
基于拉线机构的机器鱼运动控制仿真研究
2014-02-28 01:26杜如虚陈贤帅
江苏科技大学学报(自然科学版) 2014年5期
杜如虚,钟 勇,陈贤帅,李 峥
(1.香港中文大学机械与自动化工程系,香港999077)(2.广州中国科学院先进技术研究所,广东广州511458)(3.新加坡国立大学生物医学工程系,新加坡117456)
目前的水面或者水下航行器,例如船舶、潜艇和其他水下航行器,都是利用螺旋桨来推进的,能否利用鱼类的游动原理来做出比具有螺旋桨推进更快和噪声更低的水下推行器,突破当今比较单一的运输方式和水下推进方式已成为一个热门研究课题[1].鱼类在水中运动时,其速度或效率单一方面可能不是最优的,但其整体综合性能却接近最优.正是鱼类在水中运动的完美性,吸引越来越多的学者研究鱼类的运动机理,希望制造出和真鱼一样的仿生机器鱼[2].目前大部分机器鱼采用多关节串联驱动方式,即一个电机驱动一个关节,通过控制每个电机的运动来控制每节鱼体的摆动角度和速度,以此来拟合鱼的游动身体曲线.这种方法已经很接近鱼类游动时的体态,但是这种方法对电机的同步性要求较高,同时随着关节数增多控制起来也比较复杂,功耗较高.随着柔性机构在机器人领域的兴起[3],特别是在机械臂方面有很多应用.文献[4]中提出了一种线驱动仿生机械臂.这种基于拉线机构的机器鱼具有很独特的优点,由于高度的欠驱动,其柔性很大,很适合进行大幅度的柔性摆动;一个电机控制一对线,极大地减少了机器鱼所需的电机数和控制难度.
文中首先介绍了拉线机构的特点及其应用,然后对拉线机构的机器鱼进行了仿真分析,并且对比了传统的多关节串联驱动的机器鱼.通过对比分析,证明了基于拉线机构的机器鱼的优越性.最后介绍了基于拉线机构的机器鱼的样机及其控制系统和控制策略,为以后的研究做好铺垫.
1 拉线机构
拉线机构是基于仿生学原理设计而成,其灵感来自于蛇的骨架和章鱼触角的肌肉分布[5].
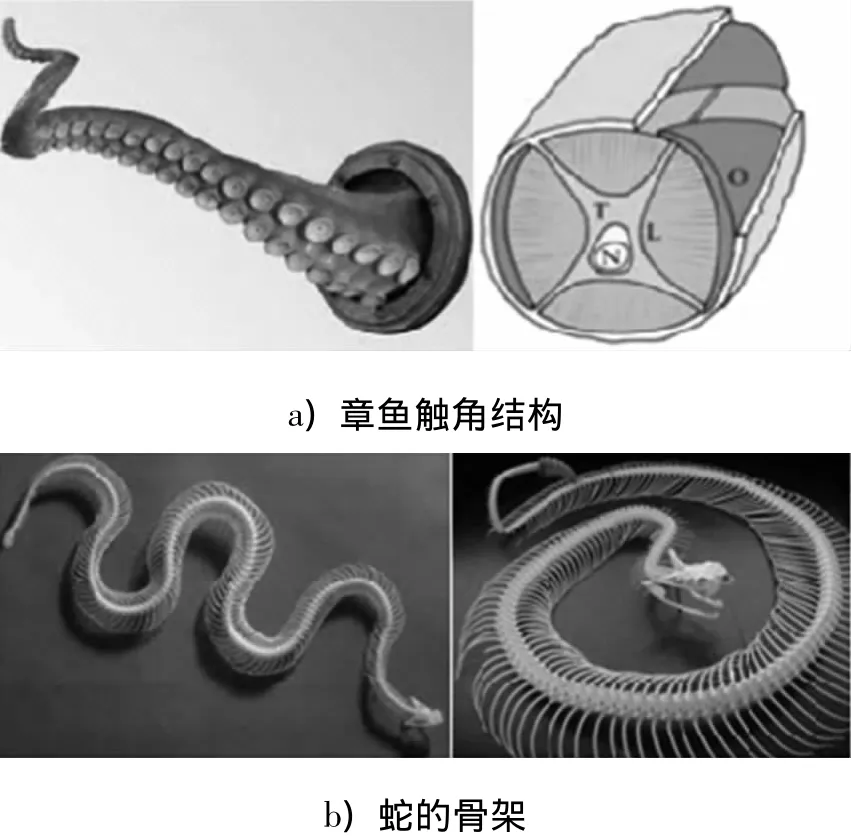
图1 拉线机构的设计来源Fig.1 Inspiration of wire-driven mechanism
从图1中可知,章鱼触角图1a)主要由两组纵向肌肉构成,这些肌肉组负责触角的弯曲运动.例如,当左边的肌肉收缩时,右边的肌肉会舒张,触角就向左弯曲.上下一组肌肉,负责触角上下方向的弯曲.在这两组纵向肌肉的配合下,章鱼的触角就能向空间任意方向弯曲,而拉线机构是用线的伸缩代替肌肉的伸缩.从蛇的骨架图1b)可以看出,其身体弯曲成几个圆弧状,每个圆弧段中的每个关节的转动是一样的,而且关节之间的转动具有连续性,这是脊柱和外部肌肉存在约束的结果.这些生物的身体特点给了研究人员设计拉线机构的灵感.
