一种基于纹理特征的车道线检测方法研究
2014-02-28 05:58党宏社郭楚佳
重庆交通大学学报(自然科学版) 2014年5期
党宏社,郭楚佳
(陕西科技大学 电气与信息工程学院,陕西 西安 710021)
随着经济的发展,交通压力日益增大,行车安全成为了瞩目的焦点,安全驾驶辅助系统也成为研究的热点。在车道偏离预警、防碰撞预警等预警系统中,车道线检测具有十分重要的作用。只有准确检测车道线,才能定位车辆实际相对位置,进而确保行车安全。
现阶段检测车道线的方法主要有以下几种,归于相同特点区域的域增长法[1]。这种方法需要不断准确定义区域增长的起始点;对直线有很好的识别效果的Hough变换法[2-3],但其识别结果过分依赖于图像分割的结果;基于颜色突变的阈值分割法[4-5],对于有强光照、阴影或路面有部分脏污等情况,鲁棒性较弱。故而对于车道线的检测需要寻求一种受外界干扰较小的特征量,针对这种特征进行车道线识别拟合。
在采集到的车道图像信息中,近景处的信息相对于远景处较为全面,识别准确率也会相对较高,但是车道线拟合过程中,需要整条车道线的离散点信息,才能准确拟合,对于远景部分,往往会存在较大的偏差。由于车辆长期路过碾压,路面上会形成一定的车辙印,在得到的图像中十分明显,而对于有强光照强阴影的路面,其局部纹理方向依旧为车辆行驶方向,故而,可以采用车辙印纹理特征实现车道线的检测。
本方法在车道线识别过程中,通过对近景处的车辙印纹理特征,分5个尺度、8个方向进行Gabor变换,并对特征图进行融合,分析其纹理方向,通过投票机制选取车道线消失点位置,进而利用消失点,建立扇形扫描区域,定位车道线,拟合车道线直线方程(图1)。本方法利用近景处的纹理特征,可以弥补远景处图像分割不准确引起的车道线拟合失败的不足。

图1 图像在5个尺度8个方向的Gabor变换结果Fig.1 Gabor transformation results at 5 scales in 8 directions
1 理论基础
笔者主要按照Gabor变换、消失点检测、及车道线直线方程确定几个步骤说明基于纹理特征的车道线检测方法的理论基础。
1.1 基于Gabor变换的纹理识别
Gabor变换是D.Gabor 1946年提出的[6]。由于Gabor函数在频率和方向上的表达方式与人类视觉系统很相似,所以被用来表达纹理的特征。近年来Gabor滤波已经被广泛用于人脸识别[7]及指纹识别[8],利用Gabor核函数对纹理特征进行变换,可以最大程度的凸显纹理方向特征。
对于方向Φ和尺度ω,Gabor滤波核函数如式(1)[9]:
(1)
式中:a=xcosΦ+ysinΦ;b=-xsinΦ+ycosΦ;c=2.2。
选取5个尺度、8个方向,一共40个模板进行滤波计算。不同尺度可以反映出不同强度的纹理特征,不会丢失与单一模板尺度不匹配的纹理信息。由于透视成像原理,车道中的车辙印方向分布在0~π之间,故而滤波器的方向选择为8个,即在0~7/8π之间每间隔π/8取一点,分别在不同尺度使用8方向滤波器组来提取车辙印纹理的方向特征,其融合图像见图2。
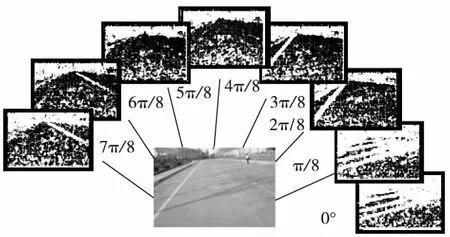
图2 8个方向上5个尺度的融合图像Fig.2 Fusion image of 5 scales in 8 directions
设I(x,y)为一灰度图像的(x,y)点,图像I与方向Φ和尺度ω下的Gabor核的卷积,定义如式(2):
Gω,Φ=I⊗ψω,Φ
{Gω,Φ:ω∈(1,…,4),Φ∈(1,…,7)}
(2)
在Z=(x,y)点的卷积结果也分为实部与虚部两部分,为了更明显的综合细节纹理特征,在方向判别之前将响应的值取为实部与虚部的平方和,如式(3):
Iω,Φ(z)=Re[Gω,Φ(z)]2+Im[Gω,Φ(z)]2
(3)
某一方向Φ下的响应值定义为该方向不同尺度ω的变换结果的融合,为均匀得到每个尺度的信息,取不同尺度结果的平均值,如式(4):
RΦ(z)=AverageωIω,Φ(z)
(4)
得到的融合结果,对于8个不同方向的图像响应各不相同,与图像纹理方向相同的区域响应相对较强,而与图像纹理方向相悖的区域响应相对较弱。
笔者采取最大值的方法,由8个方向的融合图像得到原图像中对应点的方向索引值,即局域纹理的方向由每个像素点的8个Gabor方向特征最大值的索引来评估,如式(5):
(5)
式中:RΦ(z),Φ∈(0,…,7)对应像素点z=(x,y)在8个方向上的Gabor特征(RΦ(z)为融合后特征图,包含Gabor特征的实部、虚部),在此将k作为融合编码,T(z)=k,k∈(1,…,8),T(z)∈[1,8],每个编码值表征一种局部方向,对应模板的8个不同方向,最终每个车道图片转化为多方向特征的融合图像。其对应融合编码索引值如表1。
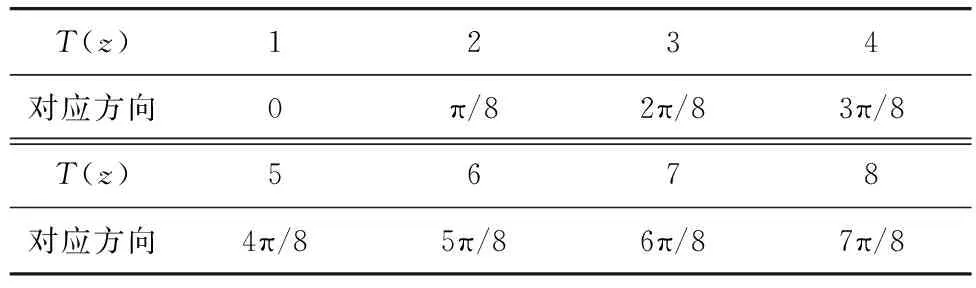
表1 融合编码索引值
1.2 消失点的选取
由透视原理可知,凡是平行的直线都消失于无穷远处的同一个点,则以道路方向为视觉方向,两条平行的车道线会交于远处的某一点,这点在透视图中就叫做消失点。由于消失点是车道线以及与其平行所有纹理直线的视觉相交点,检测消失点对于准确的估计车道线位置有着重要意义。
