
基于DBS 的直流微电网控制策略仿真
2014-03-02 08:14邢小文郭龙舟
电力系统及其自动化学报 2014年11期
邢小文,张 辉,支 娜,郭龙舟,李 洋
(1.西安理工大学自动化学院,西安710048;2.西安交通大学电气设备电气绝缘国家重点实验室,西安710049)
全球范围几次大的停电事故暴露了大电网的弊端。为提高供电可靠性,微电网应运而生[1-2]。微电网分为交流微电网、直流微电网和混合微电网,其中直流微电网以可靠性高、效率高、便于控制等优点成为未来家庭及办公楼宇的主要供电架构[3-4]。
微电网中存在着多个微源,如何实现发电单元、储能装置及负载之间的协调控制,保证直流微电网母线电压的稳定,是直流微电网研究的一个重点。传统的直流微电网协调控制方法有集中控制和分散控制2 种,其中集中控制[5]是给微电网中增加一个数据中心来协调各微源间的出力,其优点是能够实时掌握各微源工作状态,易于实现各微源的优先控制,缺点是依赖于数据中心及通信线路,一旦数据中心或通信线路出现故障,整个直流微电网将瘫痪,可靠性较低;分散控制[6]是通过对各微源的独立控制来实现微电网功率平衡,其优点是能够保持微源模块化,实现微源的即插即用,可靠性较高,响应速度快,但在同一电压等级下不能够协调各微源的出力。为了对各微源的优先级及输出功率进行协调控制,将下垂控制与恒压控制相结合的DBS 控制策略[7-8]弥补了上述两种控制方法的不足。
本文采用基于DBS 的直流微电网协调控制策略进行能量管理研究,通过设定各微源的工作阈值解决其优先级分配问题;通过设计不同的下垂系数对同一电压阈值下的微源进行下垂控制,解决各微源的功率分配问题。
1 原理与设计
1.1 直流微电网的架构
图1 为直流微电网架构,其中包含2 个光伏发电单元、1 个燃料电池发电单元、1 个蓄电池储能装置、1 个并网变换器和直流负载。光伏发电单元与燃料电池发电单元通过Boost 变换器与直流微电网连接,蓄电池通过双向Buck-Boost 变换器与直流微电网连接。直流微电网由双向Buck-Boost 变换器及双向DC/AC 变换器[9]构成的两级并网变换器与电网连接。
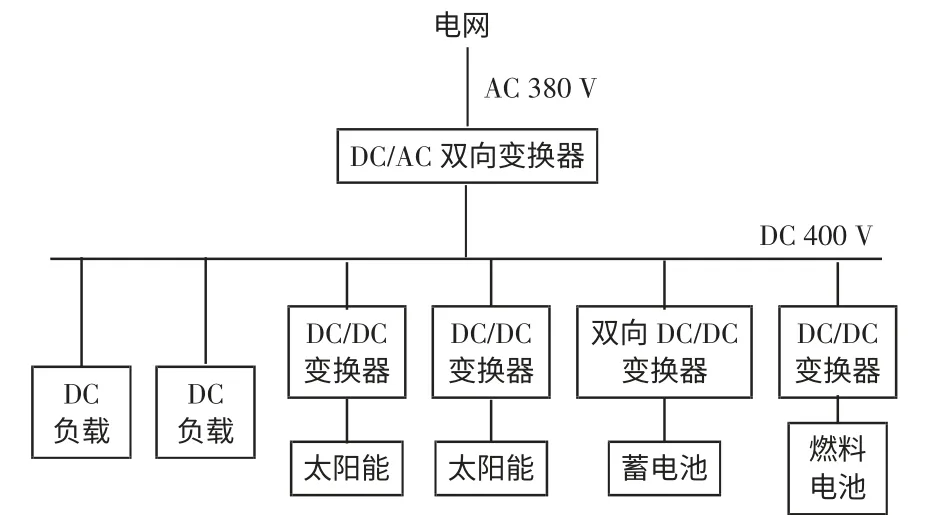
图1 直流微电网架构Fig.1 Architecture of DC microgrid
1.2 直流微电网的DBS 控制
图2 为直流微电网控制框图,微电网额定电压Udc为400 V±5%。按照DBS 控制策略,可将电压分为5 个等级,分别为380 V、390 V、400 V、410 V和420 V。光伏发电单元属于再生能源,拥有最高优先级;蓄电池拥有次优先级;燃料电池成本较高,属于备用电源,优先级最低。
直流微电网具有并网和孤岛两种工作模式。并网模式运行时,直流侧母线电压平衡由大电网优先进行控制,当直流母线电压跌落,大电网输出能量,稳定直流母线电压,维持直流侧负载的功率需求;当直流母线电压升高,直流微电网向大电网输出能量,稳定直流母线电压。恒压控制两级变换器将直流母线电压稳定在额定电压,见图2(a)。