文中的拉线机构是由柔性杆、关节和控制线组成,其中柔性杆起着脊椎的作用,控制线相当于肌肉组,每个关节相当于蛇骨架的关节.如图2所示的拉线机构机械臂[4,6],金属线固定在电机的转盘上,当电机转动时,这对金属线是此消彼长的关系,但这对线在机械臂中的长度之和不变,从而可使机械臂呈现“C”形,且近似一段圆弧;如果在另一个平面内再用一对线将关节串联起来,那么通过两对线的拉伸,机械臂可呈现一个空间“C”形.
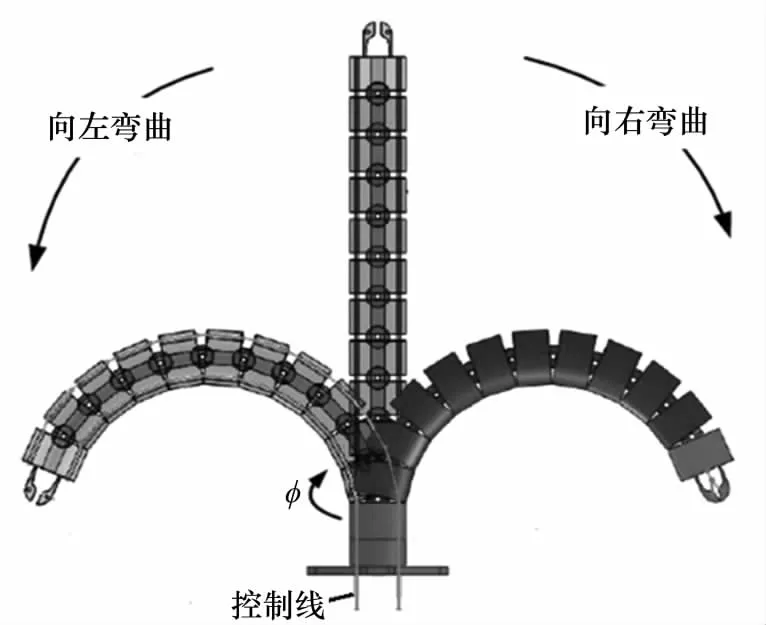
图2 拉线机构机械臂[4]Fig.2 Robot arm based on wire-driven mechanism[4]
2 鱼类体干波曲线与拉线机构仿真
鱼类根据身体参与运动的多少可以分为两大类:摆动(oscillitory)方式和波动(undulatory)方式.以摆动方式游动的鱼,其身体参与波动的部分较少,身体大部分是僵硬的,并不呈现波的形状;而以波动方式游动的鱼,其身体参与波动的部分较多,有的鱼类身体全身参与波动,在前进时身体呈现波的形状[7].鱼类专家通过对鱼类游动机理的研究,分析得出鱼体的体干曲线为一波幅逐渐增大、由头部至尾鳍传播的、具有特定波长和频率的行波.根据体干曲线的波动特征,可用鱼体波幅包络线和行波曲线的合成来进行数学描述[8].波幅包络线用二次多项式函数表示,行波曲线由正弦函数表示.公式(1)给出了一种最常用的形式:
y(x,t)=(c1x+c2x2)·sin(kx+wt) (1)式中:c1和c2分别为一次波幅包络线系数和二次波幅包络线系数;k为体干波数;w为体干波频率,进一步地,k=2π/λ,w=2π/T;λ为体干曲线波长;T为体干波周期[9].取 c1=0.05,c2=0.0835,k=0.6,w=3.86,得到鱼游动的体干曲线(图3).5条曲线分别是时间t=0T,t=0.25T,t=0.5T,t=0.75T和t=T时的曲线.图3中BL为体长(body length).
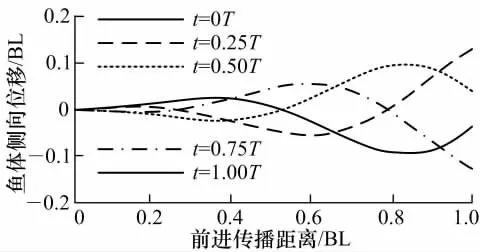
图3 鱼游动的体干曲线Fig.3 Body curve of fish swimming
在拉线机构中,鱼游动的体干曲线可以用圆弧来拟合,而传统的串联驱动结构的机器鱼相当于用线段来拟合鱼游动的体干曲线.在Matlab上用这两种方式对鱼类体干曲线进行了仿真和对比(图4).
图4中左列的4幅图分别是用3段线段、3段圆弧去拟合鱼游动的体干曲线;右列4幅图分别用6段线段、3段圆弧来拟合鱼游动的体干曲线.每列的4幅图分别表示在周期为0.25T,0.5T,0.75T和T时的曲线,其中实线表示理论上的鱼体干曲线,虚线表示用线段拟合的曲线,星号点表示用圆弧拟合的曲线.

