基于Solidworks的花生挖掘类收获机具仿真设计
2014-02-18 07:18陈中武张久雷
现代农业装备 2014年5期
陈中武,张久雷,刘 华
(1.广东省现代农业装备研究所,广州 510630;2.罗定职业技术学院,罗定 527200)
基于Solidworks的花生挖掘类收获机具仿真设计
陈中武1,张久雷2※,刘 华1
(1.广东省现代农业装备研究所,广州 510630;2.罗定职业技术学院,罗定 527200)
根据广东花生品种、种植农艺与收获工艺要求,吸取国内外花生收获机械的基础上,利用Solidworks软件模拟仿真设计了一种花生挖掘类收获机具。该收获机具虚拟地悬挂于中小型拖拉机后,由拖拉机带动该收获机具进行集花生挖掘、碎土、粘土分离和铺放等工序为一体的机械化收获作业。这种模拟仿真设计方法能以较快的速度完成设计制作,不仅形象方便,还可节省研发成本,为广东花生收获机的设计开发提供一定参考。
花生 收获机 仿真设计 Solidworks
0 引言
花生是广东最重要的油料作物之一,全省各地均有种植。2013年广东花生种植单位面积总成本约为16 867元/hm2,比2012年上升4.80%。在测算2012年广东省花生产业各投入要素的贡献率中,科技贡献为41.7%、物质投入贡献率为42.4%、土地贡献率为20.7%,而劳动力贡献率为-1.67%,这说明土地是基础保障,科技与肥料、农药等农资投入对花生产业的发展具有很强的促进作用,而人工劳动力急需机械化生产设备来替代[1]。
目前花生生产过程中,耕整、灌溉和植保机械化已基本完善,播种和覆膜机械不断成熟,但收获、摘果、脱壳、干燥等生产环节的机械品种少、性能和质量还不能完全满足要求[2]。特别是收获作业环节,主要靠人工完成,劳动强度大、作业成本高、效率低、损失大已经成为花生规模化产业发展的主要瓶颈。因此,需要研制花生收获机械以解决人工收获花生存在的问题。
在广泛调研产区农户对花生收获机械建议的基础上,查阅国内外花生收获机型并参考其机构原理,结合产区花生种植实际情况,利用Solidworks三维软件模拟仿真设计了一种新型花生收获机具。该模拟仿真的花生收获机具虚拟地悬挂于中小型拖拉机后,由拖拉机带动该机具进行挖掘花生及收获作业。这种基于Solidworks模拟仿真软件的设计方法能以较快的速度完成设计制作,不仅形象方便,还可节省研发成本,为广东花生收获机的设计开发提供一定参考。
1 花生机械化收获作业模式
针对花生收获环节机械化程度不同,将花生收获机械划分为三种收获模式:分段机械收获模式、联合机械收获模式、两段机械收获模式。其中分段机械收获是指对应花生收获各工序由不同的收获机械进行作业;联合机械收获是指花生收获各工序均
由一台机器完成全收获过程作业;两段机械收获是将花生收获的全过程分为两段,即一段是先用挖掘机具进行花生挖掘、铺放作业,另一段是用带捡拾、摘果、果土秧分离、收集、装车功能为一体的捡拾机械作业。美国等发达国家均采用两段收获模式[3]。基于广东南方地区相对小面积种植、田块分散、地形复杂多变,大多种植于丘陵地区的情况,本文模拟仿真设计的花生收获机械采用此两段收获模式,即设计一种集花生挖掘、碎土、粘土分离和铺放等工序为一体的收获机具(捡拾机械不在此讨论)。
2 总体方案设计
2.1 总体布局
如图1所示,花生收获机主要由拖拉机和其后的收获机具组成。拖拉机选用广东农村普遍使用的中小型配套动力机型,收获机具如图2所示。作为花生收获机的核心机构,本文仿真设计的花生收获机具样机主要由机架、拉杆、升运分离传送带、三角带、带轮、摇杆、分离簸筛、万向轮、摇杆、集铺弯板、偏心轮、挖掘铲、传动轴套、挂杆、变速箱等组成。
2.2 传动方案