孤岛运行模式时,依照划分的5 个电压等级,当各微源的工作电压阈值为Udc≥410 V 时,光伏发电单元采用下重控制(droop control),光伏1 下垂率为0.72,光伏2 下垂率为0.4;当Udc<410 V时,光伏发电单元采用最大功率跟踪MPPT(maxi mum power point tracking)控制,见图2(b);当Udc≥400 V 时,蓄电池进行充电控制;当Udc≤390 V 时,蓄电池进行放电控制,蓄电池充放电控制均采用恒压控制,见图2(c);当Udc≤380 V 时,燃料电池启动,进行恒压控制,并将直流母线电压稳定到380 V,见图2(d);若燃料电池仍不能满足负载需求,则需将部分负载切除,以满足直流微电网的最低电压运行要求。直流微电网的工作状态及其随母线电压及负载变化的曲线见图3,描述了DBS 控制策略实现直流微电网协调控制的过程。
直流微电网协调控制过程的工作状态如表1所示。
状态1:轻载时,光伏发电单元提供的功率远大于负载功率,Udc≥410 V,接口变换器采用下垂控制,限制输出功率。此时若蓄电池未充满,则对其进行恒流充电,母线电压由光伏发电单元接口变换器控制。
状态2:负载增加时,Udc<410 V,光伏发电单元输出功率达到最大,下垂控制切换为MPPT 控制。根据蓄电池不同的工作方式,将状态2 分为3个子状态。
状态2.1:负载较轻时,光伏发电单元输出功率大于负载功率,400 V≤Udc<410 V,蓄电池恒压充电,燃料电池不工作,母线电压由蓄电池控制;
状态2.2:负载增加,光伏发电单元输出功率刚好满足负载功率,390 V <Udc<400 V,蓄电池和燃料电池均不工作;
状态2.3:负载继续增加,光伏发电单元输出功率不能支持负载功率,380 V <Udc≤390 V,蓄电池放电,母线电压由蓄电池控制。
状态3:当光伏发电单元和蓄电池都不能满足负载功率时,Udc≤380 V,达到燃料电池的放电阈值,燃料电池工作,并将母线电压稳定到燃料电池的放电阈值。
2.3 仿真验证
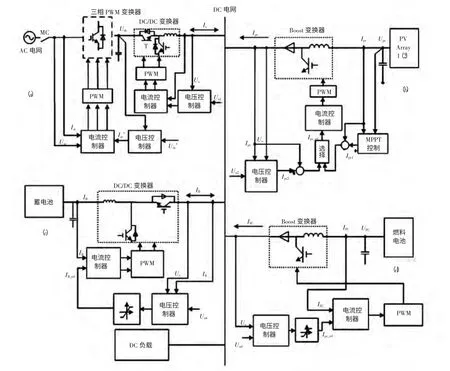
图2 直流微电网控制框图Fig.2 Control block of DC microgrid
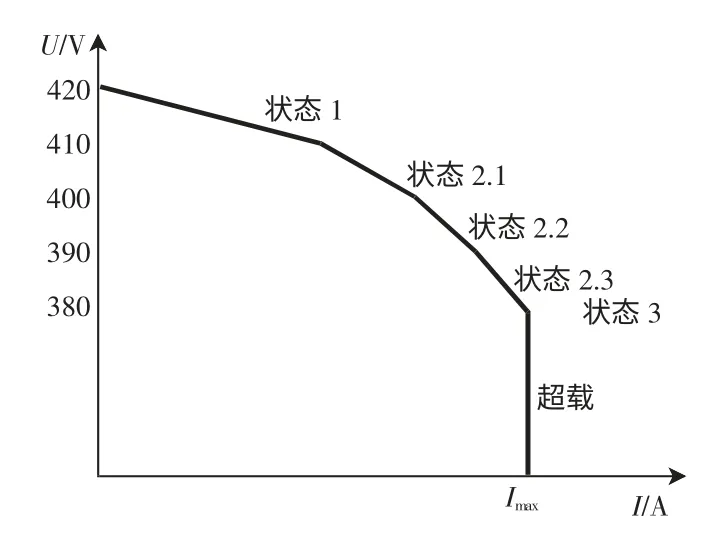
图3 孤岛模式下直流母线电压外特性曲线Fig.3 External characteristic of DC bus voltage in island mode
在Matlab/Simulink 下构建直流微电网的仿真模型,主要参数如下:直流母线额定电压为400 V±5%,光伏发电单元1 输出功率5 kW,光伏发电单元2 输出功率10 kW,蓄电池容量480 A·h,燃料电池功率10 kW。
孤岛模式运行时,微电网仿真结果见图4。0~0.5 s,负载较轻时,直流母线电压Udc≥410 V,2 个光伏发电单元均采用下垂控制,此阶段内光伏1的输出电流为3.7 A,光伏2 的输出电流为8.4 A,多余能量提供给蓄电池充电;0.5~1 s,负载增加,母线电压Udc<410 V,2 个光伏发电单元从下垂控制切换为MPPT 控制,输出电流达到最大值,光伏1为12 A,光伏2 为24 A,前两个阶段直流微电网的母线电压高于蓄电池的充电阈值,因此1 s 前均向蓄电池充电;1~1.5 s,负载继续增加,母线电压降至390 V <Udc<400 V,2 个光伏发电单元仍采用MPPT 控制,此时母线电压低于蓄电池的放电阈值,高于蓄电池的充电阈值,因此蓄电池不工作;1.5~2 s,负载继续增加,母线电压降至380 V <Udc≤390 V,2 个光伏发电单元仍然采用MPPT 控制,由于母线电压低于蓄电池的放电阈值,蓄电池放电;2 s 以后,负载继续增加,母线电压Udc≤380V,达到燃料电池的放电阈值,燃料电池开始放电,向负载提供能量,并将直流母线电压稳定到380 V,光伏发电单元工作在MPPT 状态,蓄电池处于放电状态。