图4 线段拟合与圆弧拟合鱼体干曲线Fig.4 Body curve fitted by straight line and fitted by circular arc
通过对比可知,用圆弧拟合误差远小于用线段拟合,即使用6条线段来拟合,效果也远不如用3段圆弧拟合的结果.这也间接说明用串联电机驱动机器鱼的方式并不能很好地去拟合鱼游动的体干曲线.
此外,采用FEA方法,用Fluent软件对机器鱼进行了流体力学仿真,根据拉线机构的运动学特点,采用圆弧拟合鱼类体干波曲线得到图5.
目前大部分机器鱼采用多关节多电机串联结构,这种结构的机器鱼由于一个电机控制一个关节,使得系统复杂,控制起来相对困难,在流体力学仿真中,这种结构相当于用线段拟合鱼体干波曲线,其结果如图6所示.

图5 拉线机构机器鱼流体力学仿真Fig.5 Simulation of fluent dynamics for wire-driven robot fish

图6 采用多关节多电机串联结构机器鱼流体力学仿真Fig.6 Simulation of fluent dynamics for multi-connection driven robot fish
在流体力学仿真的基础上,相同条件下将拉线机构的机器鱼与传统的机器鱼做了游动效率以及游速的对比(图7).

图7 拉线机构的机器鱼与常规机器鱼的性能对比Fig.7 Comparison of wire-driven robot fish and multi-connection driven robot fish
图7展示了基于拉线机构的机器鱼与常规多关节串联驱动机器鱼的性能对比,其中线段①是拉线机构机器鱼流体力学仿真结果,线段②是3关节机器鱼流体力学仿真结果.图7a)中描述的是在不同摆动幅度下两种机器鱼的游动效率,图7b)描述的是在不同摆动幅度下两种机器鱼的游动速度.从图中可以看出:基于拉线机构的机器鱼性能无论是游动效率还是游动速率都要优于常规机器鱼,因此,本文研究的机器鱼在整体性能上都要优于常规机器鱼.
基于拉线机构机器鱼的独特优势,设计了一款以拉线机构为尾部推进器的机器鱼.其尾部结构示意如图8.

图8 尾部结构示意[10]Fig.8 Structure of the tail[10]
该机器鱼采用2个椎节组串联的结构形式,线驱动推进机构由2个电机驱动,每个电机轴上都固定着一个转动圆盘,每对金属线的2条金属线分别从相反方向绕在同一个转动盘上并固定住.当电机转动时,绕线轮将一边的线缩短,另一边的线加长,基于拉线机构的尾部就会向线缩短的一侧偏转,这样就能通过控制电机的转动来驱动鱼尾摆动.线驱动推进机构的运动是2个椎节组独立运动的叠加,通过对2个椎节组的控制,可使线驱动推进机构呈现不同的运动方式,在金属线的作用下,每个椎节组可以做“C形运动”,当2个椎节组的弯曲方向一致时,线驱动推进机构做“C形运动”,即摆动的运动方式,反之则做“S形运动”,即波动的运动方式.
3 机器鱼样机及其控制
机器人的控制系统选择舵机作为控制电机,是因为舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统.在仿生机器鱼游动性能的测试过程中,需要测试机器鱼在不同摆幅和频率下的游动性能,因此,舵机作为控制电机是比较好的选择.本研究采用Hitec HS-7940TH舵机,基于ATmega16的控制板,1300 mAh蓄电池,基于陀螺仪的姿态仪芯片,蓝牙模块,以及对应的电脑适配器.整个系统搭建后的系统硬件图以及机器鱼样机如图9,10所示.

