两机之间的传输时延,从而计算出两机的时间差,进而校准,以实现两机时间同步。在本机方,由时码发送单元向协同机发送时间信号的同时,由时统设备的1 PPS脉冲信号的前沿启动时间间隔计数器,用接收到协同机的IRIG-B时码信号解调获得的1 PPS秒脉冲的前沿关闭同步计数器,测试时间间隔Tz。在协同机方,由时码发送单元向本机发送时间信号的同时,由时统设备的1 PPS脉冲信号的前沿启动时间间隔计数器,用接收到本机的IRIG-B时码信号解调获得的1 PPS秒脉冲的前沿关闭同步计数器,测试时间间隔Tx,Tzx是本机时码信号发送到达协同机的时间延迟,Txz是协同机时码信号发送到达本机的时间延迟,δt1、δt2为两机秒信号的时间差,由于双向时间频率传递信号的传播路径相同和传输设备一致性,可得到 Tzx=Txz,δt1= δt1,Tx是协同机测量的本机发射时码信号与协同机本地秒信号的时间差,Tz是本机测量的协同机发射时码信号与本机秒信号的时间差。

考虑到飞机移动速度很快带来较大的多普勒频偏,对系统时间同步性能影响较大,可以采用基于FFT的频偏估计和校正技术,通过在报文信号前插入前导码序列,并对接收到的前导码序列进行复数FFT运算,进行频谱估计,再根据频谱能量最大值计算出频差,从而调整载波输出频率,对频率偏差进行校正,如图3所示。
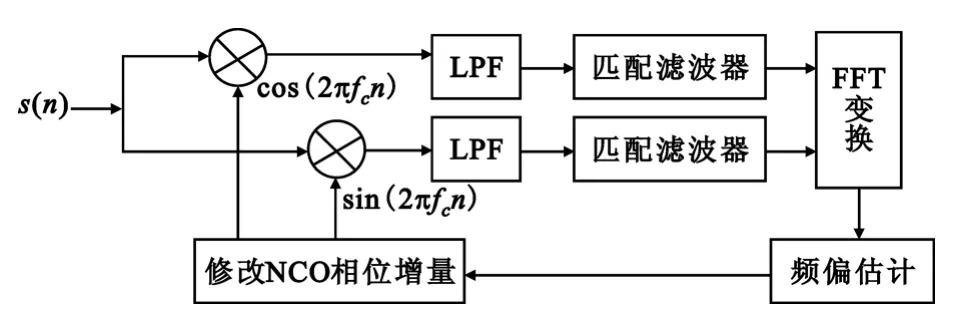
图3 FFT多普勒频偏估算和校正Fig.3 FFT Doppler frequency offset estimation and correction
接收信号经过下变频、低通、匹配滤波后转换为码元宽度为Tn的数据序列,从而适合后面的FFT算法的运算。假设在0~T时间内接收到的采样信号为

其中,f0为载波频率,Tn为调制符号的码元宽度,θ0为调制相位。
接收信号与本地数控振荡器产生的正交的本振信号(频率为fc)进行混频后得到s(n)的实部和虚部,分别是I(n)、Q(n):
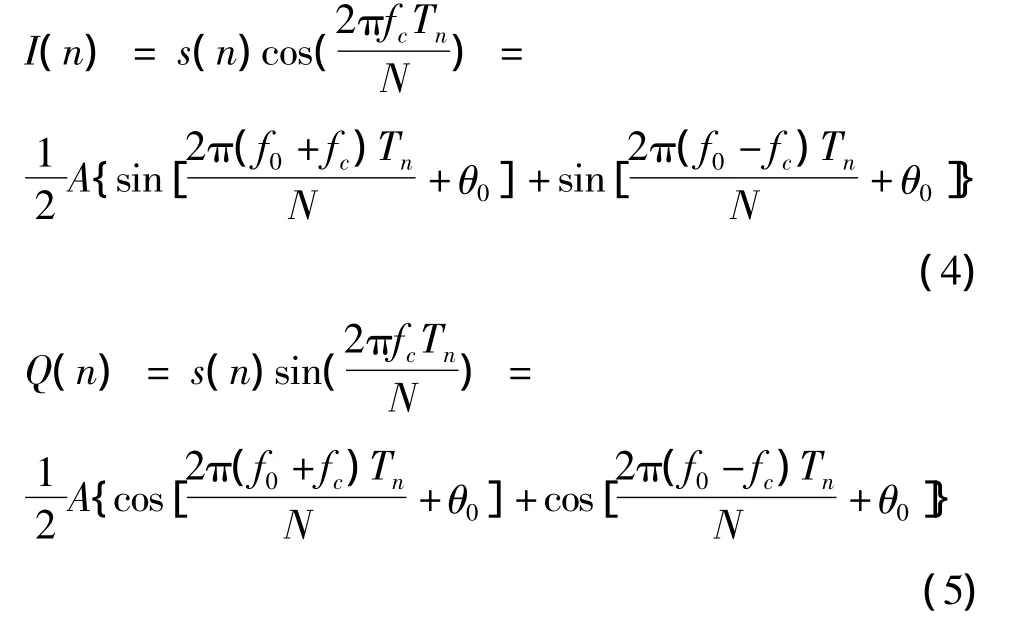
把两路匹配滤波器的输出信号I、Q组合成复信号x(n)=Q(n)+jI(n),对x(n)的N个数据做FFT,幅频特性X(k)达到最大的k值,对应可得到载波频偏的估计值,作为载波NCO的频率控制量。由数字信号处理的理论可知,复信号的离散傅里叶变换是单边频谱,当载波频偏为正值时,幅值最大的谱线位于0~N/2之间,当载波频偏为负值时幅值最大谱线位于N/2~N-1之间,采用FFT的方法得到的频谱估计存在一定的频率检测精度,当采样频率为fd时,FFT频率估计的范围为[-fd/2,fd/2],FFT频率估计精度为fd/2N。
4.2.2 基于IRIG-B码的单向时间同步法
