菠萝采摘机械化的发展探索
2014-02-18 07:18廖劲威朱余清吴伟斌冯运琳许棚搏詹潇智
现代农业装备 2014年5期
廖劲威,朱余清,2,3,罗 阔,2,3,吴伟斌,2,3※,冯运琳,许棚搏,詹潇智
(1.华南农业大学工程学院,广州 510642;2.华南农业大学南方农业机械与装备关键技术教育部重点实验室,广州 510642;3.国家柑橘产业技术体系机械研究室,广州 510642;)
菠萝采摘机械化的发展探索
廖劲威1,朱余清1,2,3,罗 阔1,2,3,吴伟斌1,2,3※,冯运琳1,许棚搏1,詹潇智1
(1.华南农业大学工程学院,广州 510642;2.华南农业大学南方农业机械与装备关键技术教育部重点实验室,广州 510642;3.国家柑橘产业技术体系机械研究室,广州 510642;)
本论文介绍了现今国内外农业果园采摘技术,分析了菠萝采摘技术研究发展的优势与不足。通过总结国外水果采摘的研究成果,分析了各种果园机械的优势特点及其发展现状,对菠萝产业机械化进行分析。针对菠萝地机械化作业在国内外尚处于发展起步期的现状,以及现今菠萝机械化存在的问题,本论文指出了菠萝机械化进程的研究方向和未来的发展趋势。
菠萝 采收运输 机械化 研究现状 发展趋势
0 引言
菠萝作为热带名果,目前种植地区和国家约有70个,年产量约占世界水果总产量的5%。菠萝在热带水果贸易中属于最大宗的品种之一[1],从2005年起,我国已成为世界第三的菠萝生产大国;到2011年,我国菠萝生产总面积约56万hm2,总产量约119万t。在我国大陆,菠萝的主要集中种植地为广东雷州半岛、海南岛东部和西北部[2];主要种植地区为广东、海南、广西、云南、福建和台湾等省区[3]。在台湾,菠萝是重要的经济果树[4];在海南,菠萝是种植面积和产量仅次于香蕉和芒果的第三大水果[5]。随着人们生活水平的提高和对热带水果的热爱,菠萝产业得到了较好的发展,菠萝种植面积有所提高。
菠萝采摘季节性较强,只有半个月左右的收获的高峰期。目前除了少数果园配备半机械化辅助装置,国内水果主要以人工采收为主;整个采收作业短期内需要的人力,占到了整个菠萝生产成本的40%。在劳动力日益缺乏的情况下,菠萝农户希望能够通过机械化管理改变现状[6]。所以,研究开发菠萝采收机械与装备,对应缓解劳动力短缺,稳定采摘作业质量,减轻劳动强度,提高采摘生产效率和菠萝收获输送效率有重要意义,是未来发展的趋势。
1 国内外果园采收运输的研究进展
1.1 国内研究进展
1.1.1 菠萝采收机械双目视觉平台搭建与田间试验
菠萝采摘机械的关键部件之一是视觉系统,可为采摘终端提供待采果实的位置导航信息,平台结构如图1。

图1 双目视觉平台结构
该研究选取双目视觉技术(图2),基于双目视觉标定平台开发的菠萝果实识别算法,采用低成本的CMOS视觉传感器,辅以三脚架、双目云台、计算机和软件系统。
通过湛江菠萝田间的三维位置计算试验发现,当果实测试距离小于1 m时,由图像深度显示出的位置误差(注:depth errors)范围为6~8 cm,经软件算法校正,误差范围控制在2~3 cm内,试验效果良好[7]。
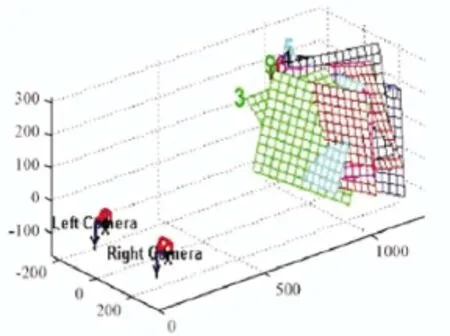
图2 双目摄像机的构成
1.1.2 基于单目视觉的田间菠萝识别
在菠萝采摘视觉系统中,对果实的准确识别是关键。鉴于菠萝田间的复杂环境,单目视觉系统在识别过程中采用图像处理技术、数学形态学方法,识别确定菠萝果眼位置并获取果眼中心点信息;以最多点集的中心坐标,作为菠萝区域的近似形心。经过广东湛江菠萝田间进行的单目视觉识别实验,以拍摄的35幅图像作为样本运算,在迎光条件下的形心识别正确率达到85%[8]。图3为基于单相视觉的菠萝识别图。

图3 基于单相视觉的菠萝识别
1.1.3 其他果园采摘机械发展
我国南方果园多以丘陵山区地带为主,坡地地形限制了机械化的发展,且工时花费和作业危险性相比平地也更为突出[9]。