由于路面近景处的路面车辙信息较为丰富且明显,故而选择图中近景处中心全景3/4的区域作为参与投票点。假设V1,V2,V3为图像I(x,y)中的3个消失点的待选点,其融合编码索引值分别为T1(z),T2(z),T3(z),图像为m×n维。
设P为其中的任意一点,根据对应融合编码索引值T1(z),T2(z),T3(z),查找其纹理方向,P点与候选消失点的连线方向设为(PV1),(PV2),(PV3)。若3点的连线方向与纹理方向的夹角均大于π/6则判定投票点失效,继续选取下一投票点进行投票,直至分析完成所有投票点,统计V1,V2,V3这3点的投票结果,若某一点的投票结果明显高于另两点,则可以判定这一点为标准消失点,如图3。
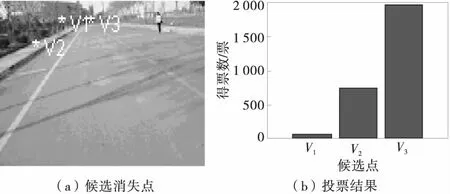
图3 候选消失点及其投票结果Fig.3 Candidate vanishing points and their voting results
1.3 确定车道线方程
消失点蕴含了直线的方向信息,从一个消失点出发,可以找到经过该点的所有直线,每条车道线均经过消失点,并且道路边缘检测所得的两条车道线对应直线是以不同斜率通过消失点的,故而可以据其准确检测车道线位置。
假设经过投票所得的消失点为V(xv,yv),在其下方π/6~5π/6的扇形区域建立扇形扫描区域,每间隔π/180设置一条定标线,编号为li,i∈[1,120],建立120项数组C,当li覆盖的点值为1,则设置Ci加一,累计完成可得统计数组C,假设:
(6)
(7)
则两条车道线表示如式(8)及式(9):
(8)
(9)
2 算法设计
其具体算法设计如下:
20世纪70年代,Wilkins(1972)对词汇知识在语言使用中的重要性有过精辟的论述:“没有语法,很多东西无法表达;没有词汇,什么东西也无法表达。”对于母语学习者和外语学习者以及教师来讲,词汇是相当重要的学习和讲授的内容(Gass&Selinker,2001)。词汇量大小对学习者很重要,但是要求学生每时每刻都拿着单词本来背记,或者老师上课时主要讲单词的用法,都是不现实的。教师应鼓励学生进行广泛的阅读,比起任何孤立的外显教学课程,这样的阅读更能大大增加词汇量(Coady&Huckin,1997)。
输入:一幅彩色图像Im×n×3
输出:标记车道线位置的彩色图像
1)对原图Im×n×3进行均值滤波,并将其转化为灰度图像;
2)根据式(1)生成Gabor滤波核函数,通过Gabor核函数和式(2)、式(3)对图像Im×n×3进行卷积,方向Φ和尺度ω下的卷积图像记为Iω,Φ(z),并计算融合纹理特征图像,根据式(4)分别将8个方向上、不同5个尺度的Gabor变换结果进行融合,将Φ方向上的融合图记为RΦ(z);
3)根据式(5)和表1对每一候选投票点的方向进行标记,记其方向编码为T(z);
4)对候选消失点进行投票,利用索引值T(z)对应的方向信息与候选消失点进行匹配投票,得票明显高于另两点的点即为标准消失点:V(xv,yv);
5)根据式(6)~式(9)推导实际车道线直线方程,y1与y2;
6)在图像Im×n×3中绘制y1与y2两条车道线。
3 实验结果与分析
为验证文中算法对各种情况下车道线的检测效果,选取了多类图片进行实验,如强光照、强阴影、路面颜色干扰等,在利用OTSU自动阈值分割法对图像进行二值化分割,图像中存在较多的干扰,包括天空及路边人行道,由于色彩相近,都得不到很好的分割。
在MATLAB 2008b环境下,用直接Hough直线检测方法[10]以及上述算法对多幅道路图像进行了识别和验证。实验结果如图4。

图4 仿真结果Fig.4 Simulation results
Hough直线检测方法对于亮度较高的、连续的直线有较好的拟合效果,但是Hough变换法受天空及路面阴影影响较大,对于有强光照、强阴影、路面干扰的情况,并不能很好的检测出车道线位置,并且,其车道线检测结果过分依赖于图像二值化结果,而对于复杂路面环境,二值化的结果本身就无法完全表示路面车道线及道路边沿的实际情况,故而引起Hough直线检测的误判断。相比,本方法利用图像近景处点的方向纹理特征进行消失点的检测,通过消失点进行车道线的定位,对于强光照、强阴影和路面颜色干扰都具有较好的检测效果。
4 结 论
在车道线检测方法中,最需要考虑车道线的实际情况,积水、淤泥和破损等情况都会影响车道线的连续性,公路上其它标示如斑马线都会影响车道线的检测。分析与计算机仿真实验表明,笔者所提出的基于道路纹理特征提取道路消失点的方法是有效的。此方法对复杂背景下的车道线检测有较好的效果,对强光照、阴影等因素不敏感,可以不依赖于图像分割的结果,准确识别车道线。
[1] 陈勇,黄席樾,唐高友,等.基于机器视觉的车道检测与二维重建方法[J].仪器仪表学报,2007,28(7):1205-1210.