为实现数据时间同步,在系统中配置一台标准GPS/IRIG-B码发生器作为时间基准,该设备内含GPS模块,且与GPS模块的PPS(秒脉冲)信号高度同步,将GPS时间数据转换为北京时间的IRIG-B格式,输出精确的IRIG-B格式对钟信号,以实现高精度、高可靠性、多方式的系统对钟。然后在系统处理计算机和测试计算机中插入IRIG-B码解调器,该解调器可接收并自动解调IRIG-B交流AC码,进行滤波、整形,去掉载波,取出调制波,将IRIG-B码中所包含的时、分、秒信息进行解码,解码的关键在于检测IRIG-B码中各个码元的高电平宽度,当检测到连续两个8 ms的码元出现的位置时,然后再检测随后的30个码元脉冲宽度,以确定时、分、秒。再将生成的准确时间码信号,以秒的准时点(1 PPS授时沿)为参考,生成微秒信息,产生准确的时间码信号,通过计算机内总线传输给计算机,IRIGB码解调器解调AC码的精度优于1 μs,由于计算机只有在秒中断到达时能读取正确的时间,因此还要在计算机内部实现精确定时,才能获得每秒内的精确时间间隔,在计算机采用Query Performance Counter()函数以实现精确定时,利用两次获得的计数之差及时钟频率,计算出数据采样时刻的准确时间Tk,如图4所示,其定时精度与计算机配置有关,可达到μs级。
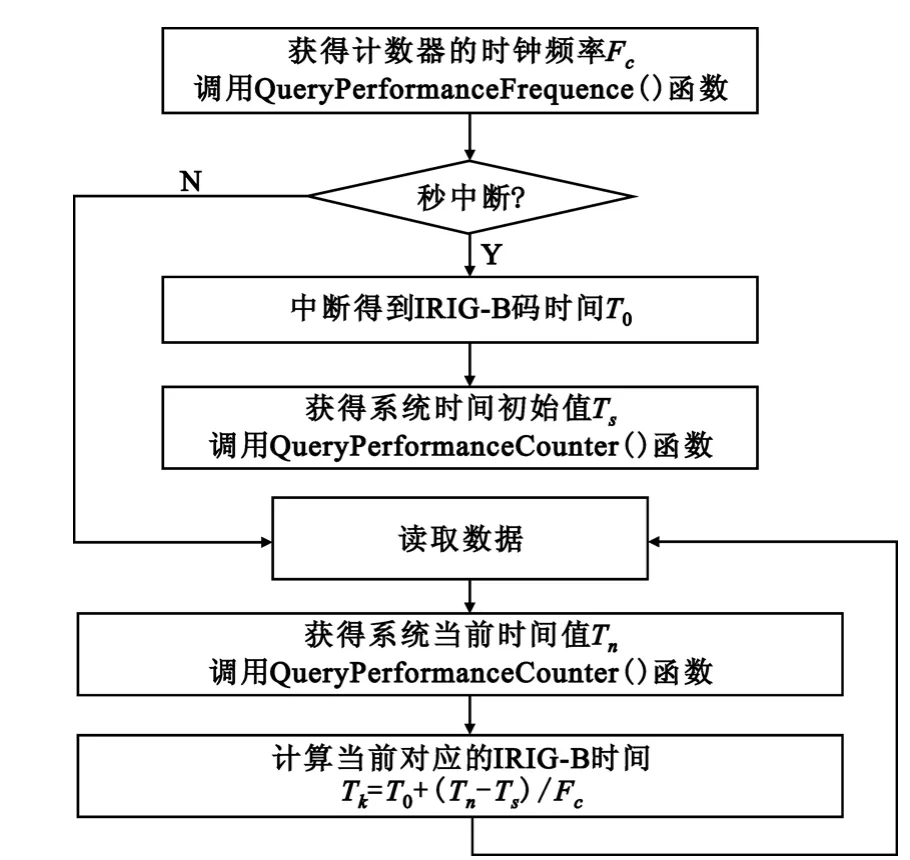
图4 软件流程图Fig.4 Software flow chart
4.2.3 基于IRIG-B码的时间基准法
在多机组网试飞中,参与数据解算的时间基准有3个:数据链时钟、惯导时钟和GPS/IRIG-B码发生器时钟,由于每台时统设备采用晶振的差异,时间会存在频率漂移现象,时统设备内部定时分频链路对时统同步带来的偏差也可能导致时统设备对时精度存在一定差异,只有建立了统一的时间基准才能修正和补偿数据传输延迟,完善时统修正量,提高时统对时精度。时间基准建立方法如下:
(1)标校GPS/IRIG-B码发生器时钟,建立时间基准。GPS/IRIG-B码发生器的主要技术指标是它输出的1 PPS脉冲前沿相对于UTC(Universal Coordinated Time)时间在秒级的时间准确度,如图5所示,将标准GPS时钟的秒脉冲与机载GPS/IRIG-B码发生器的秒脉冲同时送到时间间隔计数器中,让两者在计数器中进行秒脉冲比较,其差值即为GPS/IRIG-B码发生器时钟精度;
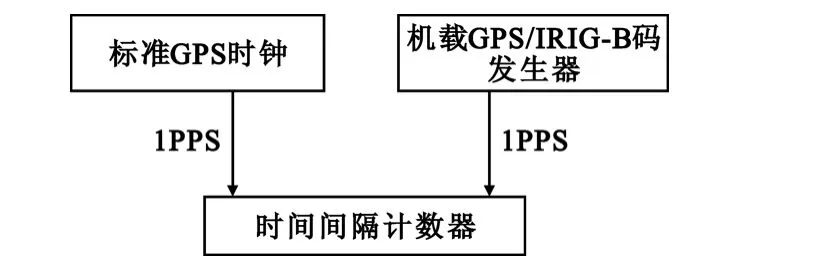
图5 GPS/IRIG-B码发生器时钟标校示意图Fig.5 GPS/IRIG -B code generator clock calibration diagram
(2)采用比较法标校惯导时钟。利用GPS/IRIG-B码发生器对各飞机的惯导时钟进行标校,将惯导的输出数据添加IRIG-B码时间戳后采集记录,对比分析得到惯导时标和IRIG-B码时间的差值;