自20世纪90年代以来,许多院校和研究学者经过不懈努力在水果采摘方面取得了很大的进展:
孙明等不仅开发了以果实识别系统为基础的苹果采摘机器人,还成功研究了一种使二值图像的像素分割正确率大于80%的彩色图像处理技术[10];南京农业大学的姬长英等人将双目立体视觉技术应用于番茄采摘中,对红色番茄进行采摘定位[11]。上海交通大学的曹其新等开发了以彩色图像处理技术和神经网络为基础的草莓拣选机器人[12]。
1.2 国外发展现状
1.2.1 机械式采摘方式
从20世纪40年代开始,国外由简易采摘器发展到振摇式采摘机械,再到后来的切割式采摘机[13]。图4所示为美国生产使用的机械式菠萝采摘机。
1.2.2 机器人采摘方式
目前国外在采摘机械方面的研究方向偏向于采
摘机器人。
采摘机器人主要由机械手、末端执行器、视觉识别系统和行走装置等4大系统组成。20世纪80年代,日本京都大学的Noboru Kawamura等人研制了五自由度关节型机械手[14],但这种机械手工作空间有限,可操作度低。

图4 美国机械式菠萝采摘机
2 问题展望
2.1 我国菠萝采收运输的主要问题
2.1.1 品种结构不合理,导致采收作业困难
我国的菠萝种植以农户自发为主的,种植的菠萝多以生鲜食用,缺乏深加工。种植品种的选定决定了收获高峰期采收运输的压力紧张,加工企业平时原料不足,收获季节却原料过剩[15]。
2.1.2 果园地设施落后 造成果体损伤
菠萝园地的规划多为裸露地种植或是与甘蔗、橡胶等轮作。而且因为灌溉条件不足,粗放、缺水肥的种植条件往往导致菠萝产量和质量无法保证。由于园区道路欠佳,缺少采收清洗处理、分拣、包装和贮存等条件设施,常温“堆放式”的长途运输容易造成鲜果损伤,影响质量[15]。
2.1.3 政府支持力度不够 菠萝产业受影响
据WTO有关规定估算得知,相比美国、欧盟、日本等发达国家,我国政府对亚热带作物的支持相对较低。对菠萝加工企业的税费负担同时加重了企业在国际上的竞争劣势地位[15]。
2.2 菠萝采摘机的发展趋势
2.2.1 发展机械手和末端执行器
就菠萝产业存在的问题,在研究过程中可以通过提高机械手和末端执行器的柔性和灵巧性,提高采摘的成功率,降低果实的损伤率[16]。
1)机械手。机械手的自由度数作为衡量机器人性能的重要指标,它直接决定了机器人的运动灵活性和控制的复杂性[17]。荷兰农业环境工程研究所(IMAG)发明了一种电极切割法,利用特殊电极产生高温(1 000℃)切割,可防止端口的感染[18]。
2)末端执行器。采摘对象的特征和采摘方式决定了末端执行器的基本结构,必须同时兼顾采摘对象的生理特性、机械特性和理化特性,才能进行设计末端执行器。目前,末端执行器都是专用的。为避免碰伤果实,大多采摘机器人的手指内侧接触果实的部位采用尼龙或橡胶材料[17]。
2.2.2 菠萝采摘机未来发展的建议
在国内果园采摘机械化迅速发展环境下,菠萝地采摘作业的研究多以采摘末端或机械手为主,采收运输一体化的机械基本上仍处于样机阶段。为了促进菠萝采运的发展,还可以从以下几个方面进行努力:
1)提高适应性,满足菠萝地运行。菠萝地的植物冠层随着生长状态不同高度不一,需要底盘离地间隙可调,方便采收管理。
2)设计操作简便、可靠性高、成本较低的机械。机器的操作者是农民,不是具有机电知识的工程师,这就要求结构设计合理可靠,使用方法简单,维修维护方便。
3)提高轮胎附着力。菠萝地具有独特的砖红壤特性,普通车用轮胎不适用,需要根据轮胎的附着力对轮胎选型。
4)发展自动化和智能化。因菠萝地行株距小,菠萝成熟后,菠萝叶相互交错,连人都难以进入。同时随着现代科学技术的进步和广泛应用,机械化、自动化、智能化水平将进一步提高,因此可以通过轻简化的作业机械,发展自走式平台以适应菠萝地的采收运输[13]。
[1]易干军,王举兵,祁春节,等.中国菠萝竞争力的国际比较[J].世界农业,2007(7):20-22.