基于广东省农村花生种植分散经营的现状和农民的消费水平的限制,以及农村现拥有的大量的中小型拖拉机的特点,决定了在今后一段时期内,广东省仍然要以中小功率的花生收获机为设计生产和推广对象,中小型花生收获机械将是花生收获机市场上的主导产品。本文仿真设计的花生收获机具选用功率为30 kW以下的中小型拖拉机为配套动力,拖拉机动力输出轴输出动力传动方案如图3所示。传动路线为:动力由拖拉机动力输出轴传入变速箱,经变速箱减速增扭后将动力分别传动给带轮和凸轮。其中,通过凸轮的动力经与凸轮链接的连杆机构传递给簸筛进行快速往复运动;通过带轮的动力经过皮带、链轮、链条传输给升运输送装置,以此带动作物运动至簸筛。

图1 花生收获机总体布置图
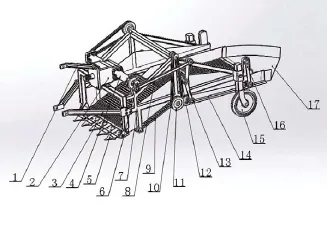
图2 收获机具总体结构示意图
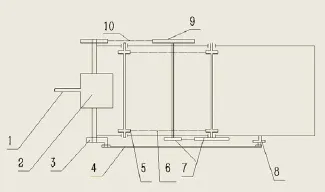
图3 传动方案
2.3 工作过程
作业时,将收获机具悬挂于拖拉机后面,拖拉机牵引收获机具前行,带动尖嘴弧形挖掘铲入土,将花生及粘土一起铲出,并在拖拉机前行惯性作用下经挖掘铲栅条继续向后移动至升运分离输送带上,在挖掘铲栅条和升运分离输送带的提升输送下,花
生与粘土进行初次分离,然后继续向后移动至分离簸筛处,与粘土再次分离,经集铺弯板装置后,基本与粘土分离的花生即铺放于地表上,由人工或相应机械拾取收集即可完成花生收获。
3 主要工作部件仿真设计
3.1 挖掘铲装置仿真设计
花生挖掘铲装置是收获机具关键零部件之一,其作用是切断花生根系及粘土,并将其混合物挖掘起来,在惯性动力下传输给挖掘铲栅条和粘土分离输送装置。挖掘铲工作时既要保证足够的入土深度,把土中所有的花生挖掘出来,又要防止挖掘铲缠草和壅土现象,以减少进入栅条和粘土分离装置的粘土和杂草,浪费功耗;还要考虑前行阻力小、挖掘深度稳定、耐磨损、碎土性好、自洁性好以及制作工艺方便等[4-5]。因此本文的花生挖掘铲的仿真设计为尖嘴弧形挖掘铲,结构如图4和图5所示。尖嘴弧形挖掘铲由5个尖嘴弧形刀具组成,尖嘴弧形挖掘铲的尖嘴刀具设计可减少铲尖与土壤的接触面积,以减少阻力增加切入土效果,弧形设计可有效提升碎土能力,便于后续的粘土分离工作。
3.2 分离传输装置仿真设计
分离传输装置是将栅条移动过来的花生粘土混合进行初次的粘土分离,并输送至下一个工序。分离传输装置主要由钢条、前、后链轮、链条、带轮、三角带和挂齿组成,结构如图6所示。
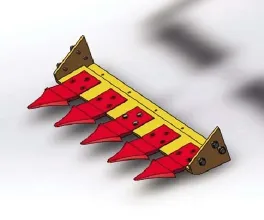
图4 花生挖掘铲装置

图5 尖嘴弧形刀具

图6 分离传送装置
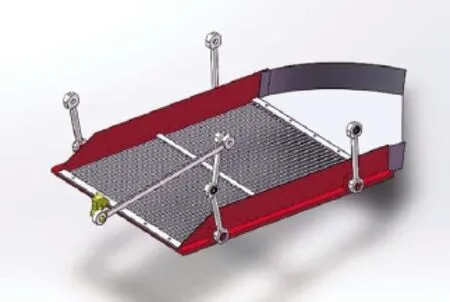
图7 花生分离簸筛及铺放装置
3.3 分离簸筛及铺放装置
分离簸筛装置是将分离输送装置移动过来的花生粘土混合物进行再次的花生粘土分离,并输送至集铺弯板装置上进行铺放。花生分离簸筛及铺放装置主要由传动齿轮、机架、凸轮、曲柄连杆机构、角度调节装置及集铺弯板等组成,如图7所示。工作时,经变速箱减速增扭后的动力传递给凸轮,凸轮动力与凸轮链接的曲柄连杆机构配合运动,传递
给簸筛进行快速的往复运动,便可实现在分离簸筛装置上花生与粘土的分离,然后进入集铺弯板装置,将花生铺放于地表,为后续拾取和收集工序做准备。
4 花生收获机构整体仿真设计(整机效果图)
本文利用Solidworks软件仿真设计了机架、尖嘴弧形挖掘铲装置、升运分离传送带装置、分离簸筛装置、曲柄连杆机构装置、集铺弯板装置、凸轮、带轮、三角带、链轮、链条、减速器、轴承、传动齿轮箱、传动轴以及地轮、三点悬挂机架等零部件,并进行了虚拟样机装配及仿真运行,效果良好。图8所示为花生收获机具整体仿真效果图。

图8 花生收获机具虚拟样机图
4 结论
1)花生收获使用分段收获技术,配套中小型拖拉机联合作业,适合南方地区相对小面积种植、田块分散、地形复杂多变,大多种植于丘陵地区的花生生产模式;
2)采用尖嘴弧形挖掘铲方式收获作业,入土性能、碎土效果好,功耗小、适应性强;