(3)采用惯导时钟作为时间传递时钟,将惯导输出的时间信息作为时间偏差的误差传递变量。惯导同时输出两路数据,一路数据在不破坏惯导数据格式的前提下使用B码时间替换惯导时标,同时数据链系统收到惯导数据后打上数据链时标,采集数据链系统输出的数据,对比分析得到B码时间和数据链时标的差值;
(4)建立数据传输环节统一的时间基准。
4.2.4 基于IRIG-B码分段时延测试法
在统一不同时间基准的基础上,对数据传输流程进行分解,对数据传输路径进行分段,建立数据传输时延矩阵,分别利用机载GPS/IRIG-B码发生器时码发生器对所有传输环节进行传输测试,分析各段路径的传输延迟和设备的处理延迟,并在数据处理时进行补偿。
5 测试验证
实际测试结果如下:
(1)标准GPS与机载GPS/IRIG-B码发生器的时钟相差为微秒级;
(2)GPS/IRIG-B码发生器的时间与惯导时间相差为毫秒级;
(3)数据链系统时间与GPS/IRIG-B码发生器时间相差固定值;
(4)数据链系统内部延迟很小,主要延迟为系统处理延迟和时间处理延迟。
由于本机和协同机上数据链时标与IRIG-B码发生器输出的标准北京时间存在固定差值,对于数据链处理机时标和标准北京时间存在固定差异的原因进行分析,发现数据链时标通过双向时间同步法实现网内同步时间统一时,由授时体制和算法造成了与标准时间IRIG-B码存在固定偏差,该固定延迟测出后在系统处理计算机内进行补偿。
利用统一时间基准检测并修正各环节时间误差后,通过数据链传输的数据同步精度满足组网试飞要求。
按照本文中给出的同步方法进行了实际试飞验证,组网探测精度达到ms级要求,满足使用要求,并且也满足事后融合效能分析评估要求。
6 结束语
本文根据实际应用系统的特点提出了基于IRIG-B码的综合时间同步方案,初步解决了多机组网试飞中实时数据融合和事后数据评估的时间同步问题,数据时间同步精度基本控制在毫秒级,对于后续组网试飞具有一定的借鉴意义。随着试验的不断开展,下一步将继续研究提高多机组网试飞时间同步精度的方法。
[1]刘钊,戴斌.多传感器信息融合中时间同步方法的研究[J].计算机仿真,2009,26(6):124 -127.LI Zhao,DAI Bin.A Time Synchronization Approach for Multi- sensor Funsion [J].Computer Simulation,2009,26(6):124 -127.(in Chinese)
[2]刘鹏,陈颖,郭晓利.海上舰艇编队高精度时间同步系统设计[J].舰船科学技术,2011,33(6):46 -50.LIU Peng,CHEN Ying,GUO Xiao - li.A High Precision Time Synchronzation System Design for Naval Formation[J].Ship Science and Technology,2011,33(6):46 -50.(in Chinese)