图9 硬件系统Fig.9 Hardware system

图10 机器鱼整体Fig.10 Overall of the robot fish
整个系统的运作过程如图11所示.
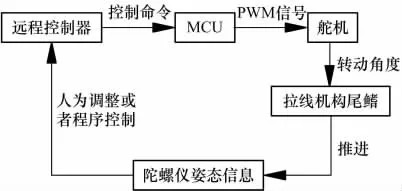
图11 机器鱼控制方案Fig.11 Control strategy of robot fish
首先由远程控制器(手机或者电脑)发出命令,通过蓝牙接收,控制器接收到相关命令后,由MCU产生PWM信号给舵机,舵机以一定的规律转动相应的角度,驱动拉线机构的尾部,使得机器鱼以一定的方式推进.机器鱼游动的姿态以及速度、加速度信息通过姿态仪芯片获取,并通过蓝牙传回电脑,以供采用相应的控制策略.目前主要是通过姿态仪芯片获取机器鱼游动姿态的数据用于分析,其控制主要是人为调整.
为了计算出机器鱼尾部控制参数与舵机转动角度之间的关系,本研究简化拉线机构尾鳍的设计参数并给出了简化的结构示意图(图12).对于由两个相邻椎节构成的一个关节单元,图12给出了其转动的示意简图:a)图表示两椎节处于初始位置;b)图表示两椎节相对转动了一定的角度.Hi为椎节的高度;h0为初始关节间隙;hβ为穿过关节间隙的初始线长;Li为两椎节接触时的外圆直径;di为椎节上表面两线孔的中心距;Di为椎节下表面两线孔的中心距;β为线孔倾斜角;θ为关节转动角度[11].通过对该结构进行分析,线长的改变与关节转动角度之间的关系可以用公式(2)描述.在分析过程中,简化了几何结构,并假定关节转动的角度相对较小,因此有sin θ≈θ,则关节间线长变化与转动角的关系为:式中:di=Di-2Hi·tan β.当线的倾斜度比较小时,可以进行以下近似:式中:Δhβi和Δhβi分别为两边的线长相对于初始位置的改变大小.假定机器鱼尾部的总变形为Θ,每个关节的最大转动角为θmax,N为椎节数量,则有:

图12 关节转动示意[11]Fig.12 Concise illustration of vertebras′motion


通过这些计算可以得到舵机所需的转动角度,从而得到控制机器鱼尾部运动的关键参数.
此外,对机器鱼进行了相应的水中实验,测试了在不同摆幅、频率下的游速,还对比了在不同的游动方式下机器鱼的游速以及效率.本文主要集中讨论仿真分析与控制策略,对实验部分不做详细介绍,仅给出部分实验曲线图.图13给出了机器鱼巡游速度与摆动幅度之间的关系(摆动频率固定为1Hz).