[2]刘传和,刘岩.我国菠萝生产现状及研究概况[J].广东农业科学,2010(10):65-68.
[3]张德生,何长辉.中国菠萝生产与产业链分析[J].热带农业工程,2011(1):38-42.
[4]台湾菠萝产业现状[J].柑桔与亚热带果树信息, 2005,21(5):25-27.
[5]张恒.2003年海南省统计年鉴[M].中国统计出版社,2003:506.
[6]杨洲,严梁立,李君,等.果园采运机械化装备与技术[C]//中国农业工程学会2011年学术年会论文集.重庆,2011.
[7]李斌,王海峰,黄文倩,等.菠萝采收机械低成本双目视觉平台搭建与田间试验(英文)[J].农业工程学报,2012,28(增刊2):188-192.
[8]李斌,汪懋华,李莉.基于单目视觉的田间菠萝果实识别[J].农业工程学报,2010(10):345-349.
[9]蓝峰,苏子昊,黎子明,等.国内外果园采摘机械的研究及发展探讨[C]//2010国际农业工程大会“十二五”低碳农业装备技术创新研究分会场论文集.上海,2010.
[10]周天娟,张铁中.果蔬采摘机器人技术研究进展和分析[J].农业机械,2006(22):38-39.
[11]张洁,李艳文.果蔬采摘机器人的研究现状、问题及对策[J].机械设计,2010,27(6):1-4.
[12]曹其新,吕恬生,永田雅辉,等.草莓拣选机器人的开发[J].上海交通大学学报,1999(7):880-884.
[13]蓝峰,苏子昊,黎子明,等.果园采摘机械的现状及发展趋势[J].农机化研究,2010(11):249-252.
[14]Noboru Kawamura Kiyoshi Namikawa.Robots Inagriculture[J]. Adv Robotics, 1989,3(4): 311-322.
[15]董定超,李玉萍,梁伟红,等.中国菠萝产业发展现状[J].热带农业工程,2009(4):13-17.
[16]崔玉洁,张祖立,白晓虎.采摘机器人的研究进展与现状分析[J].农机化研究,2007(2):4-7.
[17]姜丽萍.番茄力学特性及其在采摘机器人执行器设计中的应用[D].江苏:江苏大学,2006.
[18]周增产, Bontsema J.,VanKollenburg-Crisan L.荷兰黄瓜收获机器人的研究开发[J].农业工程学报,2001,17(6):77-80.
Exploring the Development of Pineapple Harvesting Mechanization
Liao Jingwei1,Zhu Yuqing1,2,3,Luo Kuo1,Wu Weibin1,2,3※,Feng Yunlin1,Xu Pengbo1,Zhan Xiaozhi1
(1.College of Engineering,South China Agricultural University,Guangzhou 510642,China 2.Key Laboratory of Key Technology on Agricultural Machine and Equipment,Ministry of Education,South China Agricultural University,Guangzhou 510642,China 3.China Division of Citrus Machinery,China Agriculture Research System,Guangzhou 510642,China)
This paper gives an introduction to the current agricultural orchard picking technology at home and abroad,also analyses the advantages and disadvantages of the pineapple picking technology on research and development.Through the summary of research results of foreign fruit picking,it lists the advantages and disadvantages of various engineering machinery.Aiming at the pineapple mechanization is still in the initial stage of the development situation at home and abroad,and the problems that exist in nowadays pineapple mechanization,the paper points out the research direction and development trend of pineapple mechanization process in the future.
Pineapple;Harvesting and transport;mechanization;Research actuality;Development trend
惠州市产学研结合项目(2013B050013015);公益性行业(农业)科研专项合作研究任务(201403036,201203016-3)
廖劲威(1990-),男,汉族,广东信宜人,华南农业大学工程学院研究生,研究方向为车辆故障诊断与电子技术。
※通讯作者:吴伟斌(1978-),男,汉族,广东中山人,博士,副教授,主要从事机电一体化技术在农业上的应用研究工作,E-mail:wuweibin@scau.edu.cn
猜你喜欢
金桥(2020年10期)2020-11-26
制造技术与机床(2019年8期)2019-09-03
阅读与作文(小学高年级版)(2019年5期)2019-05-27
好孩子画报(2019年12期)2019-01-13
制造技术与机床(2018年11期)2018-11-23
河北农机(2017年12期)2018-01-20
制造技术与机床(2017年9期)2017-11-27
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
自动化学报(2016年8期)2016-04-16