Chen Yong,Huang Xiyue,Tang Gaoyou,et al.Lane detection and two dimensional rebuilding based on machine vision [J].Chinese Journal of Scientific Instrument,2007,28(7):1205-1210.
[2] Ghazali K,Xiao Rui,Ma Jie.Road Lane Detection Using H-Maxima and Improved Hough Transform[C]// Proceedings of 4thInternational Conference on Computational Intelligence,Modeling and Simulation.Kuantan,Malaysia:CIMSim,2012:205-208.
[3] Chen Long,Li Qingquan,Mao Qingzhou,et al.Block-Constraint Line Scanning Method for Lane Detection[C]//Intelligent Vehicles Symposium (IV).San Diego,CA:IEEE,2010:89-94.
[4] 孙波成,秋延峻.基于图像处理的路面裂缝识别研究[J].重庆交通大学学报:自然科学版,2008,27(1):61-64.
Sun Bocheng,Qiu Yanjun.Pavement cracks identification using image technology [J].Jourmal of Chongqing Jiaotong University:Natural Science,2008,27(1):61-64.
[5] 沈瑜,罗维薇,王小鹏,等.一种新的车道线快速识别算法[J].计算机应用研究,2011,28(4):1544-1550.
Shen Yu,Luo Weiwei,Wang Xiaopeng,et al.Novel algorithm of fast lane identification [J].Application Research of Computers,2011,28(4):1544-1550.
[6] Gabor D.Theory of communication (Part 1:The analysis of information) [J].Electrical Engineers III,1946,93(26):429-441.
[7] Arindam K,Bhattacharjee D,Dipak K B,et al.High performance human face recognition using independent high intensity Gabor wavelet responses:a statistical approach [J].International Journal of Computer Science & Emerging Technologies,2011,2(1):178-187.
[8] 侯洪丽,张宵霞,王福明.基于Gabor函数能量特征的指纹增强[J].电子测试,2011,5(5):19-22.
Hou Hongli,Zhang Xiaoxia,Wang Fuming.Fingerprint enhancement based on Gabor functional energy features [J].Electronic Test,2011,5(5):19-22.
[9] 赵英男,孟凡斌,金忠.Gabor核函数的设置研究[J].计算机科学,2009,36(1):111-113.
Zhao Yingnan,Meng Fanbin,Jin Zhong.Research on design of Gabor kernels’ windows [J].Computer Science,2009,36(1):111-113.
[10] 段汝娇,赵伟,黄松岭,等.一种基于改进Hough变换的直线快速检测算法[J].仪器仪表学报,2010,31(12):19-22.
Duan Rujiao,Zhao Wei,Huang Songling,et al.Fast line detection algorithm based on improved Hough transformation [J].Chinese Journal of Scientific Instrument,2010,31(12):19-22.
猜你喜欢
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
软件(2020年3期)2020-04-20
摄影之友(影像视觉)(2018年12期)2019-01-28
Coco薇(2017年8期)2017-08-03
Coco薇(2015年5期)2016-03-29
中国交通信息化(2015年10期)2015-06-06
小说月刊(2014年5期)2014-04-19
吐鲁番(2014年2期)2014-02-28