3)利用模拟仿真软件可较快的完成设计制作,其虚拟样机技术所展现的结构原理、作业方式不仅形象方便、可为样机设计开发提供参考,还可大大降低研发成本。
[1]段洪洋,张禄祥,刘序,等.2013年广东花生产业发展形势与对策建议[J].广东农业科学,2014(4):8-10.
[2]周桂元,梁炫强.广东花生产业发展现状、存在问题及对策建议[J].花生学报,2010,39(1):36-41.
[3]关萌,赵宝权,高连兴.花生收获机械的类型及特点[J].农业科技与装备,2013(10):34-39.
[4]吕冰,吕钊钦.振动式花生收获机的设计[J].农机化研究,2012(12):111-114.
[5]王志军,陈士新,曹明亮.马铃薯收获机结构设计探讨[J].湖南农机,2008(7):l-3.
Based on the Solidworks of Simulation Design On Digging Type Peanut Harvester
Chen Zhong-wu1,Zhzng Jiu-lei2,Liu hua1
(1.Guangdong institute of Modern Agricultural Equipent Guangzhou 510630 2.Luoding PolyTechnic Luoding 527200)
According to the requirement of Guangdong peanut varieties,planting and harvesting process,a kind of digging peanut harvester is simulation designed with software of Solidworks based on the original design experience.The harvester which be driven to digging,broken soil,clay separation and Laying,virtual suspension in tractor back and can be applied with medium and small sized tractor.This simulation design method can be completed at a faster rate design,not only the image is convenient,but also save the development costs,to provide some reference for the design and development of Guangdong peanut harvester.
peanut harvester,simulation design,solidworks
陈中武(1972-),男,广东罗定人,工程师,主要从事农业机械方面研究开发
※通讯作者:张久雷(1981—),男,山东沂水人,高级技师。Email:406011313@qq.com
猜你喜欢
中国农村科技(2021年12期)2021-12-28
军事文摘(2020年24期)2020-11-29
江苏农机化(2020年5期)2020-10-26
———2020 款中农博远玉米收获机值得期待
河北农机(2020年1期)2020-01-11
小小说月刊(2019年22期)2019-11-19
小小说月刊·下半月(2019年11期)2019-01-06
广东第二课堂·小学(2018年3期)2018-04-14
浙江大学学报(工学版)(2016年9期)2016-06-05
创新作文(1-2年级)(2015年5期)2015-07-18
创新作文(1-2年级)(2015年2期)2015-04-08