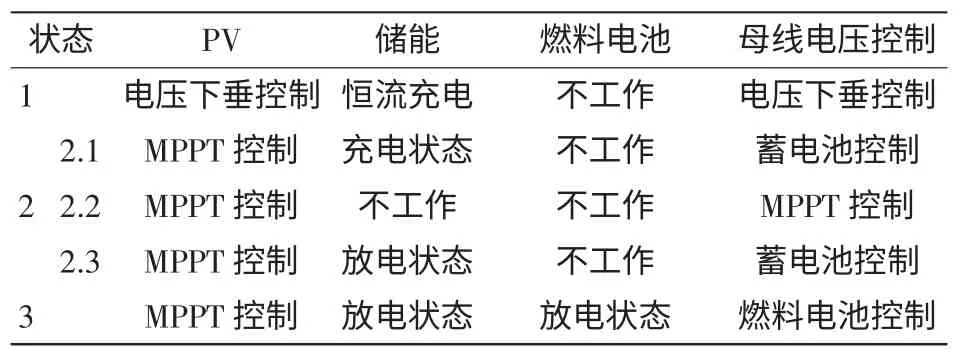
表1 孤岛模式下系统的工作状态Tab.1 Working states of island mode system
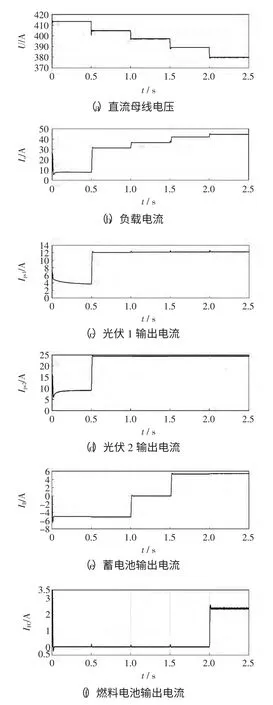
图4 孤岛模式下直流微电网仿真结果Fig.4 Simulation results of DC microgrid in island mode
并网模式运行时,采用直流受控电压源模拟直流微电网,直流微电网母线电压和电流波形见图5 和图6。1 s 前受控电压源的给定电压高于400 V,因此并网变换器向大电网输出能量,并将直流母线电压稳定在400 V;1 s 后,受控电压源的给定电压低于400 V,需要从大电网吸收能量,保持直流母线电压为400 V,随着受控电压给定值的不断降低,变换器的端口电流不断增大,微电网从大电网吸收的功率越多。
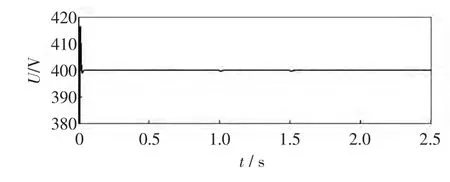
图5 直流微电网母线电压Fig.5 Bus voltage of DC microgrid
图7为网侧功率的变化情况,1 s 前,直流微电网向电网输出能量,1 s 后,电网向直流微电网输出能量。
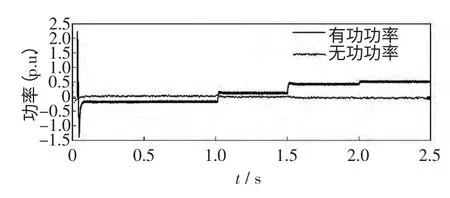
图7 网侧功率波形Fig.7 Power wave of AC side
3 结论
对已有控制策略进行对比分析,选择DBS 控制策略用于微电网中微源的协调控制。
(1)依据各微源特性,进行优先级划分,通过设置不同的工作电压阈值,采用DBS 控制策略实现微源的优化利用。
(2)在Matlab/Simulink 中构建仿真模型,结果表明:利用DBS 控制策略能够在允许的工作范围内稳定直流母线电压,同时保证直流微电网对负载的可靠供电。
[1]赵宏伟,吴涛涛(Zhao Hongwei,Wu Taotao). 基于分布式电源的微网技术(Review of distributed generation based microgrid technology)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2008,20(1):121-128.
[2]鲁宗相,王彩霞,闵勇,等(Lu Zongxiang,Wang Caixia,Min Yong,et al). 微电网研究综述(Overview on microgrid research)[J].电力系统自动化(Automation of Electric Power Systems),2007,31(19):100-107.
[3]Lee F C,Boroyevich D,Mattevelli P,et al. Proposal for a mini-consortium on sustainable buildings and nanogrids[EB/OL].http://www.cpes.vt.edu/public_files/CPES_SBN_Proposal_Aug2010.pdf,2010.