图13 速度与摆幅的关系结果对比Fig.13 Experimental results of velocity and amplitude
从图13中的曲线可得出,实验结果与理论的预测趋势非常一致,机器鱼的巡游速度随着摆动幅度的增大而增加,并且增加幅度逐渐减小.
图14给出了机器鱼巡游速度与摆动频率之间的关系(摆动幅度固定为60°).
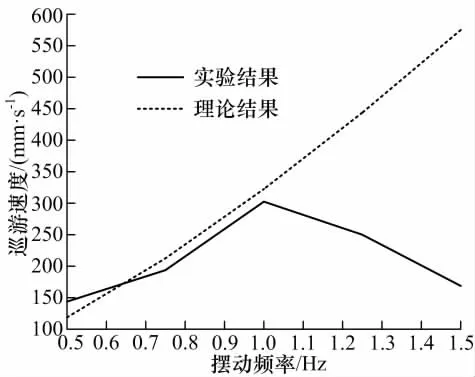
图14 速度与频率的关系结果对比Fig.14 Experimental results of velocity and frequency
理论预测显示,机器鱼的巡游速度与摆动频率成线性关系,这与鱼类学家的研究结果是一致的.实验结果表明:当摆动频率在1 Hz以内时,实验结果与理论趋势近似一致;而当摆动频率大于1 Hz时,机器鱼的游速呈下降趋势,与理论预测严重不符.通过分析,这主要由以下原因引起:①由于用于实验的水池比较小,当摆动频率加快时,水池中的水变得紊乱,影响了机器鱼的性能;②电机的响应速度有限,当程序设定的频率过高时,电机实际的转动角度下降,导致尾鳍实际的摆动幅度下降.经测量得到:当设定的摆动频率为1.25 Hz时,实际的摆动幅度为40°.当设定的摆动频率为1.5 Hz时,实际的摆动频率只有30°,仅为程序设定幅度的50%.这大大影响了机器鱼的巡游速度.
4 结论
文中首先介绍了拉线机构的特点及其应用,阐述了基于拉线机构的机器鱼的运动仿真分析,根据Lighthill的鱼类干波曲线,结合拉线机构的特点进行了运动仿真分析,对比了传统的多关节串联驱动机器鱼的仿真分析结果.结果表明:基于拉线机构的机器鱼能够很好地匹配理论上的鱼体干波曲线.同时还制作了机器鱼样机和控制系统,提出了有效的控制策略,用于进一步分析研究基于拉线机构的机器鱼的性能.
References)
[1] 童秉钢.鱼类波状游动的推进机制[J].力学与实践,2000,22(3):69 -74.
[2] Michael Sfakiotakis D M L,Davies J Bruce C .Review of fish swimming modes for aquatic locomotion[J].IEEE Journal of Oceanic Engineering,1999,24(2):237 -252.
[3] Epps B P,y Alvarado P V,Youcef-Toumi K,et al.Swimming performance of a biomimetic compliant fishlike robot[J].Experiments in Fluids,2009,47(6):927-939.
[4] Li Zheng,Du Ruxu,Lei M C,et al.Design and analysis of a biomimetic wire-driven robot arm[C]∥International Mechanical Engineering Congress and Exposition.USA:A-merican Society of Mechanical Engineers.2011,191 -198.
[5] Laschi C,Mazzolai B,Mattoli V,et al.Design of a biomimetic robotic octopus arm[J].Bioinspiration & Biomimetics,2009,4:015006.
[6] Li Zheng,Du Ruxu,Lei M C,et al.Design and analysis of a biomimetic wire-driven robot arm[C]∥International Mechanical Engineering Congress and Exposition.USA:A-merican Society of Mechanical Engineers.2011:191 -198.
[7] Rossi C,Colorado J,Coral W,Barrientos A.Bending continuous structures with SMAs:a novel robotic fish design[J].Bioinspiration & Biomimetics,2011,6:045005.
[8] Lighthill M.Note on the swimming of slender fish[J].Journal of Fluid Mechanics,1960,9:305 -317.
[9] Li Zheng,Du Ruxu.Design and analysis of a biomimetic wire-driven flapping propeller[C]∥Biomedical Robotics and Biomechatronics(BioRob),2012 4th IEEE RAS &EMBS International Conference.[S.l.]:IEEE,2012:276-281.
[10] Liao Baofeng,Li Zheng,Du Ruxu.Robot Tadpole with a novel biomimetic wire-driven propulsor[C]∥Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics.Guangzhou,China:IEEE,2012:11 -14.
[11] Zhong Yong ,Li Zheng,Du Ruxu .The design and prototyping of a wire-driven robot fish with pectoral fins[C]∥2013 IEEE Int Conf on Robotics and Biomimetics.Shenzhen,China:IEEE,2013:12 -14.
猜你喜欢
科学技术与工程(2022年23期)2022-09-30
环球时报(2022-07-13)2022-07-13
环球时报(2022-03-14)2022-03-14
哈尔滨轴承(2021年1期)2021-07-21
今日自动化(2020年1期)2020-07-23
小学科学(2020年11期)2020-03-04
电影(2018年8期)2018-09-21
三峡大学学报(自然科学版)(2017年1期)2017-03-20
天津诗人(2014年4期)2014-11-14

- 江苏科技大学学报(自然科学版)的其它文章
- SCR催化剂内流动与反应过程的研究