[3]杨志飞,刘春茂,王晓攀,等.Link 16数据链网络同步的改进算法[J].舰船电子工程,2010,(12):99 -101.YANG Zhi- fei,LIU Chun - mao,WANG Xiao - pan,et al.An Improving Network Synchronization Algorithm for Link 16[J].Ship Electronic Engineering,2012(12):99-101.(in Chinese)
[4]田雨.战术数据链网络同步技术的一种改进算法[J].指挥控制与仿真,2013,35(5):27 -29.TIAN Yu.An Improving Network Synchronization Algorithm for Tactical Data - link[J].Command Control&Simulation,2013,35(5):27 -29.(in Chinese)
[5]文吉.机间数据链核心问题的分析与探讨[J].电讯技术,2007,47(5):89 -93.WEN Ji.Discussion about the All-important Problems in Developing the Intra-flight Data Link(IFDL)[J].Telecommunication Engineering,2007,47(5):89 -93.(in Chinese)
[6]张冲,吕娜,张岳彤,等.影响机间数据链组网协议设计的主要因素分析[J].电讯技术,2010,50(10):93 -97.ZHANG Chong,LV Na,ZHANG Yue - tong,et al.Analysis of Main Factors Influencing the Design of Organization Protocol for Intra - flight Data Link[J].Telecommunication Engineering,2010,50(10):93 -97.(in Chinese)
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16 06:05:10
中国交通信息化(2020年7期)2021-01-14 03:18:14
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
测控技术(2018年2期)2018-12-09 09:00:56
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
北京航空航天大学学报(2017年3期)2017-11-23 05:14:54
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
电子制作(2016年1期)2016-11-07 08:42:41