[4]Boroyevich D,Cvetkovic I,Dong Dong,et al. Future electronic power distribution systems:a contemplative view[C]//12th International Conference on Optimization of Electrical and Electronic Equipment.Basov,Romania:2010.
[5]Salomonsson D,Soder L,Sannino A. An adaptive control system for a DC microgrid for data centers[J]. IEEE Trans on Industry Applications,2008,44(6):1910-1917.
[6]Guerrero J M,Vasquez J C,Matas J,et al. Hierarchical control of droop-controlled AC and DC microgrids—a general approach toward standardization[J].IEEE Trans on Industrial Electronics,2011,58(1):158-172.
[7]Schonberger J,Duke R,Round S D. DC-bus Signaling:a distributed control strategy for a hybrid renewable nanogrid[J]. IEEE Trans on Industrial Electronics,2006:53(5):1453-1460.
[8]Bryan J,Duke R,Round S. Decentralized generator scheduling in a nanogrid using DC bus signaling[C]//IEEE Power Engineering Society General Meeting. Denver,USA:2004.
[9]Dong Dong,Thacker T,Burgos R,et al.Control design and experimental verification of a multi-function single-phase bidirectional PWM converter for renewable energy systems[C]//13th European Conference on Power Electronics and Applications.Barcelona,Spain:2009.
猜你喜欢
中学生数理化(高中版.高二数学)(2020年2期)2020-04-21
自动化与仪表(2018年7期)2018-07-31
车迷(2017年12期)2018-01-18
汽车维修与保养(2017年1期)2017-05-15
电子制作(2017年10期)2017-04-18
汽车维修与保养(2016年1期)2016-09-07
汽车维修与保养(2016年12期)2016-03-14
汽车维修与保养(2016年11期)2016-02-21
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年5期)2015-04-09
